You might also like
- Chevy Differentials: How to Rebuild the 10- and 12-BoltFrom EverandChevy Differentials: How to Rebuild the 10- and 12-BoltRating: 5 out of 5 stars5/5 (8)
- Engine Cpta Czca Czea Ea211 EngDocument360 pagesEngine Cpta Czca Czea Ea211 EngleuchiNo ratings yet
- Design and Optimization of Formula SAE Suspension SystemDocument27 pagesDesign and Optimization of Formula SAE Suspension SystemRushik KudaleNo ratings yet
- Optimization of Double Wishbone Suspension System by Replacing Its Upper Arm by Single Member in Atv IJERTV6IS110006 PDFDocument6 pagesOptimization of Double Wishbone Suspension System by Replacing Its Upper Arm by Single Member in Atv IJERTV6IS110006 PDFMahesh BorateNo ratings yet
- 11 - Leo Vega Bolt Failure AnalysisDocument35 pages11 - Leo Vega Bolt Failure AnalysissymkimonNo ratings yet
- Design - Report (PDR)Document8 pagesDesign - Report (PDR)Abhishek DixitNo ratings yet
- Velo Steering 09 10Document8 pagesVelo Steering 09 10onezero111No ratings yet
- Design of Double Wishbone Suspension System of BAJA VehicleDocument8 pagesDesign of Double Wishbone Suspension System of BAJA VehicleSai Krishna SKNo ratings yet
- Bearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsFrom EverandBearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsRating: 4 out of 5 stars4/5 (1)
- Senior Project ReportDocument6 pagesSenior Project ReportRoss Bunnell100% (1)
- Advanced Seat Suspension Control System Design for Heavy Duty VehiclesFrom EverandAdvanced Seat Suspension Control System Design for Heavy Duty VehiclesNo ratings yet
- Lesson No. 1 - Pipe Sizing HydraulicsDocument4 pagesLesson No. 1 - Pipe Sizing Hydraulicsusaid saifullahNo ratings yet
- Suspension Systems and ComponentsDocument90 pagesSuspension Systems and Componentsmaheshgarg81100% (2)
- Module 5 Greek ArchDocument22 pagesModule 5 Greek ArchKyla A. EstoestaNo ratings yet
- Socrates 8dDocument8 pagesSocrates 8dcarolinaNo ratings yet
- POLE FOUNDATION ANALYSIS EXCEL TOOLDocument18 pagesPOLE FOUNDATION ANALYSIS EXCEL TOOLJosue HasbunNo ratings yet
- Irjet V7i51227Document7 pagesIrjet V7i51227Ashbin BIJUNo ratings yet
- All Terrain VehicleDocument9 pagesAll Terrain VehicleAnirudh PanickerNo ratings yet
- Irjet V7i480Document7 pagesIrjet V7i480DushyantNo ratings yet
- Kich Thuoc TreoDocument27 pagesKich Thuoc TreoDiệp Vĩ KhangNo ratings yet
- Legacy V Design Report: Varun Talathi, Ajinkya Belsare, Aditya Chivate, Abhilash ChopadeDocument8 pagesLegacy V Design Report: Varun Talathi, Ajinkya Belsare, Aditya Chivate, Abhilash ChopadeJuicYm mNo ratings yet
- Design and Development of Front Suspension for an Off-Road VehicleDocument6 pagesDesign and Development of Front Suspension for an Off-Road VehicleRodrigo bolaNo ratings yet
- Lva1 App6892Document9 pagesLva1 App6892ssaassaasssNo ratings yet
- A Report On Design Approach For FSAE Car..Document8 pagesA Report On Design Approach For FSAE Car..Sandeep Kr. Mishra100% (1)
- Paper17609 635 PDFDocument27 pagesPaper17609 635 PDFSURAJ GAIKWADNo ratings yet
- Priliminary'design Report FsaeDocument8 pagesPriliminary'design Report Fsaegd007200No ratings yet
- Stability Improvement of An ATV by Modifying Suspension ParametersDocument5 pagesStability Improvement of An ATV by Modifying Suspension ParametersAndhdNo ratings yet
- 1 Final Technical Report Mini BajaDocument14 pages1 Final Technical Report Mini BajaLucasNo ratings yet
- Irjet V6i4302Document3 pagesIrjet V6i4302Azat Adar KaraNo ratings yet
- MET2013 Hinojosa RicardoDocument27 pagesMET2013 Hinojosa RicardoAmal GeorgeNo ratings yet
- 2017 Baja SAeDocument21 pages2017 Baja SAeFer SalazarNo ratings yet
- Irjet V5i6554 PDFDocument3 pagesIrjet V5i6554 PDFAloaa AlaaNo ratings yet
- Design and Analysis of A Pushrod Suspension System For A Formula Racing CarDocument4 pagesDesign and Analysis of A Pushrod Suspension System For A Formula Racing CarAmanNo ratings yet
