You might also like
- Model Based Systems Engineering For Aircraft Systems - How DoesDocument9 pagesModel Based Systems Engineering For Aircraft Systems - How DoesAlmas QasimNo ratings yet
- Discrete Event SimulationDocument140 pagesDiscrete Event Simulationssfofo100% (1)
- ITAR Export ControlDocument26 pagesITAR Export ControlcoralonsoNo ratings yet
- Object-Oriented Technology and Computing Systems Re-EngineeringFrom EverandObject-Oriented Technology and Computing Systems Re-EngineeringNo ratings yet
- g5 - Tmax - Test - Pattern - Validation - User Guide PDFDocument286 pagesg5 - Tmax - Test - Pattern - Validation - User Guide PDFHARISH DAMARLANo ratings yet
- Ieee PapersDocument8 pagesIeee PapersAtit PatelNo ratings yet
- Oracle Tablespace GuideDocument29 pagesOracle Tablespace GuideJSNo ratings yet
- Railway Management SystemDocument30 pagesRailway Management Systemrkjrocks0% (2)
- Design and Simulation of Component-Based Manufacturing Machine SystemsDocument20 pagesDesign and Simulation of Component-Based Manufacturing Machine SystemsMosharraf HossainNo ratings yet
- A Scalable Synthesis Methodology For Application-Specific ProcessorsDocument14 pagesA Scalable Synthesis Methodology For Application-Specific ProcessorsMurali PadalaNo ratings yet
- Paper 6 BlastDocument10 pagesPaper 6 BlastMammita NtabaNo ratings yet
- 1 s2.0 S0045790623002276 MainDocument22 pages1 s2.0 S0045790623002276 MainRayan ElazzabiNo ratings yet
- A Formal Approach To Distributed System TestsDocument10 pagesA Formal Approach To Distributed System Testskalayu yemaneNo ratings yet
- Bio-Inspired Imprecise ComputationalDocument13 pagesBio-Inspired Imprecise ComputationalJohn Leons E100% (1)
- A Versatile Demonstrator For Distributed RealDocument4 pagesA Versatile Demonstrator For Distributed Realpriyanka1229No ratings yet
- Parallelizing SystemC Kernel For Fast Hardware Simulation On SMP MachinesDocument8 pagesParallelizing SystemC Kernel For Fast Hardware Simulation On SMP MachinesNguyen Tuan AnhNo ratings yet
- Requirements Specification For Process-Control SysDocument25 pagesRequirements Specification For Process-Control Sysk c tomNo ratings yet
- HW/SW Cosimulation Survey of Techniques and ToolsDocument51 pagesHW/SW Cosimulation Survey of Techniques and ToolsMiltonNo ratings yet
- Tarea1 Lara GarcíaDocument5 pagesTarea1 Lara GarcíalaramecaNo ratings yet
- F S: A Fast, Configurable Memory-Reliability Simulator For Conventional and 3D-Stacked SystemsDocument24 pagesF S: A Fast, Configurable Memory-Reliability Simulator For Conventional and 3D-Stacked SystemsnanozordprimeNo ratings yet
- ICSE MW Camera ReadyDocument10 pagesICSE MW Camera ReadyasrNo ratings yet
- Esl 20 EvolutionDocument46 pagesEsl 20 EvolutionprkabzxqtfvdhmttwuNo ratings yet
- DEMES SimulMag2011 v4Document8 pagesDEMES SimulMag2011 v4GWNo ratings yet
- DEMES modeling methodology for simulating embedded systemsDocument9 pagesDEMES modeling methodology for simulating embedded systemsasdf9834No ratings yet
- VLSI Design FlowDocument10 pagesVLSI Design Flowuday93No ratings yet
- A Model Based Approach To Workflow Management Using Knowledge GraphsDocument32 pagesA Model Based Approach To Workflow Management Using Knowledge GraphsRakshit MittalNo ratings yet
- Cadence SimDocument34 pagesCadence Simsanjayr_nittNo ratings yet
- EE 668: System Design: Madhav P. Desai January 18, 2011Document3 pagesEE 668: System Design: Madhav P. Desai January 18, 2011Chiquita WhiteNo ratings yet
- Mentorpaper 3Document9 pagesMentorpaper 3Ibrahim AtitoNo ratings yet
- A Component Agent Based Open CAD System For Collaborative DesignDocument15 pagesA Component Agent Based Open CAD System For Collaborative DesignScientiapotentiaestNo ratings yet
- Embedded Systems Software Architecture Challenges and SolutionsDocument2 pagesEmbedded Systems Software Architecture Challenges and SolutionsHeriberto AguirreNo ratings yet
