You might also like
- Information Symposium Measurement and Control Techniques in Rolling: Luxembourg, 2 and 3 September 1981From EverandInformation Symposium Measurement and Control Techniques in Rolling: Luxembourg, 2 and 3 September 1981No ratings yet
- Tabletop CNC Wire Bender Machine Using DXF by Generating CNC CodesDocument4 pagesTabletop CNC Wire Bender Machine Using DXF by Generating CNC CodesPrasanna RahmaniacNo ratings yet
- 16-24 Press Brake ManualDocument8 pages16-24 Press Brake ManualJoel BecherNo ratings yet
- Technical Specifications of MOTI-30-3NC Busbar MachineDocument26 pagesTechnical Specifications of MOTI-30-3NC Busbar MachineycemalNo ratings yet
- High Speed Z Purlin MachineDocument6 pagesHigh Speed Z Purlin MachineChris RishbinNo ratings yet
- Band Saw Machine InstructionsDocument10 pagesBand Saw Machine Instructionsvarvaroi100% (1)
- 1, U&M PPC - Draft From DalmecDocument55 pages1, U&M PPC - Draft From Dalmecbách hà100% (2)
- Honor Seiki VTL Heavy DutyDocument16 pagesHonor Seiki VTL Heavy DutyCNC SYSTEMSNo ratings yet
- LT1424Document20 pagesLT1424octaviocamachoNo ratings yet
- Evans Equipment SheetDocument4 pagesEvans Equipment SheetSBARNES1966No ratings yet
- SchulerDocument8 pagesSchuleraguswNo ratings yet
- Du Dub PDFDocument55 pagesDu Dub PDFSURESH100% (1)
- Circular Saw Machines: Amada Machine Tools EuropeDocument8 pagesCircular Saw Machines: Amada Machine Tools Europebuva034No ratings yet
- Permaglide Glijlagers LRDocument76 pagesPermaglide Glijlagers LRVitor GodoyNo ratings yet
- Davi-MCA - FOUR ROLLDocument8 pagesDavi-MCA - FOUR ROLLبازرگانی راهیان کار و دانشNo ratings yet
- Kinkelder StandardDocument24 pagesKinkelder StandardJason StephensNo ratings yet
- Advanced Punching MachineDocument57 pagesAdvanced Punching MachineJAYAPRABHAKARAN N NNo ratings yet
- 2010 PBT e InternetDocument20 pages2010 PBT e InternetMohammed RiyazNo ratings yet
- STARTFIRE SF 2100C ManualDocument63 pagesSTARTFIRE SF 2100C ManualKarthick MNo ratings yet
- Hydraulic Rod Bending MachineDocument14 pagesHydraulic Rod Bending Machinek.santhosh kumar50% (2)
- Opening, Dosing and Sorting Systems, Mixing and Conditioning Units, Stationary ShreddersDocument43 pagesOpening, Dosing and Sorting Systems, Mixing and Conditioning Units, Stationary ShreddersAhmed AbdulnaimNo ratings yet
- Long Series Power Collet ChucksDocument1 pageLong Series Power Collet ChucksSchneider S TamilNo ratings yet
- Wire Bending MachineDocument32 pagesWire Bending MachineAditya Brid100% (1)
- Sprintcut PDFDocument5 pagesSprintcut PDFpruthiviraj13100% (1)
- Motor Torque Calculation: Lead Screw Drive LoadsDocument5 pagesMotor Torque Calculation: Lead Screw Drive LoadsTruta IonutNo ratings yet
- Datasheet ModEvaPac en V2.3Document6 pagesDatasheet ModEvaPac en V2.3eki miftakhul firdausNo ratings yet
- PlateRolls PDFDocument20 pagesPlateRolls PDFgabisaNo ratings yet
- Index: SR - NO. Topics NODocument21 pagesIndex: SR - NO. Topics NOSharath SuriNo ratings yet
- High Speed Double Head Wing Machine V3Document2 pagesHigh Speed Double Head Wing Machine V3Sanjeev GholapNo ratings yet
- Blechumformung Progressive Die Broschuere Mechanical Presses S Series UsDocument12 pagesBlechumformung Progressive Die Broschuere Mechanical Presses S Series UsSurjeet KumarNo ratings yet
