You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- CT-160-1993 Armónicos Aguas Arriba de Rectificadores de Una UPS (ENGLISH)Document20 pagesCT-160-1993 Armónicos Aguas Arriba de Rectificadores de Una UPS (ENGLISH)jaroldane1000No ratings yet
- Research On The Load Model and Characteristics of Inverter-Fed Motors For Transiet Stability AnalysisDocument6 pagesResearch On The Load Model and Characteristics of Inverter-Fed Motors For Transiet Stability Analysisjaroldane1000No ratings yet
- Modeling of Voltage Characteristics of Variable Frequency Motor and Comparison With IMDocument8 pagesModeling of Voltage Characteristics of Variable Frequency Motor and Comparison With IMjaroldane1000No ratings yet
- Modelling, Simulation and Monitoring of IM For EMU TrainDocument6 pagesModelling, Simulation and Monitoring of IM For EMU Trainjaroldane1000No ratings yet
- Dynamic Behavior of A Doubly Fed Motor Generator During and After The FaultDocument6 pagesDynamic Behavior of A Doubly Fed Motor Generator During and After The Faultjaroldane1000No ratings yet
- Induction Motor Modelling and Interfacing Technique For Fasta Transiet Stability SimulationDocument4 pagesInduction Motor Modelling and Interfacing Technique For Fasta Transiet Stability Simulationjaroldane1000No ratings yet
- Windaq SoftwareDocument52 pagesWindaq Softwarejaroldane1000No ratings yet
- ISO 55001 - Practical Implementation Guide Asset Management System PDFDocument176 pagesISO 55001 - Practical Implementation Guide Asset Management System PDFjaroldane1000No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Aerodynamics - Principle of FlightDocument14 pagesAerodynamics - Principle of Flightchikita putriNo ratings yet
- Cantilever Retaining Walls - An Overview of The Design ProcessDocument4 pagesCantilever Retaining Walls - An Overview of The Design ProcessSergiu GraurNo ratings yet
- API 579-2 - 13.1 Rev1Document50 pagesAPI 579-2 - 13.1 Rev1osbertodiaz100% (2)
- Savonius-Wind-Turbine - PBLDocument20 pagesSavonius-Wind-Turbine - PBLRitesh DeshmukhNo ratings yet
- KTR Magnetic Coupling CatalogDocument10 pagesKTR Magnetic Coupling CatalogHyungTae JangNo ratings yet
- 24 M Trawler Outline SpecDocument22 pages24 M Trawler Outline SpecGraham WestbrookNo ratings yet
- "Big Red": Taylor Industrial Truck Preliminary SpecificationsDocument4 pages"Big Red": Taylor Industrial Truck Preliminary SpecificationsNeil DesaiNo ratings yet
- Garlock GYLON Style 3545 Spec Sheet - (NA) 2016-12 EN PDFDocument1 pageGarlock GYLON Style 3545 Spec Sheet - (NA) 2016-12 EN PDFalan2003_1_29040No ratings yet
- H.W - 3 MCQ : Multiple Choice QuestionDocument2 pagesH.W - 3 MCQ : Multiple Choice QuestionJohnNo ratings yet
- Bus Bar Sizing Calcs - Substation and Switchboard - ExamplesDocument15 pagesBus Bar Sizing Calcs - Substation and Switchboard - ExamplesAchint Kumar100% (1)
- ProblemSession1 2024Document2 pagesProblemSession1 2024s2038163No ratings yet
- Dugard X5 Five Axis Vertical Machining Centre: Ex-Demo Price - 110,000Document1 pageDugard X5 Five Axis Vertical Machining Centre: Ex-Demo Price - 110,000Laurentiu ZavodNo ratings yet
- CFC 11 Halon 2402Document5 pagesCFC 11 Halon 2402Bhupender RamchandaniNo ratings yet
- Parts Catalogue: CD DeluxeDocument52 pagesParts Catalogue: CD DeluxeJonathan FiquitivaNo ratings yet
- UtmDocument7 pagesUtmMirza Aqeel AhmedNo ratings yet
- PHYS 431 Problem Set 01 PDFDocument2 pagesPHYS 431 Problem Set 01 PDFMazhar ShahzadNo ratings yet
- Minor Pipe Losses (Equivalent Lengths)Document4 pagesMinor Pipe Losses (Equivalent Lengths)Hassan AbdulAzim FadilNo ratings yet
- Fluid MechanicsDocument2 pagesFluid MechanicsLokendra Singh JhalaNo ratings yet
- Lab Report Pump PerformanceDocument20 pagesLab Report Pump Performanceamirshafiq67% (3)
- CME 3303 HW 6 Solution PDFDocument4 pagesCME 3303 HW 6 Solution PDFrum kaunNo ratings yet
- Astm C597 09Document2 pagesAstm C597 09Saber AlsidNo ratings yet
- Voith-IPS High-Pressure Internal Gear PumpDocument20 pagesVoith-IPS High-Pressure Internal Gear Pumpjuan camilo gutierrezNo ratings yet
- Noise and Vibration From Railway Vehicles: David Thompson and Chris JonesDocument47 pagesNoise and Vibration From Railway Vehicles: David Thompson and Chris JonesVICTOR HUGO ORTIZ MOSCOSONo ratings yet
- 120CU20 ManualDocument228 pages120CU20 ManualVăn Tuấn NguyễnNo ratings yet
- Ficha Tecnica SentronicDocument14 pagesFicha Tecnica SentronicKarolay VelitoNo ratings yet
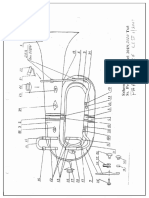
- Tuba Chertezh 202 Tuba PartDocument7 pagesTuba Chertezh 202 Tuba PartMikkoNo ratings yet
- GR14 Copy EC08Document14 pagesGR14 Copy EC08Edison GonsalvesNo ratings yet
- MANUAL MAQUINA DESMONTADORA TC221-229 - PartslistDocument28 pagesMANUAL MAQUINA DESMONTADORA TC221-229 - PartslistJessika JaimesNo ratings yet
- Cit Inline Check Valve Catalogue Yuken IndiaDocument2 pagesCit Inline Check Valve Catalogue Yuken IndiaJayesh PrajapatiNo ratings yet
- ASD Vs LRFDDocument107 pagesASD Vs LRFDgreenwalletNo ratings yet