You might also like
- Adept Robot Control Library StartupGuide en 201605 P103-E1-01Document72 pagesAdept Robot Control Library StartupGuide en 201605 P103-E1-01ycemalNo ratings yet
- Mtto. Mecanico P-200 R-J2 PDFDocument324 pagesMtto. Mecanico P-200 R-J2 PDFJaime Flores CaballeroNo ratings yet
- Dokumen - Tips - Fanuc Robotics System R j3 Controller S 430i Series Mechanical Unit Maintenance Manual Marm3s43009801e Rev B PDFDocument4 pagesDokumen - Tips - Fanuc Robotics System R j3 Controller S 430i Series Mechanical Unit Maintenance Manual Marm3s43009801e Rev B PDFMabrouk GuezatiNo ratings yet
- 1cdDocument91 pages1cdJustine Paul RajNo ratings yet
- Checks and Maintenance AM120iC-12LDocument16 pagesChecks and Maintenance AM120iC-12LDaniel GarciaNo ratings yet
- R-30iB Operator Manual TCP OutputDocument5 pagesR-30iB Operator Manual TCP OutputVictor Farias GuerreroNo ratings yet
- EB03642 Paint Robot Cleaning and Covering RecommendationsDocument10 pagesEB03642 Paint Robot Cleaning and Covering Recommendationsgguadian21No ratings yet
- Spot and Motorgun - DX200 - RE-CSO-A046.4 PDFDocument825 pagesSpot and Motorgun - DX200 - RE-CSO-A046.4 PDFBOSCO TECNONo ratings yet
- Servo FloatDocument22 pagesServo FloatMichał MarczakNo ratings yet
- IRVision Operation Manual V7.50Pxx (B-82774EN03)Document14 pagesIRVision Operation Manual V7.50Pxx (B-82774EN03)Duvan TamayoNo ratings yet
- Mechanical Unit Parts (INTERNAL USE ONLY) PDFDocument656 pagesMechanical Unit Parts (INTERNAL USE ONLY) PDFJavii GarciiaNo ratings yet
- Getting Started : With Your TMM5100/470 PINSTAMP Marking SystemDocument8 pagesGetting Started : With Your TMM5100/470 PINSTAMP Marking SystemJhon Parker DimitrinskyNo ratings yet
- Robotmount: Specified Internationally For The New Arc Welding Robot ARC Mate 100icDocument8 pagesRobotmount: Specified Internationally For The New Arc Welding Robot ARC Mate 100icAsrul Arashi IrdianaNo ratings yet
- Motoman Concurrent IoDocument341 pagesMotoman Concurrent IoArmando Rojas0% (1)
- RJ3 Controller RestoreDocument8 pagesRJ3 Controller RestoreSam KarnsNo ratings yet
- Devicenet PDFDocument33 pagesDevicenet PDF13qtparece100% (1)
- M-900iA600 Mechanical Unit Parts Manual (B-82176EN - 01) PDFDocument95 pagesM-900iA600 Mechanical Unit Parts Manual (B-82176EN - 01) PDFfrederic190pNo ratings yet
- M-410iB450 Maintenance Manual (B-81925EN 04)Document194 pagesM-410iB450 Maintenance Manual (B-81925EN 04)Alejandro LedezmaNo ratings yet
- DSQC 328 3hab 7229 1 Robot Module Abb ManualDocument155 pagesDSQC 328 3hab 7229 1 Robot Module Abb ManualCastor RicoNo ratings yet
- LR Mate 200idDocument2 pagesLR Mate 200idKevin ScogginsNo ratings yet
- FANUC ARC Mate 100ic DatasheetDocument1 pageFANUC ARC Mate 100ic DatasheetDieterNo ratings yet
- Fanuc PalletizingDocument2 pagesFanuc PalletizingV2No ratings yet
- R-30iB Linetracking Operator Manual (B-83474EN 01)Document152 pagesR-30iB Linetracking Operator Manual (B-83474EN 01)luca secciNo ratings yet
- YASKAWA NX100 Concurrent IO Manual PDFDocument341 pagesYASKAWA NX100 Concurrent IO Manual PDFRafaelNo ratings yet
- Fanuc SerieDocument56 pagesFanuc SerieMary BelNo ratings yet
- S-420i Robot Maintenance ManualDocument212 pagesS-420i Robot Maintenance ManualAdam ZiobrowskiNo ratings yet
