You might also like
- (Hunt, J.) A Beginners Guide To Python 3 ProgrammingDocument440 pages(Hunt, J.) A Beginners Guide To Python 3 Programminglev7695% (37)
- RoboticsDocument394 pagesRoboticsPeter Nomikos100% (5)
- Industrial Robotics CourseDocument3 pagesIndustrial Robotics CourseAKSHAY KRISHNA K RNo ratings yet
- Robotics Simplified: An Illustrative Guide to Learn Fundamentals of Robotics, Including Kinematics, Motion Control, and Trajectory PlanningFrom EverandRobotics Simplified: An Illustrative Guide to Learn Fundamentals of Robotics, Including Kinematics, Motion Control, and Trajectory PlanningNo ratings yet
- V 2Document468 pagesV 2Mottalab ShaonNo ratings yet
- Altec - Loudspeaker Enclosure - Their Design and Use (Circa 1975) PDFDocument31 pagesAltec - Loudspeaker Enclosure - Their Design and Use (Circa 1975) PDFRaju100% (1)
- Robotics TeachingPlan BoSE&TC KBCDocument2 pagesRobotics TeachingPlan BoSE&TC KBCvydeo100% (1)
- ME2028 ROBOTICS LTPC 3003 OBJECTIVES AND UNITSDocument1 pageME2028 ROBOTICS LTPC 3003 OBJECTIVES AND UNITSdsathiyaNo ratings yet
- Siprotec 5 Digital Fault Recorder en Ic1000-K4605-A071-A1-7600Document24 pagesSiprotec 5 Digital Fault Recorder en Ic1000-K4605-A071-A1-7600api-241473079No ratings yet
- Iec 62271-102-2018Document226 pagesIec 62271-102-2018DianaMuñozNo ratings yet
- rOBOTICS NOTESDocument14 pagesrOBOTICS NOTESdsathiya100% (4)
- PDF d7024 Manual EspañolDocument80 pagesPDF d7024 Manual EspañolCésar JcNo ratings yet
- EC368 Robotics CourseDocument3 pagesEC368 Robotics CourseHello123No ratings yet
- EC368 RoboticsDocument3 pagesEC368 RoboticsBonifus Parambaloth LeenusNo ratings yet
- MEE3014 - ROBOTICS-AND-AUTOMATION - LT - 1.0 - 1 - Robotics and AutomationDocument3 pagesMEE3014 - ROBOTICS-AND-AUTOMATION - LT - 1.0 - 1 - Robotics and AutomationInzamam Ul HaqueNo ratings yet
- ME464 Robotics and Automation Course Delivery ManualDocument17 pagesME464 Robotics and Automation Course Delivery ManualTony K PaulNo ratings yet
- MME 1366: Robotics Credits: 3 LTP 300Document2 pagesMME 1366: Robotics Credits: 3 LTP 300virender gurauNo ratings yet
- ME809 9 Robotics LT PC: Anna University, Chennai Affiliated Institutions B.E. Mechanical Engineering Regulations - 2017Document2 pagesME809 9 Robotics LT PC: Anna University, Chennai Affiliated Institutions B.E. Mechanical Engineering Regulations - 2017Mech HoD DAITNo ratings yet
- RoboticsDocument2 pagesRoboticsvasanthsatNo ratings yet
- ME464 Robotics and AutomationDocument2 pagesME464 Robotics and AutomationloopycrowNo ratings yet
- ECE2008 Robotics and AutomationDocument2 pagesECE2008 Robotics and AutomationRaj GaneshNo ratings yet
- Robotics Fundamentals, Drives, Sensors, Kinematics & ProgrammingDocument1 pageRobotics Fundamentals, Drives, Sensors, Kinematics & ProgrammingmohanmzcetNo ratings yet
- ILE 301 ME 319 RoboticsDocument2 pagesILE 301 ME 319 RoboticsZeenat KhanNo ratings yet
- RoboticsDocument1 pageRoboticstagoreboopathyNo ratings yet
- Bece312l Robotics-And-Automation TH 1.0 75 Bece312lDocument2 pagesBece312l Robotics-And-Automation TH 1.0 75 Bece312lViswanadh VankamamidiNo ratings yet
- Syllabus - RobaticsDocument2 pagesSyllabus - RobaticsSatheesh KumarNo ratings yet