- BAJA SAE Design Report: Team AtharvaDocument8 pagesBAJA SAE Design Report: Team AtharvaVikrant ThakurNo ratings yet
- Baja Suspension ReportDocument3 pagesBaja Suspension ReportheroNo ratings yet
- Baja Design ReportDocument9 pagesBaja Design ReportAkhilNo ratings yet
- Whelhub DesignDocument10 pagesWhelhub DesignamoyaNo ratings yet
- Design Report of Sae Baja IndiaDocument9 pagesDesign Report of Sae Baja Indiagobajasaeindia67% (3)
- Design & Fabrication of Front Wheel Upright Assembly For An ATVDocument5 pagesDesign & Fabrication of Front Wheel Upright Assembly For An ATVumeshNo ratings yet
- Design Report Car 30Document14 pagesDesign Report Car 30PRANESH SHANKAR SNo ratings yet
- Design of Student Formula Race Car Chassis: Abhijeet DasDocument5 pagesDesign of Student Formula Race Car Chassis: Abhijeet DasSammmNo ratings yet
- Union College SAE Baja Vehicle Design Report: Matthew Beenen, Jon Wilson and Ned Lincoln Union College Dutchmen RacingDocument14 pagesUnion College SAE Baja Vehicle Design Report: Matthew Beenen, Jon Wilson and Ned Lincoln Union College Dutchmen RacingsteeluisNo ratings yet
- WCE2015 pp1283-1286 PDFDocument4 pagesWCE2015 pp1283-1286 PDFAftaab AlamNo ratings yet
- Design and Analysis of Modified Front Double Wishbone Suspension For A Three Wheel Hybrid VehicleDocument4 pagesDesign and Analysis of Modified Front Double Wishbone Suspension For A Three Wheel Hybrid VehicleRima AroraNo ratings yet
- Calculations and Graphs ReportDocument11 pagesCalculations and Graphs ReportKenneth C.LinojNo ratings yet
- Design and Optimization of Hub and Knuckle For Formula SAE CarDocument5 pagesDesign and Optimization of Hub and Knuckle For Formula SAE CarTalles OliveiraNo ratings yet
- Simulation Aspects of A Full-Car ATV Model Semi-Active SuspensionDocument6 pagesSimulation Aspects of A Full-Car ATV Model Semi-Active SuspensionRashesh VagadiaNo ratings yet
- Irjet V4i10240 PDFDocument7 pagesIrjet V4i10240 PDFSai Krishna SKNo ratings yet
- 2009 DesignReport Michugan v2Document8 pages2009 DesignReport Michugan v2Midhun JoseNo ratings yet
- Numerical Estimation of The Torsional Stiffness CHDocument14 pagesNumerical Estimation of The Torsional Stiffness CHKiran ShetNo ratings yet
- Suspension SystemDocument10 pagesSuspension SystemMécanique et Diagnostic automobileNo ratings yet
- Design and analysis of suspension componentsDocument23 pagesDesign and analysis of suspension componentsGowtham ChNo ratings yet
- Trang 81 115Document35 pagesTrang 81 115Diệp Vĩ KhangNo ratings yet
- Analysis For Suspension Hardpoint of Formula SAE Car Based On Correlation TheoryDocument6 pagesAnalysis For Suspension Hardpoint of Formula SAE Car Based On Correlation TheoryAJHAY BABU J KNo ratings yet
- Abstract:: Design Report For Baja Saeindia 2018Document10 pagesAbstract:: Design Report For Baja Saeindia 2018AndhdNo ratings yet
- Modeling and Simulation Study of BAJA SAEINDIA All Terrain Vehicle (ATV) Using Integrated MBD-FEA ApproachDocument15 pagesModeling and Simulation Study of BAJA SAEINDIA All Terrain Vehicle (ATV) Using Integrated MBD-FEA ApproachRohit RajNo ratings yet
- BAJA Design ReportDocument55 pagesBAJA Design ReportGauravNo ratings yet
- Research Paper SuspensionDocument7 pagesResearch Paper SuspensionAnirudh GuptaNo ratings yet
- Design of Accurate Steering Gear MechanismDocument12 pagesDesign of Accurate Steering Gear Mechanismtarik RymNo ratings yet
- Design of Accurate Steering Gear MechanismDocument12 pagesDesign of Accurate Steering Gear Mechanism1DA17ME055 Harshit MDNo ratings yet
- Detailed Specifications: Roll CageDocument6 pagesDetailed Specifications: Roll Cageneelesh_dwivedi7No ratings yet
- ME 2013 04 Designing Inexpensive Automotive DynamometerDocument5 pagesME 2013 04 Designing Inexpensive Automotive DynamometerGuilherme PfeilstickerNo ratings yet
- 402B063 Experiment-1Document10 pages402B063 Experiment-1JuicYm mNo ratings yet
- Class Assignment No. 1 - Div B PDFDocument1 pageClass Assignment No. 1 - Div B PDFJuicYm mNo ratings yet