- Energy-Aware Distributed Simulation For Mobile Platforms: An Empirical StudyDocument21 pagesEnergy-Aware Distributed Simulation For Mobile Platforms: An Empirical StudyFahad MaqboolNo ratings yet
- Introduction To VLSI SystemDocument16 pagesIntroduction To VLSI SystemPrabakaran RajendranNo ratings yet
- 1 s2.0 S0167739X15003362 MainDocument18 pages1 s2.0 S0167739X15003362 MaingmgaargiNo ratings yet
- A Framework For The Engineering of Reliable Distributed SystemsDocument8 pagesA Framework For The Engineering of Reliable Distributed Systemssurendiran123No ratings yet
- An Object-Oriented and Executable Sysml Framework For Rapid Model DevelopmentDocument10 pagesAn Object-Oriented and Executable Sysml Framework For Rapid Model Developmentrahul.srivastavaNo ratings yet
- A Brief Overview On Modeling and Simulation SoftwareDocument7 pagesA Brief Overview On Modeling and Simulation SoftwareAli Ghalehban - علی قلعه بانNo ratings yet
- A Top-Down Microsystems Design Methodology and Associated ChallengesDocument5 pagesA Top-Down Microsystems Design Methodology and Associated ChallengesVamsi ReddyNo ratings yet
- Support For End-to-End Response-Time and Delay Analysis in The Industrial Tool Suite: Issues, Experiences and A Case StudyDocument30 pagesSupport For End-to-End Response-Time and Delay Analysis in The Industrial Tool Suite: Issues, Experiences and A Case StudyManoj Kumar PanigrahyNo ratings yet
- Tutorials: A1 System Level Specification Beyond RTLDocument4 pagesTutorials: A1 System Level Specification Beyond RTLRahul MehtaNo ratings yet
- J04 - Ladder20diagram20and20Petri Net Based20discrete Event20control20design20methodsDocument10 pagesJ04 - Ladder20diagram20and20Petri Net Based20discrete Event20control20design20methodsAldin BeganovicNo ratings yet
- Overcoming Computational Errors in Sensing Platforms Through Embedded Machine-Learning KernelsDocument12 pagesOvercoming Computational Errors in Sensing Platforms Through Embedded Machine-Learning KernelsctorreshhNo ratings yet
- Se 2012Document94 pagesSe 2012Asad AbbasiNo ratings yet
- Model-Based Design Automation of Hard-Ware/Software Co-Designs For Xilinx Zynq PsocsDocument8 pagesModel-Based Design Automation of Hard-Ware/Software Co-Designs For Xilinx Zynq PsocsMouna elamariNo ratings yet
- Adaptação ModeloDocument16 pagesAdaptação ModeloDouglas ACNo ratings yet
- Work?: International Test Conference PaperDocument2 pagesWork?: International Test Conference PaperTom MathewNo ratings yet
- Preface: PurposeDocument5 pagesPreface: PurposeHarish BheemaiahNo ratings yet
- Orchestrated Platform For Cyber-Physical SystemsDocument26 pagesOrchestrated Platform For Cyber-Physical SystemsJexiaNo ratings yet
- Electronic System-Level Synthesis MethodologiesDocument6 pagesElectronic System-Level Synthesis MethodologiesAdip ChyNo ratings yet
- Science China Information Sciences: Mingzhen LI, Yi Liu, Bangduo CHEN, Hailong YANG, Zhongzhi LUAN & Depei QIANDocument19 pagesScience China Information Sciences: Mingzhen LI, Yi Liu, Bangduo CHEN, Hailong YANG, Zhongzhi LUAN & Depei QIANBoul chandra GaraiNo ratings yet
- EDA for Cyber-Physical Systems DesignDocument2 pagesEDA for Cyber-Physical Systems DesignSamarjit ChakrabortyNo ratings yet
- Scheduled Dataflow: Execution Paradigm, Architecture, and Performance EvaluationDocument13 pagesScheduled Dataflow: Execution Paradigm, Architecture, and Performance EvaluationssfofoNo ratings yet
- Efficient Protocol Design Flow For Embedded SystemsDocument235 pagesEfficient Protocol Design Flow For Embedded Systemsal_mi_moNo ratings yet
- 4-Bit Processing Unit Design Usingvhdl Structural Modeling For Multiprocessor ArchitectureDocument6 pages4-Bit Processing Unit Design Usingvhdl Structural Modeling For Multiprocessor ArchitectureArpan AdakNo ratings yet
- lecture 2 (Parallelism)Document7 pageslecture 2 (Parallelism)hussiandavid26No ratings yet