- Software options and features for industrial robotsDocument4 pagesSoftware options and features for industrial robotsDörky LefieuwNo ratings yet
- Tarjeta IO EA Robot FanucDocument3 pagesTarjeta IO EA Robot FanucDracoRodriguezNo ratings yet
- Additional Axis 3HAC021395-001 RevF enDocument218 pagesAdditional Axis 3HAC021395-001 RevF enJose VegaNo ratings yet
- KR 10 R1100-2Document1 pageKR 10 R1100-2Merced HernandezNo ratings yet
- B 83454en 1 - 01 PDFDocument206 pagesB 83454en 1 - 01 PDFROBOTICA PRODISMONo ratings yet
- Fanuc M 900ia SeriesDocument4 pagesFanuc M 900ia SeriesLeonardo AlexNo ratings yet
- Macro Command DXDocument21 pagesMacro Command DXJesus Said Mercado VegaNo ratings yet
- Var PDFDocument812 pagesVar PDFRourkela Fabrications Pvt. Ltd.0% (1)
- FANUC Controller SYSTEM R-30iA I-O Products PDFDocument2 pagesFANUC Controller SYSTEM R-30iA I-O Products PDFUli FloresNo ratings yet
- Paint Mate 200ia Series - 27Document4 pagesPaint Mate 200ia Series - 27countzeroaslNo ratings yet
- R-30iAMate LRHandlingTool UOP AssignmentsDocument9 pagesR-30iAMate LRHandlingTool UOP Assignmentsdenix49100% (1)
- M SeriesDocument47 pagesM SeriesMeet PAtelNo ratings yet
- LR Mate 100 Ibm ManualDocument144 pagesLR Mate 100 Ibm ManualManuel GutierrezNo ratings yet
- J7 Mastering Fixture Asg Overslung Rail - D: 3900 West Hamlin Road Automation Systems Group FANUC Robotics America, IncDocument3 pagesJ7 Mastering Fixture Asg Overslung Rail - D: 3900 West Hamlin Road Automation Systems Group FANUC Robotics America, IncarturoNo ratings yet
- Ma1900 DX100Document79 pagesMa1900 DX100rguzmanabundis100% (2)
- 1 - LRMate100iB Maintenance Manual (B-81595EN - 01)Document144 pages1 - LRMate100iB Maintenance Manual (B-81595EN - 01)molitoriszandor100% (1)
- Alpha5 Smart User S Manual English 24c7 e 0016c PDFDocument636 pagesAlpha5 Smart User S Manual English 24c7 e 0016c PDFBayu S Pribadi100% (1)
- Fanuc DevicNet Printed From EDOCDocument118 pagesFanuc DevicNet Printed From EDOCIbarra AaronNo ratings yet
- Power Wave Observer User Manual Version 3.2fDocument21 pagesPower Wave Observer User Manual Version 3.2fJaime ArreolaNo ratings yet
- Ar1440 Maintenance ManualDocument97 pagesAr1440 Maintenance ManualTechrobotics AutomationNo ratings yet
- ABB IRC5 Controller Software RobotWare 5 6 3HAC022349-001 Rev 2 enDocument110 pagesABB IRC5 Controller Software RobotWare 5 6 3HAC022349-001 Rev 2 enfawad hNo ratings yet
- How To Backup and Restore A Fanuc R-30iB - SkylerH AutomationDocument14 pagesHow To Backup and Restore A Fanuc R-30iB - SkylerH AutomationMerced HernandezNo ratings yet
- iRVision Startup Manual (B-82774EN-3 03) PDFDocument166 pagesiRVision Startup Manual (B-82774EN-3 03) PDFManuel GutierrezNo ratings yet
- Fanuc ARC Mate 100ibe 120ibeDocument4 pagesFanuc ARC Mate 100ibe 120ibeAzimatronics SA de CV100% (1)
- 3HAC043437 PS IRB 1520-En PDFDocument54 pages3HAC043437 PS IRB 1520-En PDFSreema AruviNo ratings yet
- Manual Am-120ic Operator Manual B-82874en 07Document178 pagesManual Am-120ic Operator Manual B-82874en 07JORGENo ratings yet
- Fanuc Arc Mate 100ib M-6ib Maintenance Manual B-81545en-01Document2 pagesFanuc Arc Mate 100ib M-6ib Maintenance Manual B-81545en-01TNasteca100% (1)
