You might also like
- Multicore Processors and Systems PDFDocument310 pagesMulticore Processors and Systems PDFwkfzar100% (1)
- Kerrighed and Parallelism: Cluster Computing On Single System Image Operating SystemsDocument10 pagesKerrighed and Parallelism: Cluster Computing On Single System Image Operating SystemsPercival Jacinto Leigh511No ratings yet
- Design and Implementation of A Parallel Priority Queue On Many-Core ArchitecturesDocument10 pagesDesign and Implementation of A Parallel Priority Queue On Many-Core Architecturesfonseca_rNo ratings yet
- VLSIDocument25 pagesVLSIgangavinodc123No ratings yet
- X-SRAM Enabling In-Memory Boolean Computations in CMOS Static Random Access MemoriesDocument14 pagesX-SRAM Enabling In-Memory Boolean Computations in CMOS Static Random Access Memoriesshri1098No ratings yet
- Introduction To Parallel ProcessingDocument23 pagesIntroduction To Parallel ProcessingJámès KõstãNo ratings yet
- Rubio Campillo2018Document3 pagesRubio Campillo2018AimanNo ratings yet
- Critical Path ArchitectDocument11 pagesCritical Path ArchitectBaluvu JagadishNo ratings yet
- Turbgrid - Post-Processing Turbulence Simulation Data in Grid ComputingDocument9 pagesTurbgrid - Post-Processing Turbulence Simulation Data in Grid ComputingGunvir SinghNo ratings yet
- Low-Loss Photonic Reservoir Computing With Multimode Photonic Integrated CircuitsDocument10 pagesLow-Loss Photonic Reservoir Computing With Multimode Photonic Integrated CircuitsprajneshNo ratings yet
- Trident: A Scalable Architecture For Scalar, Vector, and Matrix OperationsDocument9 pagesTrident: A Scalable Architecture For Scalar, Vector, and Matrix OperationsjackienessNo ratings yet
- CS6703 - Rejin NotesDocument80 pagesCS6703 - Rejin NotesCSE DEPARTMENTNo ratings yet
- Isca TSPDocument14 pagesIsca TSPupdatesmockbankNo ratings yet
- Grid and Cloud Full NotesDocument80 pagesGrid and Cloud Full NotesVive Kowsal YanissNo ratings yet
- A High-Efficiency Spaceborne Processor For Hybrid Neural NetworksDocument16 pagesA High-Efficiency Spaceborne Processor For Hybrid Neural NetworksguantongpengNo ratings yet
- Understanding The Impact of Multi-Core Architecture in Cluster Computing: A Case Study With Intel Dual-Core SystemDocument8 pagesUnderstanding The Impact of Multi-Core Architecture in Cluster Computing: A Case Study With Intel Dual-Core SystemhfarrukhnNo ratings yet
- TrueNorth Design and Tool Flow of A 65 MW 1 Million Neuron Programmable Neurosynaptic ChipDocument21 pagesTrueNorth Design and Tool Flow of A 65 MW 1 Million Neuron Programmable Neurosynaptic Chip何军民No ratings yet
- Beyond Dataflow: Borut Robi C, Jurij Silc and Theo UngererDocument13 pagesBeyond Dataflow: Borut Robi C, Jurij Silc and Theo UngererhectorjazzNo ratings yet
- PC EditorialDocument3 pagesPC EditorialIpan Ginano GobelNo ratings yet
- Deploying Customized Data Representation and Approximate Computing in Machine Learning ApplicationsDocument6 pagesDeploying Customized Data Representation and Approximate Computing in Machine Learning ApplicationsHarsh Mittal-36No ratings yet
- Vlsi Term Paper TopicsDocument7 pagesVlsi Term Paper Topicsafmzxppzpvoluf100% (1)
- On-Chip Communication Network: User Manual V1.0.1: Occn U M - V1.0.1 14 O, 2003Document64 pagesOn-Chip Communication Network: User Manual V1.0.1: Occn U M - V1.0.1 14 O, 2003mdgramma6678No ratings yet
- Network Coding For Large Scale Content Distribution: Christos GkantsidisDocument6 pagesNetwork Coding For Large Scale Content Distribution: Christos GkantsidisrrougetrerNo ratings yet
- Cluster ComputingDocument28 pagesCluster ComputingVinayKumarSingh100% (6)
- RNN-Based Radio Resource Management OnDocument14 pagesRNN-Based Radio Resource Management OnTRIAD TECHNO SERVICESNo ratings yet