- OOP-MSVS-NRM-GSDocument28 pagesOOP-MSVS-NRM-GSVishnu R PuthusseryNo ratings yet
- Grid2005 NBCR SoaDocument8 pagesGrid2005 NBCR Soaxico107No ratings yet
- Incremental REACTION 2014Document7 pagesIncremental REACTION 2014ali M.HNo ratings yet
- Test SocDocument133 pagesTest SocjeevithaNo ratings yet
- Real-Time Implementation of Low-Cost University Satellite 3-Axis Attitude Determination and Control SystemDocument10 pagesReal-Time Implementation of Low-Cost University Satellite 3-Axis Attitude Determination and Control SystemivosyNo ratings yet
- Embedded Systems Design Challenge Conference PaperDocument16 pagesEmbedded Systems Design Challenge Conference PaperAbd ANo ratings yet
- Embed DesignDocument9 pagesEmbed Designjanakiram473No ratings yet
- Merz Florian PDFDocument220 pagesMerz Florian PDFcoralonso100% (1)
- Contract Annexes A-E - U PDFDocument463 pagesContract Annexes A-E - U PDFcoralonsoNo ratings yet
- Text 2008 10 30 Systeme 2006 PDFDocument17 pagesText 2008 10 30 Systeme 2006 PDFcoralonsoNo ratings yet
- The Belly Fairing: Ofthea380Document29 pagesThe Belly Fairing: Ofthea380coralonsoNo ratings yet
- Icf Final Report - Epa 2017 Aircraft Co2 Cost Assessment - 2018-09-30 PDFDocument103 pagesIcf Final Report - Epa 2017 Aircraft Co2 Cost Assessment - 2018-09-30 PDFcoralonsoNo ratings yet
- 0930 - Panunzio PDFDocument22 pages0930 - Panunzio PDFcoralonsoNo ratings yet
- Systems Engineering: - A Model Based ApproachDocument38 pagesSystems Engineering: - A Model Based ApproachcoralonsoNo ratings yet
- NLD-MAR-145 AMC-GM Version 1.0 PDFDocument120 pagesNLD-MAR-145 AMC-GM Version 1.0 PDFcoralonsoNo ratings yet
- File Utility Program (FUP) Reference Manual: 523323-012 October 2009Document321 pagesFile Utility Program (FUP) Reference Manual: 523323-012 October 2009coralonsoNo ratings yet
- Transaction Processing SystemsDocument20 pagesTransaction Processing SystemsgallodonNo ratings yet
- Asset-V1 MITProfessionalX+SysEngxB2+1T2017+type@asset+block@C2 Week4 ProjectDocument9 pagesAsset-V1 MITProfessionalX+SysEngxB2+1T2017+type@asset+block@C2 Week4 ProjectcoralonsoNo ratings yet
- Main Processing Module - Case Study PDFDocument7 pagesMain Processing Module - Case Study PDFcoralonsoNo ratings yet
- Children & Young People Emotional Wellbeing Service Surrey County Council (SCC)Document54 pagesChildren & Young People Emotional Wellbeing Service Surrey County Council (SCC)coralonsoNo ratings yet
- MOD Acronyms and Abbreviations PDFDocument402 pagesMOD Acronyms and Abbreviations PDFnileshraneNo ratings yet
- Systems Engineering For Commercial Aircraft: A Domain-Specific Adaptation, Second EditionDocument9 pagesSystems Engineering For Commercial Aircraft: A Domain-Specific Adaptation, Second EditioncoralonsoNo ratings yet
- Appendix T Design Reviews For Developmental Systems PDFDocument16 pagesAppendix T Design Reviews For Developmental Systems PDFcoralonsoNo ratings yet
- UCMethodologyDocument49 pagesUCMethodologycoralonsoNo ratings yet
- Advanced Avionics Handbook - FAA-H-8083-6 - Federal Aviation Administration - Google Books PDFDocument47 pagesAdvanced Avionics Handbook - FAA-H-8083-6 - Federal Aviation Administration - Google Books PDFcoralonsoNo ratings yet
- My Usability PresentationDocument30 pagesMy Usability PresentationcoralonsoNo ratings yet
- Accreditation Report Title PageDocument11 pagesAccreditation Report Title PagecoralonsoNo ratings yet
- Rapport 2007-28 PDFDocument110 pagesRapport 2007-28 PDFcoralonsoNo ratings yet
- (EICD-S3) - (ngEO-13-ICD-DLR-067) - (External ICD For Sentinel-3) - (v1.4) PDFDocument47 pages(EICD-S3) - (ngEO-13-ICD-DLR-067) - (External ICD For Sentinel-3) - (v1.4) PDFcoralonsoNo ratings yet
- V&V Plan Title PageDocument13 pagesV&V Plan Title PagecoralonsoNo ratings yet
- MIS Light Management Information System en PDFDocument2 pagesMIS Light Management Information System en PDFcoralonsoNo ratings yet