- AIDA StandardsDocument10 pagesAIDA StandardsJoice_JohnNo ratings yet
- Design of Ultraprecision Machine Tools With Applications To Manufacture of Miniature and Micro Components PDFDocument14 pagesDesign of Ultraprecision Machine Tools With Applications To Manufacture of Miniature and Micro Components PDFAUSTIN DSOUZANo ratings yet
- SewDocument396 pagesSewVarun SanganiNo ratings yet
- Operation Manual for Wire Forming Machine (NER3D-3(1.5-12.7MMDocument38 pagesOperation Manual for Wire Forming Machine (NER3D-3(1.5-12.7MMgustavo100% (1)
- Design and Mechanisn of Internal Gear PumpDocument13 pagesDesign and Mechanisn of Internal Gear PumpabhairulzNo ratings yet
- A-313 - 98Document7 pagesA-313 - 98José Ramón GutierrezNo ratings yet
- Design Guidelines - Spot Welding ChapterDocument11 pagesDesign Guidelines - Spot Welding ChapterJoel BrasilBorgesNo ratings yet
- Safety - Msr131rtpDocument2 pagesSafety - Msr131rtpJose Hilario Rivera RezaNo ratings yet
- Pneumatic Auto Feed Sheet Cutting MachineDocument5 pagesPneumatic Auto Feed Sheet Cutting MachineVigneshwaran Srinivasan100% (1)
- Boschert: CNC Busbar Cutting - Punching - Bending SolutionDocument42 pagesBoschert: CNC Busbar Cutting - Punching - Bending SolutiondemdiinNo ratings yet
- Shaping Machine GuideDocument25 pagesShaping Machine GuidevinayakNo ratings yet
- ISO 2093 - Tin PlatingDocument10 pagesISO 2093 - Tin PlatingPA KARTHEESNo ratings yet
- 96 Rotary Encoder HN38-06-N PDFDocument2 pages96 Rotary Encoder HN38-06-N PDFPK KNo ratings yet
- SKF Linear BushDocument60 pagesSKF Linear BushAwdhesh Singh Bhadoriya100% (1)
- Static and Kinetic Friction CoefficientsDocument6 pagesStatic and Kinetic Friction Coefficientsgio_flores_4No ratings yet
- DRO-General ENG Feb 09 PDFDocument16 pagesDRO-General ENG Feb 09 PDFZahirul Huq100% (1)
- CNC Machine Controller Using STEP-NCDocument6 pagesCNC Machine Controller Using STEP-NCLuis Enrique CorzoNo ratings yet
- 1082 DDocument21 pages1082 DbilsaitNo ratings yet
- Quotation For Cut To Length Line 25x2500Document13 pagesQuotation For Cut To Length Line 25x2500gourav sarafNo ratings yet
- 3 Roll Plate Bending MachinesDocument8 pages3 Roll Plate Bending MachinescuerporigidoNo ratings yet
- F162X Digital Arc Voltage Controller ManualDocument64 pagesF162X Digital Arc Voltage Controller ManualPandegaNo ratings yet
- 09MME020 Design and Analysis of 500 MT Wagon CarDocument79 pages09MME020 Design and Analysis of 500 MT Wagon CarJitendra PatelNo ratings yet
- EnTechProductCat MC IDocument25 pagesEnTechProductCat MC Iinammurad12No ratings yet
- CNC Machining CentreDocument5 pagesCNC Machining CentreaaqibaminNo ratings yet
- Plasma CamDocument20 pagesPlasma CamkairotdfNo ratings yet
- Husky 515Document36 pagesHusky 515diray100% (1)
- Chapter 3Document19 pagesChapter 3Waiwai soeNo ratings yet
- Obstacle Avoiding Robot Lab Project ReportDocument27 pagesObstacle Avoiding Robot Lab Project Reportyaswanth yashuNo ratings yet
- Build a Variable Speed DC Motor Control System Using ArduinoDocument18 pagesBuild a Variable Speed DC Motor Control System Using ArduinoPoonam GuptaNo ratings yet
- CNC by SourabhDocument7 pagesCNC by SourabhsaurabhNo ratings yet
- BMW Engine: Studtent Name: 1.fakher 2.fasil 3Document12 pagesBMW Engine: Studtent Name: 1.fakher 2.fasil 3Fakher AlrashidNo ratings yet