- Neuro-Memristive Circuits For Edge Computing: A ReviewDocument20 pagesNeuro-Memristive Circuits For Edge Computing: A ReviewMax LorenNo ratings yet
- Thesis Paper On Wireless Sensor NetworksDocument8 pagesThesis Paper On Wireless Sensor Networksihbjtphig100% (2)
- Parallel and Distributed Computing Research PaperDocument8 pagesParallel and Distributed Computing Research PaperSamita Prava JenaNo ratings yet
- To HPC With MPI For Data Science: Frank NielsenDocument304 pagesTo HPC With MPI For Data Science: Frank NielsenِAhmed Jebur AliNo ratings yet
- Topological Properties of Multiprocessor Interconnection NetworkDocument8 pagesTopological Properties of Multiprocessor Interconnection NetworkSamita Prava JenaNo ratings yet
- Maya June PresentationDocument29 pagesMaya June PresentationMuktikant MishraNo ratings yet
- Deep Learning On Modern CpusDocument11 pagesDeep Learning On Modern CpusGary Ryan DonovanNo ratings yet
- 2008 01 ConfigDocument2 pages2008 01 ConfigDamodar TeluNo ratings yet
- High Performance and Scalable GPU Graph TraversalDocument15 pagesHigh Performance and Scalable GPU Graph TraversalkumarabarbarianNo ratings yet
- Synchronous Data Flow AlgorithmsDocument12 pagesSynchronous Data Flow Algorithmscpayne10409No ratings yet
- WSNOPSYS Article 159 Final 159Document6 pagesWSNOPSYS Article 159 Final 159Usman TariqNo ratings yet
- Survey On Minimal Implementation of Clustering Using Virtual MachinesDocument12 pagesSurvey On Minimal Implementation of Clustering Using Virtual MachinesEshwar NorthEastNo ratings yet
- Qthreads PDFDocument8 pagesQthreads PDFStefano NefastoNo ratings yet
- Comparison of Efficient Routing Table Data Structures: Dominik SchöffmannDocument6 pagesComparison of Efficient Routing Table Data Structures: Dominik SchöffmannAmaal GhaziNo ratings yet
- Week - 01 - Lec1 03 03 2021Document19 pagesWeek - 01 - Lec1 03 03 2021Zainab ShahzadNo ratings yet
- Microprocessor Array SystemDocument7 pagesMicroprocessor Array SystemBsal SpktNo ratings yet
- Improving The Scalabiliy of Neutron Cross-Section Lookup Codes On Multicore NUMA SystemDocument9 pagesImproving The Scalabiliy of Neutron Cross-Section Lookup Codes On Multicore NUMA SystemPeter LiuNo ratings yet
- Research Thesis On Wireless Sensor NetworksDocument4 pagesResearch Thesis On Wireless Sensor Networkscaitlinwilsonsavannah100% (2)
- 2018 Lafayette AdCoDocument7 pages2018 Lafayette AdCoLev LafayetteNo ratings yet
- Exashark: A Scalable Hybrid Array Kit For Exascale SimulationDocument7 pagesExashark: A Scalable Hybrid Array Kit For Exascale SimulationImen ChakrounNo ratings yet
- The Demikernel Datapath OS Architecture For Microsecond-Scale Datacenter SystemsDocument17 pagesThe Demikernel Datapath OS Architecture For Microsecond-Scale Datacenter Systemsrose jackNo ratings yet
- C4-IEEE ParallelRTDocument8 pagesC4-IEEE ParallelRTLordu GamerNo ratings yet
- Advance Computing Technology (170704)Document106 pagesAdvance Computing Technology (170704)Satryo PramahardiNo ratings yet
- Neuromorphic Computing-From Devices To IntegratedcircuitsDocument21 pagesNeuromorphic Computing-From Devices To Integratedcircuits322203359001No ratings yet
- Achieving High Performance ComputingDocument58 pagesAchieving High Performance ComputingIshamNo ratings yet
- Scheduled Dataflow: Execution Paradigm, Architecture, and Performance EvaluationDocument13 pagesScheduled Dataflow: Execution Paradigm, Architecture, and Performance EvaluationssfofoNo ratings yet
- Glomosim: A Scalable Network Simulation EnvironmentDocument12 pagesGlomosim: A Scalable Network Simulation Environmentsumukha1999No ratings yet
- Streaming Application On Many-Core SystemsDocument17 pagesStreaming Application On Many-Core SystemsabafpgaNo ratings yet