- Robotics SyllubusDocument1 pageRobotics SyllubusSubramaniyan MahendiranNo ratings yet
- IPS Academy Offers Minor in Robotics EngineeringDocument9 pagesIPS Academy Offers Minor in Robotics EngineeringajayNo ratings yet
- RoboticsDocument2 pagesRoboticsRaghav goelNo ratings yet
- RoboticsDocument3 pagesRoboticsGauravSuryawanshiNo ratings yet
- GTU ROBOTIC ENGINEERING COURSEDocument3 pagesGTU ROBOTIC ENGINEERING COURSERohan DarjiNo ratings yet
- What Are Ya' Doin' in My Swamp?Document1 pageWhat Are Ya' Doin' in My Swamp?;(No ratings yet
- Industrial Robotics Web ReferencesDocument2 pagesIndustrial Robotics Web ReferencesGopinath GangadhariNo ratings yet
- Course Code Course Name Course Category Credits LTPC: ME 427 Robotics OE 3 0 0 3 Unit I: IntroductionDocument1 pageCourse Code Course Name Course Category Credits LTPC: ME 427 Robotics OE 3 0 0 3 Unit I: IntroductionAvvari Likitha . AP19110010171No ratings yet
- Introduction To Industrial RoboticsDocument5 pagesIntroduction To Industrial RoboticsJava TechNo ratings yet
- 17me563 Syll PDFDocument2 pages17me563 Syll PDFDivya SuvarnaNo ratings yet
- Ece218:Basics of Robotics and Automation: Course OutcomesDocument1 pageEce218:Basics of Robotics and Automation: Course OutcomesSanthosh rudriNo ratings yet
- ME407 MechatronicsDocument2 pagesME407 MechatronicsVivek SivaramanNo ratings yet
- ME401 Design of Machine Elements - I.image - MarkedDocument2 pagesME401 Design of Machine Elements - I.image - MarkedShino BabuNo ratings yet
- Mechanical Engineering Department Subject - (Code - Semester - Vi Credit-5 Periods/week (L+T+P) 4-1-0 Total Marks in End Semester-70Document1 pageMechanical Engineering Department Subject - (Code - Semester - Vi Credit-5 Periods/week (L+T+P) 4-1-0 Total Marks in End Semester-70Dr Shubhashis SnyalNo ratings yet
- Robotics EngineeringDocument3 pagesRobotics Engineeringhiren_mistry55No ratings yet
- Robot Course OutlineDocument2 pagesRobot Course OutlineShione T MundawararaNo ratings yet
- 12p602 Robotics and Machine Vision System SyllabusDocument2 pages12p602 Robotics and Machine Vision System Syllabusmskumar_5540% (1)
- Basics of Robotics KTUDocument6 pagesBasics of Robotics KTUBoni SamuelNo ratings yet
- MEE70111 Robotics 3+1: University of Mumbai, Mechanical Engineering (Third and Final Year) Revised Course (Rev-2012)Document2 pagesMEE70111 Robotics 3+1: University of Mumbai, Mechanical Engineering (Third and Final Year) Revised Course (Rev-2012)JIPSON GEORGENo ratings yet
- Bmha303l Industrial-Robotics TH 1.0 0 Bmha303lDocument3 pagesBmha303l Industrial-Robotics TH 1.0 0 Bmha303lForgot PasswordNo ratings yet
- Nptel: Robotics: Advanced Concepts and Analysis - Web CourseDocument9 pagesNptel: Robotics: Advanced Concepts and Analysis - Web CoursekranthiNo ratings yet
- 00 Robotics Lec00Document14 pages00 Robotics Lec00Furkan KirmaciNo ratings yet
- Course Code Course Name L-T-P-Credits Year of Introduction ME407 Mechatronics 3-0-0-3 2016 Prerequisite: Nil Course ObjectivesDocument2 pagesCourse Code Course Name L-T-P-Credits Year of Introduction ME407 Mechatronics 3-0-0-3 2016 Prerequisite: Nil Course ObjectivesAnirudh Madhav KakkadNo ratings yet