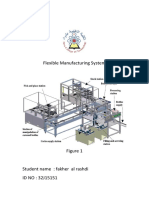
- Flexible Manufacturing SystemDocument10 pagesFlexible Manufacturing SystemFakher AlrashidNo ratings yet
- Bmwslides Powerpointpresentation 170819084953Document22 pagesBmwslides Powerpointpresentation 170819084953Memo RosalesNo ratings yet
- PumpsDocument26 pagesPumpsFakher AlrashidNo ratings yet
- Flexible Manufacturing Systems: Done By:.Document6 pagesFlexible Manufacturing Systems: Done By:.Fakher AlrashidNo ratings yet
- Module 33 Solution Endurance LimitDocument1 pageModule 33 Solution Endurance LimitWolf LordNo ratings yet
- Valves Guide: Types, Parts & OperationDocument83 pagesValves Guide: Types, Parts & OperationFakher AlrashidNo ratings yet
- BMW Engine: Studtent Name: 1.fakher 2.fasil 3Document12 pagesBMW Engine: Studtent Name: 1.fakher 2.fasil 3Fakher AlrashidNo ratings yet
- Module 15 Solution Axial and Torsional Stress ReviewDocument2 pagesModule 15 Solution Axial and Torsional Stress ReviewWolf Lord100% (1)
- QuestionDocument3 pagesQuestionFakher AlrashidNo ratings yet
- Machine Element Mechanical Design Second Moment of Area GuideDocument1 pageMachine Element Mechanical Design Second Moment of Area GuideWolf LordNo ratings yet
- Flexible Manufacturing Systems: Done By:.Document6 pagesFlexible Manufacturing Systems: Done By:.Fakher AlrashidNo ratings yet
- Worksheet 5 Solution SN Curve Practice ProblemDocument2 pagesWorksheet 5 Solution SN Curve Practice ProblemWolf LordNo ratings yet
- Randomly Varying Stresses Miner's RuleDocument3 pagesRandomly Varying Stresses Miner's RuleWolf Lord100% (1)
- Coursera Quiz 4 PDFDocument8 pagesCoursera Quiz 4 PDFMiriam OntiverosNo ratings yet
- Virtual Industrial Visit Report on Thermal Cycling ManufacturingDocument6 pagesVirtual Industrial Visit Report on Thermal Cycling ManufacturingFakher AlrashidNo ratings yet
- BMW Engine: Studtent Name: 1.fakher 2.fasil 3Document12 pagesBMW Engine: Studtent Name: 1.fakher 2.fasil 3Fakher AlrashidNo ratings yet
- BMW Engine: Studtent Name: 1.fakher 2.fasil 3Document12 pagesBMW Engine: Studtent Name: 1.fakher 2.fasil 3Fakher AlrashidNo ratings yet
- Virtual Industrial Visit Report on Thermal Cycling ManufacturingDocument6 pagesVirtual Industrial Visit Report on Thermal Cycling ManufacturingFakher AlrashidNo ratings yet
- Flexible Manufacturing Systems: Done By:.Document6 pagesFlexible Manufacturing Systems: Done By:.Fakher AlrashidNo ratings yet
- OJT Training OJT TrainingDocument54 pagesOJT Training OJT TrainingFakher AlrashidNo ratings yet
- Cómo hacer un comunicador Bluetooth de Star TrekDocument40 pagesCómo hacer un comunicador Bluetooth de Star TrekeeindustrialNo ratings yet
- AhlCleaner RB 300 HD - en EOMDocument24 pagesAhlCleaner RB 300 HD - en EOMcuongNo ratings yet
- SMART UF70 Troubleshooting DiagramDocument35 pagesSMART UF70 Troubleshooting DiagramtroykitoNo ratings yet
- LX450 FSM PDFDocument320 pagesLX450 FSM PDFJuan MourizNo ratings yet
- SAW - Tractor 1000 NewDocument2 pagesSAW - Tractor 1000 NewFebriono AdiNo ratings yet
- Control Solutions: Q8 High-Performance H.I.L. Control BoardDocument2 pagesControl Solutions: Q8 High-Performance H.I.L. Control BoardMonowar HasanNo ratings yet
- Special CablesDocument115 pagesSpecial Cablesjav071No ratings yet
- FINAL INSPECTION CHECK SHEET Maru A 01-02-2021Document6 pagesFINAL INSPECTION CHECK SHEET Maru A 01-02-2021Ulfsaar KhanNo ratings yet