- Special Issue On HardwareDocument2 pagesSpecial Issue On HardwareKumaranNo ratings yet
- Parallel Programming Models and ParadigmsDocument24 pagesParallel Programming Models and Paradigmsmig118No ratings yet
- Design of Fpga Based General Purpose Neural Network: MR Prashant D.Deotaleproflalit DoleDocument5 pagesDesign of Fpga Based General Purpose Neural Network: MR Prashant D.Deotaleproflalit DolePurohit Manish RNo ratings yet
- Unit 1Document22 pagesUnit 1HariniNo ratings yet
- University of South Asia - Computer Architecture Project Proposal The Warp Computer Name: Faseeh Ur Rehman Roll No: B-20010Document5 pagesUniversity of South Asia - Computer Architecture Project Proposal The Warp Computer Name: Faseeh Ur Rehman Roll No: B-20010haiderNo ratings yet
- Algorithm-Structured Computer Arrays and Networks: Architectures and Processes for Images, Percepts, Models, InformationFrom EverandAlgorithm-Structured Computer Arrays and Networks: Architectures and Processes for Images, Percepts, Models, InformationNo ratings yet
- Deep Learning with Python: A Comprehensive Guide to Deep Learning with PythonFrom EverandDeep Learning with Python: A Comprehensive Guide to Deep Learning with PythonNo ratings yet
- Partial Privatization and Bank Performance EvidencDocument49 pagesPartial Privatization and Bank Performance EvidencPrasadNo ratings yet
- Research & Development: (IJRD)Document8 pagesResearch & Development: (IJRD)PrasadNo ratings yet
- Ujjjkji 98876654 DvhtgyuuuhjuDocument48 pagesUjjjkji 98876654 DvhtgyuuuhjuPrasadNo ratings yet
- National Institute of Technology: M. Tech. Degree IN Non - Destructive TestingDocument34 pagesNational Institute of Technology: M. Tech. Degree IN Non - Destructive TestingPrasadNo ratings yet
- Volkswagen PDFDocument11 pagesVolkswagen PDFPrasadNo ratings yet
- IE23 Six Sigma Improvement Opportunities in The Working Techniques of Bachhpan NGODocument8 pagesIE23 Six Sigma Improvement Opportunities in The Working Techniques of Bachhpan NGOPrasadNo ratings yet
- Experimental Investigations To Study The Air Flow Patterns On The Headlight Domes of Different Two WheelersDocument5 pagesExperimental Investigations To Study The Air Flow Patterns On The Headlight Domes of Different Two WheelersPrasadNo ratings yet
- An Innovative Technique To Increase Lift of A Coanda UAV: March 2017Document10 pagesAn Innovative Technique To Increase Lift of A Coanda UAV: March 2017PrasadNo ratings yet
- Career Objective: Srinivas Kondapalli Door No:1-95/5, Gudala, Allavaram, East Godavari District. Mobile No.9182892546Document2 pagesCareer Objective: Srinivas Kondapalli Door No:1-95/5, Gudala, Allavaram, East Godavari District. Mobile No.9182892546PrasadNo ratings yet
- Wikipedia OrgDocument6 pagesWikipedia OrgPrasadNo ratings yet
- Self Introduction SampleDocument1 pageSelf Introduction SamplePrasad75% (4)
- Scanned by CamscannerDocument8 pagesScanned by CamscannerPrasadNo ratings yet
- Alternative Low-Cost Building Material - Ar - Vidya & Ar - RadhaDocument7 pagesAlternative Low-Cost Building Material - Ar - Vidya & Ar - RadhaPrasadNo ratings yet
- Fireclass Prec en App - 0Document37 pagesFireclass Prec en App - 0axwellNo ratings yet
- Midterm Exam Routine - Spring 2020Document4 pagesMidterm Exam Routine - Spring 2020Saim MollahNo ratings yet
- IRFR7740 DataSheetDocument13 pagesIRFR7740 DataSheetSummer SpringNo ratings yet
- HP Z220 Convertible Minitower Workstation Product Specifications - HP® Customer SupportDocument6 pagesHP Z220 Convertible Minitower Workstation Product Specifications - HP® Customer SupportAluizio LimaNo ratings yet
- Fire Alarm Operation & Maintenance Manual SIE-820-6013-01 PDFDocument114 pagesFire Alarm Operation & Maintenance Manual SIE-820-6013-01 PDFMudabbir HussainNo ratings yet