- ITM424 Robotic Systems Total Contact Hours-75 Prerequisites Nil Purpose Instructional ObjectivesDocument3 pagesITM424 Robotic Systems Total Contact Hours-75 Prerequisites Nil Purpose Instructional ObjectivesBrittaney BatoNo ratings yet
- Robotics SyllabusDocument2 pagesRobotics SyllabusChaithra 0220No ratings yet
- ME762 Robotics Course OverviewDocument3 pagesME762 Robotics Course OverviewLekha PylaNo ratings yet
- Robotics Course Objectives and ApplicationsDocument5 pagesRobotics Course Objectives and ApplicationsN Dhanunjaya Rao BorraNo ratings yet
- Robotic ManualDocument47 pagesRobotic ManualChhailender Singh BansalNo ratings yet
- DEN408 - DEMM011 Course Info - 2013Document2 pagesDEN408 - DEMM011 Course Info - 2013MadsonNo ratings yet
- Robotics and Artificial IntelligenceDocument3 pagesRobotics and Artificial Intelligenceraumil123No ratings yet
- ME505Document2 pagesME505Gyanesh RaoNo ratings yet
- Robotics Engineering Exam Paper InstructionsDocument2 pagesRobotics Engineering Exam Paper InstructionsSumanAgarwalNo ratings yet
- Robotics R19 Iv Year Sem-IDocument3 pagesRobotics R19 Iv Year Sem-IShubham SomwanshiNo ratings yet
- Course Planner For RoboticsDocument3 pagesCourse Planner For RoboticsSunnyNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Advancements in Robotics and Automation From Theory to PracticeFrom EverandAdvancements in Robotics and Automation From Theory to PracticeNo ratings yet
- 2 Probability Random Process NumericalDocument3 pages2 Probability Random Process NumericalKrishnakumar KattarakunnuNo ratings yet
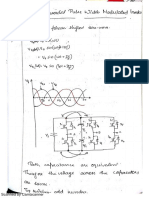
- 3 Phase Sinu PWM InverterDocument4 pages3 Phase Sinu PWM InverterKrishnakumar KattarakunnuNo ratings yet
- 4 ModuleDocument71 pages4 ModuleKrishnakumar KattarakunnuNo ratings yet
- 2.M2 8085 C6 Extended GaonkarDocument80 pages2.M2 8085 C6 Extended GaonkarKrishnakumar KattarakunnuNo ratings yet
- 3 A.connecting DevicesDocument20 pages3 A.connecting DevicesKrishnakumar KattarakunnuNo ratings yet
- 2 Probability Random Process NumericalDocument3 pages2 Probability Random Process NumericalKrishnakumar KattarakunnuNo ratings yet
- Convergence The Future of Health 2016 ReportDocument80 pagesConvergence The Future of Health 2016 ReportKrishnakumar KattarakunnuNo ratings yet
- System Guidlines PDFDocument10 pagesSystem Guidlines PDFSer Hee PaungNo ratings yet
- 3 B AddressingDocument48 pages3 B AddressingKrishnakumar KattarakunnuNo ratings yet
- 3 B AddressingDocument48 pages3 B AddressingKrishnakumar KattarakunnuNo ratings yet
- EC203 Solid State Devices PDFDocument2 pagesEC203 Solid State Devices PDFKrishnakumar KattarakunnuNo ratings yet
- Nagarjuna College Technical Seminar on Fast I/O Technology ThunderboltDocument18 pagesNagarjuna College Technical Seminar on Fast I/O Technology ThunderboltKrishnakumar KattarakunnuNo ratings yet
- Marks I A) Arm. B) of 2 A) B) Motors. 3 A) List B) : KalamDocument2 pagesMarks I A) Arm. B) of 2 A) B) Motors. 3 A) List B) : KalamKrishnakumar KattarakunnuNo ratings yet
- Experience The Advantages of Thunderbolt 4: Unrivaled Simplicity Reliable ConnectivityDocument1 pageExperience The Advantages of Thunderbolt 4: Unrivaled Simplicity Reliable ConnectivityKrishnakumar KattarakunnuNo ratings yet