- Report On Basic Setups of Fanuc Robot: Difacto Robotics and AutomationDocument5 pagesReport On Basic Setups of Fanuc Robot: Difacto Robotics and AutomationAnil PandeyNo ratings yet
- VersaBell II Replacement PartsDocument1 pageVersaBell II Replacement PartsJuanCarlosLopezRuizNo ratings yet
- R-J3 Option Payload ID B-80944EN-01Document10 pagesR-J3 Option Payload ID B-80944EN-01zganonNo ratings yet
- BookDocument2 pagesBookharry desaiNo ratings yet
- POLYSTOPP PE System DN90-200 Data Sheets - Nov2020Document12 pagesPOLYSTOPP PE System DN90-200 Data Sheets - Nov2020MORELLI silvioNo ratings yet
- 924-K e 930-K EletricoDocument4 pages924-K e 930-K EletricoRodrigo100% (3)
- Diagrama 323D3Document2 pagesDiagrama 323D3Plstina RamsNo ratings yet
- Processware Manual: SpotwareDocument54 pagesProcessware Manual: SpotwareXanti Zabala Da RosaNo ratings yet
- ConfirmationDocument2 pagesConfirmationtatankiseNo ratings yet
- Processware Manual: SpotwareDocument54 pagesProcessware Manual: SpotwareXanti Zabala Da RosaNo ratings yet
- IRB 2600产品资料 PDFDocument396 pagesIRB 2600产品资料 PDFtatankiseNo ratings yet
- Application Manual: Lincoln Arclink Interface and Weld EditorDocument44 pagesApplication Manual: Lincoln Arclink Interface and Weld EditortatankiseNo ratings yet
- The State of New Hampshire: Judicial BranchDocument3 pagesThe State of New Hampshire: Judicial BranchtatankiseNo ratings yet
- Software Install V5 X XDocument23 pagesSoftware Install V5 X XtatankiseNo ratings yet
- SSA 2000 Manipulator Manual: Motoman NX100 ControllerDocument80 pagesSSA 2000 Manipulator Manual: Motoman NX100 ControllertatankiseNo ratings yet
- DX100 Maintenance Manual 2 PDFDocument728 pagesDX100 Maintenance Manual 2 PDFAbhishank BhardwajNo ratings yet
- Klubermatic Lubricant DispensersDocument13 pagesKlubermatic Lubricant Dispenserstatankise100% (1)
- SSA 2000 Manipulator Manual: Motoman NX100 ControllerDocument80 pagesSSA 2000 Manipulator Manual: Motoman NX100 ControllertatankiseNo ratings yet
- ATG6 QR 2 HDocument510 pagesATG6 QR 2 HAymen ZammaliNo ratings yet
- UntitledDocument292 pagesUntitledIsmaelNo ratings yet
- The State of New Hampshire: Judicial BranchDocument1 pageThe State of New Hampshire: Judicial BranchtatankiseNo ratings yet
- HoleriteDocument1 pageHoleritetatankiseNo ratings yet
- KR 5 arc: versatile robot for welding and moreDocument4 pagesKR 5 arc: versatile robot for welding and moreAn Nisa100% (1)
- Yaskawa Motoman robot and grease guideDocument9 pagesYaskawa Motoman robot and grease guidetatankiseNo ratings yet
- S3 M93 Manual PDFDocument203 pagesS3 M93 Manual PDFgs100% (1)
- Reset TpabbDocument1 pageReset TpabbtatankiseNo ratings yet
- Reset TpabbDocument1 pageReset TpabbtatankiseNo ratings yet
- En Cat RV PDFDocument122 pagesEn Cat RV PDFCosmina Anna MNo ratings yet
- WDM D9R PTDocument2 pagesWDM D9R PTRendy PratamaNo ratings yet
- 30 Common 4L60E Transmission ProblemsDocument4 pages30 Common 4L60E Transmission ProblemsJorge Pires100% (5)
- AC Motor and Servo Driver Configuration and Parameter ListDocument37 pagesAC Motor and Servo Driver Configuration and Parameter ListJean GrimNo ratings yet
- Model APS-57E Table of Contents:: Installation Manual Keyless Entry and Remote Start SystemDocument24 pagesModel APS-57E Table of Contents:: Installation Manual Keyless Entry and Remote Start Systemmaria gonzalezNo ratings yet