- European Air Traffic Management - Principles, Practice and Research - Google Books PDFDocument23 pagesEuropean Air Traffic Management - Principles, Practice and Research - Google Books PDFcoralonsoNo ratings yet
- V&V Report Title PageDocument12 pagesV&V Report Title PagecoralonsoNo ratings yet
- Text 2008 10 30 Systeme 2006 PDFDocument17 pagesText 2008 10 30 Systeme 2006 PDFcoralonsoNo ratings yet
- Processing Center: Optimat ABD 100Document2 pagesProcessing Center: Optimat ABD 100coralonsoNo ratings yet
- ITCE 314 Lab Report 6Document7 pagesITCE 314 Lab Report 6Amna AzmatNo ratings yet
- Getting Hardware Information Using Visual BasicDocument9 pagesGetting Hardware Information Using Visual BasicZaeni Marjiyanto, A.mdNo ratings yet
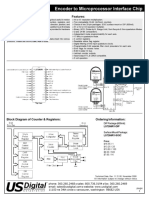
- Encoder To Microprocessor Interface Chip Chip: Features: DescriptionDocument6 pagesEncoder To Microprocessor Interface Chip Chip: Features: DescriptionserviciobsasNo ratings yet
- Power Theft ReportDocument62 pagesPower Theft ReportRamalingam Shanmugam0% (2)
- Ericsson RNC PresentationDocument12 pagesEricsson RNC Presentationlove2honney100% (2)
- Final Term Paper Mobile Application Development - TheoryDocument3 pagesFinal Term Paper Mobile Application Development - TheoryUmair AzizNo ratings yet
- Blue Planet Software Suite: Network Transformation at The Speed of BusinessDocument3 pagesBlue Planet Software Suite: Network Transformation at The Speed of BusinessHMNo ratings yet
- Electrical Engineering Laboratory I Course Code: Ece501Document9 pagesElectrical Engineering Laboratory I Course Code: Ece501Nur Hidayatudeen Iman SukirmanNo ratings yet
- You Have A Database That Is Experiencing Deadlock Issues When Users Run QueriesDocument3 pagesYou Have A Database That Is Experiencing Deadlock Issues When Users Run QueriesbharatNo ratings yet
- Oracle® Secure Backup Administrator's GuideDocument328 pagesOracle® Secure Backup Administrator's GuidebillydumpNo ratings yet
- Technical Application: Tv-Based InstructionDocument26 pagesTechnical Application: Tv-Based InstructionDsignPrintNo ratings yet
- Web Security Vulnerabilities ExplainedDocument10 pagesWeb Security Vulnerabilities ExplainedNadeem MalikNo ratings yet
- !!!tacho Universal!!!Document9 pages!!!tacho Universal!!!anyersantiNo ratings yet
- SpiderCloud OS (SCOS) CLI User Guide Release 3.1Document80 pagesSpiderCloud OS (SCOS) CLI User Guide Release 3.1Hector SolarteNo ratings yet
- 400-151 Exam Dumps With PDF and VCE Download (1-20)Document6 pages400-151 Exam Dumps With PDF and VCE Download (1-20)valliappan alNo ratings yet
- CreoView 4 - 0 Installation Guide PDFDocument120 pagesCreoView 4 - 0 Installation Guide PDFJean AbelaNo ratings yet
- SavannaDocument148 pagesSavannadileepNo ratings yet
- SWITCH BDCOM S2508B Hardware Installation ManualDocument20 pagesSWITCH BDCOM S2508B Hardware Installation ManualHarry Chan Putra. SP. MTCNA. MTCTCE. MTCRENo ratings yet
- AIS Simkin ch10Document54 pagesAIS Simkin ch10SuhardhitaNo ratings yet
- ISO ToolsDocument7 pagesISO Toolsavveen4002No ratings yet
- Lluvia de Plata y Otras NoticiasDocument5 pagesLluvia de Plata y Otras NoticiasLara PalacioNo ratings yet
- NS300 Installation Manual PDFDocument300 pagesNS300 Installation Manual PDFEdmar Joves AberinNo ratings yet
- Computer SportDocument2 pagesComputer SportKhaerul QuNo ratings yet
- LEKIN - Automated Scheduling SoftwareDocument5 pagesLEKIN - Automated Scheduling SoftwareChintya Komala SariNo ratings yet
- 06 e CommerceDocument14 pages06 e CommerceShailesh SrivastavNo ratings yet
- Kit For The 12F675 Book PDFDocument29 pagesKit For The 12F675 Book PDFCelso Silva SivaNo ratings yet
- 811 826Document16 pages811 826Alvaro Ginestar RodriguezNo ratings yet
- It 601 PPPTTTTTTTTTTT FinalllllllDocument20 pagesIt 601 PPPTTTTTTTTTTT Finallllllljohncena9999No ratings yet