- ARM Lab QuestionsDocument2 pagesARM Lab QuestionsAravind VinasNo ratings yet
- Manual Masterpact NT800Document52 pagesManual Masterpact NT800eduranddecassisNo ratings yet
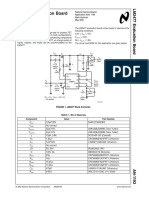
- LM3477 Evaluation Board: National Semiconductor Application Note 1193 Mark Hartman May 2001Document5 pagesLM3477 Evaluation Board: National Semiconductor Application Note 1193 Mark Hartman May 2001lennon rNo ratings yet
- Kabel Nyy Supreme LV PVC CableDocument5 pagesKabel Nyy Supreme LV PVC CableHerman Saputra100% (2)
- Automatic MotorBike Stand Slider 2020Document16 pagesAutomatic MotorBike Stand Slider 2020abhishek100% (2)
- Prado - Merú SeDocument940 pagesPrado - Merú SeMauricio Montaño Rodriguez100% (3)
- Japan Ground Self Defence Force Tyoe73t TruckDocument2 pagesJapan Ground Self Defence Force Tyoe73t TruckArvie HabayNo ratings yet
- 1SFC132057M0201Document104 pages1SFC132057M0201Y.a. Ooi100% (1)
- FC-6 Operation ManualDocument4 pagesFC-6 Operation ManualbigdrsmithNo ratings yet
- WDZ-5211 Line Protection Measurement and Control Device 1 Device Function 2 Protection Function and PrincipleDocument17 pagesWDZ-5211 Line Protection Measurement and Control Device 1 Device Function 2 Protection Function and PrincipleCorey PorterNo ratings yet
- Product Data Sheet: Earth-Leakage Relay RH10M - 30 Ma - 240 VDocument3 pagesProduct Data Sheet: Earth-Leakage Relay RH10M - 30 Ma - 240 VDarwin LibrandaNo ratings yet
- Electrical Instrument PDFDocument6 pagesElectrical Instrument PDFLonghuynh LêNo ratings yet
- The PG1 Gearbox - Demystifying The Codes and RatiosDocument8 pagesThe PG1 Gearbox - Demystifying The Codes and Ratioshagleyr5638No ratings yet
- F3 Efr1Document2 pagesF3 Efr1saravananNo ratings yet
- CCM FMCSA Chassis Inspection FormDocument1 pageCCM FMCSA Chassis Inspection Formido4self100% (1)
- HBW-115 T5: Industrial Range Open SkidDocument6 pagesHBW-115 T5: Industrial Range Open SkidJoanCarlesLLopysNo ratings yet
- Vario GT 24: The Variable Girder Wall Formwork SystemDocument3 pagesVario GT 24: The Variable Girder Wall Formwork SystemLaw Chee SeongNo ratings yet
- 32-Segment CMOS LCD Driver: Features Pin ConfigurationDocument11 pages32-Segment CMOS LCD Driver: Features Pin ConfigurationluinksNo ratings yet
- ArticleDocument7 pagesArticlengô quânNo ratings yet
- 16xe1 Digital RadioDocument6 pages16xe1 Digital RadioJorge BalzaNo ratings yet
- TK-C920/TK-C921 (A) : Important SafeguardsDocument2 pagesTK-C920/TK-C921 (A) : Important Safeguardsbestbest07No ratings yet
- Heat Exchanger Checklist As Per TEMADocument6 pagesHeat Exchanger Checklist As Per TEMAsathish_iyengar88% (8)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Complete Electronics Self-Teaching Guide with ProjectsFrom EverandComplete Electronics Self-Teaching Guide with ProjectsRating: 3 out of 5 stars3/5 (2)
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Power Quality in Power Systems and Electrical MachinesFrom EverandPower Quality in Power Systems and Electrical MachinesRating: 4.5 out of 5 stars4.5/5 (11)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Winning in 2025: Digital and Data Transformation: The Keys to SuccessFrom EverandWinning in 2025: Digital and Data Transformation: The Keys to SuccessNo ratings yet