- Sinhgad College of Engineering, Pune Department of Mechanical Engineering Subject: CAD CAM and Automation Unit I ASSIGNMENT-01Document1 pageSinhgad College of Engineering, Pune Department of Mechanical Engineering Subject: CAD CAM and Automation Unit I ASSIGNMENT-01JuicYm mNo ratings yet
- 402B063 HP Assignment 1Document5 pages402B063 HP Assignment 1JuicYm mNo ratings yet
- BRAKESDocument4 pagesBRAKESJuicYm mNo ratings yet
- Roll Cage, Safety and Ergonomics Report: AbstractDocument32 pagesRoll Cage, Safety and Ergonomics Report: AbstractJuicYm mNo ratings yet
- BRAKESDocument4 pagesBRAKESJuicYm mNo ratings yet
- BRAKESDocument4 pagesBRAKESJuicYm mNo ratings yet
- Uses of Geometrical Dimensional and Tolerance: IntroductionDocument11 pagesUses of Geometrical Dimensional and Tolerance: IntroductionJuicYm mNo ratings yet
- Model20 Drawings DimensionsDocument1 pageModel20 Drawings DimensionsRustyNo ratings yet
- Braking SystemDocument26 pagesBraking SystemShyam VimalKumar100% (1)
- Model20 Drawings DimensionsDocument1 pageModel20 Drawings DimensionsRustyNo ratings yet
- The Future of Power Systems: Challenges, Trends, and Upcoming ParadigmsDocument16 pagesThe Future of Power Systems: Challenges, Trends, and Upcoming ParadigmsAndres ZuñigaNo ratings yet
- Valve Control System On A Venturi To Control FiO2 A Portable Ventilator With Fuzzy Logic Method Based On MicrocontrollerDocument10 pagesValve Control System On A Venturi To Control FiO2 A Portable Ventilator With Fuzzy Logic Method Based On MicrocontrollerIAES IJAINo ratings yet
- Unit 3 Digital Documentation: Multiple Choice QuestionsDocument7 pagesUnit 3 Digital Documentation: Multiple Choice Questions07tp27652% (21)
- Cegep Linear Algebra ProblemsDocument92 pagesCegep Linear Algebra Problemsham.karimNo ratings yet
- Schmitt Trigger FinalDocument4 pagesSchmitt Trigger Finalsidd14feb92No ratings yet
- SARTIKA LESTARI PCR COVID-19 POSITIVEDocument1 pageSARTIKA LESTARI PCR COVID-19 POSITIVEsartika lestariNo ratings yet
- Net CallDocument2 pagesNet CallFerdinand Monte Jr.100% (2)
- Effect of In-Store Shelf Spacing On PurchaseDocument20 pagesEffect of In-Store Shelf Spacing On Purchasesiddeshsai54458No ratings yet
- Algebra IiDocument2 pagesAlgebra IiFumiServi GuayaquilNo ratings yet
- Dcs Ict2113 (Apr22) - LabDocument6 pagesDcs Ict2113 (Apr22) - LabMarwa NajemNo ratings yet
- Basic Instructions: A Load (Contact) SymbolDocument3 pagesBasic Instructions: A Load (Contact) SymbolBaijayanti DasNo ratings yet
- ENGGBOQEstimation ReportDocument266 pagesENGGBOQEstimation ReportUTTAL RAYNo ratings yet
- The PersonalityDocument7 pagesThe PersonalityMeris dawatiNo ratings yet
- Simplified Coil DesignDocument6 pagesSimplified Coil DesignNestor Alberto EscalaNo ratings yet
- Company Profile Nadal en PDFDocument2 pagesCompany Profile Nadal en PDFkfctco100% (1)
- Product+Catalogue+2021+New+Final PreviewDocument34 pagesProduct+Catalogue+2021+New+Final Previewsanizam79No ratings yet
- Is BN 9789526041957Document72 pagesIs BN 9789526041957supriya rakshitNo ratings yet
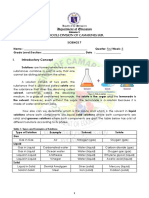
- SCI 7 Q1 WK5 Solutions A LEA TOMASDocument5 pagesSCI 7 Q1 WK5 Solutions A LEA TOMASJoyce CarilloNo ratings yet
- Modular Kitchen AnalysisDocument3 pagesModular Kitchen AnalysisGhanithan SubramaniamNo ratings yet
- Presentation 5 1Document76 pagesPresentation 5 1Anshul SinghNo ratings yet
- Xerox University Microfilms: 300 North Zeeb Road Ann Arbor, Michigan 48106Document427 pagesXerox University Microfilms: 300 North Zeeb Road Ann Arbor, Michigan 48106Muhammad Haris Khan KhattakNo ratings yet
- Quick Start Guide - QualiPoc AndroidDocument24 pagesQuick Start Guide - QualiPoc AndroidDmitekNo ratings yet
- CBSE KV Class VIII SA I Maths Sample Question Paper 2015Document3 pagesCBSE KV Class VIII SA I Maths Sample Question Paper 2015Amrita SenNo ratings yet
- PROBLEM 7 - CDDocument4 pagesPROBLEM 7 - CDRavidya ShripatNo ratings yet