- EasyLog CloudDocument2 pagesEasyLog CloudInv XaashaNo ratings yet
- CSS-Grade 9 Quarter 1Document44 pagesCSS-Grade 9 Quarter 1Edralyn Luad80% (10)
- Zaaa Serials Skylake-U System Block Diagram: Sky Lake Ult 15WDocument48 pagesZaaa Serials Skylake-U System Block Diagram: Sky Lake Ult 15Wzawnaing soe08No ratings yet
- Service Manual: Uninterruptible Power SystemsDocument18 pagesService Manual: Uninterruptible Power SystemsAbdelwhab ElsaftyNo ratings yet
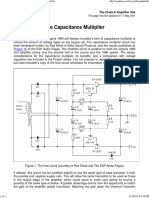
- The Capacitance Multiplier: (Back To Index)Document4 pagesThe Capacitance Multiplier: (Back To Index)Daniel ScardiniNo ratings yet
- Multi-Level Configurations For Three-Phase AC-DC 48V Power SupplyDocument7 pagesMulti-Level Configurations For Three-Phase AC-DC 48V Power SupplyderbalijalelNo ratings yet
- Assesment English (11DKM19F1055)Document6 pagesAssesment English (11DKM19F1055)Muhd AriffNo ratings yet
- Space Division Multiple Access (SDMA) : It Controls The Radiated Energy For Each User in SpaceDocument2 pagesSpace Division Multiple Access (SDMA) : It Controls The Radiated Energy For Each User in SpaceKrishanu ModakNo ratings yet
- UNUTECYEMEN Profile Company 2014Document21 pagesUNUTECYEMEN Profile Company 2014unitecyemenNo ratings yet
- S 4 Introduction Architecture ARM Processeurs Embarqués PDFDocument9 pagesS 4 Introduction Architecture ARM Processeurs Embarqués PDFChaima BelhediNo ratings yet
- 2011 - NJR Short CatalogDocument8 pages2011 - NJR Short CatalogWaldo Perez SolisNo ratings yet
- Power Supply Unit Calculator - PSU Calculator - PC BuildsDocument3 pagesPower Supply Unit Calculator - PSU Calculator - PC BuildsnergeiaNo ratings yet
- Embedded Systems Design Programming and Applications 1St Edition A K Ganguly Online Ebook Texxtbook Full Chapter PDFDocument69 pagesEmbedded Systems Design Programming and Applications 1St Edition A K Ganguly Online Ebook Texxtbook Full Chapter PDFdavid.ruff874100% (12)
- Chapter 22 Example of Maintenance 4Document9 pagesChapter 22 Example of Maintenance 4Ij OooNo ratings yet
- Running Case With Real Data Dell Direct PDFDocument6 pagesRunning Case With Real Data Dell Direct PDFaasthaNo ratings yet
- 4.2.8 Lab - Configure Router On A Stick Inter Vlan Routing - Es XLDocument5 pages4.2.8 Lab - Configure Router On A Stick Inter Vlan Routing - Es XLVictor Manuel Rivas Rodriguez100% (1)
- Introduction To Computer & Applications: Imran Mujaddid RabbaniDocument136 pagesIntroduction To Computer & Applications: Imran Mujaddid RabbaniHamzaNo ratings yet
- EC8353 EDC Syllabus PDFDocument1 pageEC8353 EDC Syllabus PDFDharani KumarNo ratings yet
- Emu LogDocument13 pagesEmu LogJorge FernandezNo ratings yet
- College of Computer and Information Sciences Department of Information Technology IT224 First Semester 1436/1437 Sheet 3 (Chapter 15)Document6 pagesCollege of Computer and Information Sciences Department of Information Technology IT224 First Semester 1436/1437 Sheet 3 (Chapter 15)ashwiniNo ratings yet
- Diode (Semicond) - PART ADocument30 pagesDiode (Semicond) - PART Anur ain natasyaNo ratings yet
- DH-HCVR5104/5108/5116HE-V2: 4/8/16CH 720P-Pro Mini 1U HDCVI DVRDocument4 pagesDH-HCVR5104/5108/5116HE-V2: 4/8/16CH 720P-Pro Mini 1U HDCVI DVRRamiro GermelinNo ratings yet
- Design of AVR - Based Embedded Ethernet InterfaceDocument13 pagesDesign of AVR - Based Embedded Ethernet Interfacepremsagar483No ratings yet
- Fet Biasing-ReviewDocument9 pagesFet Biasing-ReviewjjeongdongieeNo ratings yet
- Synchronous Optical Network: Sonet Standard For Synchronous Data Transmission On Optical MediaDocument19 pagesSynchronous Optical Network: Sonet Standard For Synchronous Data Transmission On Optical Mediamohammed draeyNo ratings yet