- BE 1 4 Ktunotes - inDocument119 pagesBE 1 4 Ktunotes - inUpender Rao SunkishalaNo ratings yet
- Bio 1 PDFDocument25 pagesBio 1 PDFSuja jNo ratings yet
- BE M3 Ktunotes - inDocument13 pagesBE M3 Ktunotes - inKrishnakumar KattarakunnuNo ratings yet
- POM Lect NotesDocument5 pagesPOM Lect NotesKrishnakumar KattarakunnuNo ratings yet
- M-GEAR: Gateway-Based Energy-Aware Multi-Hop Routing ProtocolDocument17 pagesM-GEAR: Gateway-Based Energy-Aware Multi-Hop Routing ProtocolNanaji UppeNo ratings yet
- Data Sheet 3VA9988-0AA11: ModelDocument6 pagesData Sheet 3VA9988-0AA11: ModelRurizwan Syahru WibisanaNo ratings yet
- A12 enDocument9 pagesA12 enHever RodriguezNo ratings yet
- MSP432 - Technical Reference Manual - Slau356e PDFDocument817 pagesMSP432 - Technical Reference Manual - Slau356e PDFnemesiqNo ratings yet
- ParkerDocument100 pagesParkermansilla316No ratings yet
- DGP848 Ep09Document52 pagesDGP848 Ep09Vochin LiviuNo ratings yet
- 8155 IitDocument17 pages8155 IitwooDefyNo ratings yet
- B Techpeoples EeDocument4 pagesB Techpeoples Eeravi maheshwariNo ratings yet
- The Effects of DC Machine Adjustment On Loop Balance - Jun 08Document91 pagesThe Effects of DC Machine Adjustment On Loop Balance - Jun 08Rohan ArthurNo ratings yet
- BaiCells mBS1100 Base Station User Manual Setup GuideDocument25 pagesBaiCells mBS1100 Base Station User Manual Setup GuideRamiz3zNo ratings yet
- Color Codes and Irregular MarkingDocument354 pagesColor Codes and Irregular MarkingOscarGonzalezNo ratings yet
- 1n6293 (Superesor Fuente Odu Melodie)Document6 pages1n6293 (Superesor Fuente Odu Melodie)Gabriel RacovskyNo ratings yet
- VRHUNSKA VIDEO OPREMADocument16 pagesVRHUNSKA VIDEO OPREMAaleksandarla3561No ratings yet
- 0716 - DHPV2 - ESF - 400KV GIS - Routine Test Report For CB-New Pole C14-Q0.BDocument12 pages0716 - DHPV2 - ESF - 400KV GIS - Routine Test Report For CB-New Pole C14-Q0.BadnanNo ratings yet
- Agreement Form S6Document5 pagesAgreement Form S6DigitalIndia MentorNo ratings yet
- JERC Manipur Tariff Order 2014-15Document124 pagesJERC Manipur Tariff Order 2014-15Anil KumarNo ratings yet
- 01 Basic Principles For Electric Machine AnalysisDocument65 pages01 Basic Principles For Electric Machine AnalysisArturo Barradas100% (1)
- Data Sheet: D-Series DRM DRM570730Document9 pagesData Sheet: D-Series DRM DRM570730Randy FajardoNo ratings yet
- L700 Antenna DescriptionDocument4 pagesL700 Antenna DescriptionPoobalan MurugeyaNo ratings yet
- 8087 - Math CoprocessorDocument68 pages8087 - Math CoprocessorLohith B M BandiNo ratings yet
- Control System Cabinet AccDocument295 pagesControl System Cabinet Accan doNo ratings yet
- Thomson Catalog CompressedDocument210 pagesThomson Catalog CompressedCharlesNo ratings yet
- Btech Ee 7 Sem Power Generation Economics 2012Document4 pagesBtech Ee 7 Sem Power Generation Economics 2012Abhimanyu AgarwalNo ratings yet
- Ann 4 A Wl1000 Odu He f58 Ida ExtDocument2 pagesAnn 4 A Wl1000 Odu He f58 Ida Extsyrish2622No ratings yet
- Synergy TransformerDocument2 pagesSynergy TransformerKrupal MehtaNo ratings yet