- INCENTIVIZED ENCONDocument22 pagesINCENTIVIZED ENCONSatbir SinghNo ratings yet
- Ben Shaw Aluminium Worldskills UK CNC Milling 2014 Test Project As Machined A3Document1 pageBen Shaw Aluminium Worldskills UK CNC Milling 2014 Test Project As Machined A3gundhiufsNo ratings yet
- Multi Purpose MachineDocument14 pagesMulti Purpose MachineKrishna Mouli Kasimi82% (17)
- RBE Series Motors Brochure en-US 2003 1Document44 pagesRBE Series Motors Brochure en-US 2003 1Animesh GhoshNo ratings yet
- SPN Mot-edc17-Bosch v01 4025Document6 pagesSPN Mot-edc17-Bosch v01 4025qusayabuqamarNo ratings yet
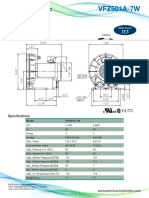
- Fuji Electric VFZ501A 7W DatasheetDocument2 pagesFuji Electric VFZ501A 7W Datasheetghmp123No ratings yet
- The Light Machine Shop Divided Into The Following SectionDocument5 pagesThe Light Machine Shop Divided Into The Following Sectionyogendra singhNo ratings yet
- Honda Goldwing 1800 Service ManualDocument3 pagesHonda Goldwing 1800 Service ManualTyson17% (6)
- Functions of The GovernorDocument5 pagesFunctions of The GovernoribnuharyNo ratings yet
- Belarus 80.1 - 80.2 - 82.1 - 82.2 - 82P - ENG - Manual PDFDocument143 pagesBelarus 80.1 - 80.2 - 82.1 - 82.2 - 82P - ENG - Manual PDFUmar ShamsudinNo ratings yet
- Diagrama 1 ELECTRONICSDocument1 pageDiagrama 1 ELECTRONICSAlejandro Quiñones VelazquezNo ratings yet
- GT4M-2000 Mec. Manual V1.0.0-1Document276 pagesGT4M-2000 Mec. Manual V1.0.0-1Cung Manh TuanNo ratings yet
- BiggerBook PDFDocument146 pagesBiggerBook PDFJovan MitrevskiNo ratings yet
- Dp09-8210-503 Vc11 Tunnel Valve Control PanelDocument14 pagesDp09-8210-503 Vc11 Tunnel Valve Control Panelphankhoa83No ratings yet
- FAG bearing suffixes guide internal design, dimensions & featuresDocument18 pagesFAG bearing suffixes guide internal design, dimensions & featuresmahmoud mohamedNo ratings yet
- Hydrodynamic Drive Unit - 2Document28 pagesHydrodynamic Drive Unit - 2Senthil Muthu Kumar TNo ratings yet
- DEF STAN 02-113 Issue 2 Dec 2010.Document64 pagesDEF STAN 02-113 Issue 2 Dec 2010.CeciliaNo ratings yet
- Manual Servicio Yamaha BT1100 Bulldog 2005Document117 pagesManual Servicio Yamaha BT1100 Bulldog 2005L67% (3)
- Manual de Despiece Honda Tool 125 PDFDocument118 pagesManual de Despiece Honda Tool 125 PDFMaria dolores100% (2)
- Explotacion de Pozos Con PCP en Yacimiento DiademaDocument23 pagesExplotacion de Pozos Con PCP en Yacimiento DiademadesckenNo ratings yet
- CatalogDocument57 pagesCatalogIvan MontaoNo ratings yet
- Not For Reproduction: Illustrated Parts List 356400Document28 pagesNot For Reproduction: Illustrated Parts List 356400moisesNo ratings yet
- MR-S Kit InstallationDocument15 pagesMR-S Kit InstallationRayseanKangNo ratings yet
- Part I - NFPA 20 - Chapter 14 Acceptance Testing, Performance, and MaintenanceDocument1 pagePart I - NFPA 20 - Chapter 14 Acceptance Testing, Performance, and MaintenancechylergNo ratings yet
- Piston, Rotary and Manual Pumps For Drums - Grease Gun: Model FR 112Document2 pagesPiston, Rotary and Manual Pumps For Drums - Grease Gun: Model FR 112Đen BáoNo ratings yet
- Tuning Your Yamaha FZ 16 Carburetor for Better Performance & Fuel EconomyDocument8 pagesTuning Your Yamaha FZ 16 Carburetor for Better Performance & Fuel Economyckw30571100% (2)