You might also like
- Esm-48100b1 v300r007c01 User ManualDocument56 pagesEsm-48100b1 v300r007c01 User ManualAndy WooNo ratings yet
- CIPS ISP Application Education Plus Experience RouteDocument9 pagesCIPS ISP Application Education Plus Experience Routekashyap_thakerNo ratings yet
- DevOps Course Module - RahulDocument7 pagesDevOps Course Module - RahulShare KhannaNo ratings yet
- Semantic WebDocument125 pagesSemantic WebTariq NaeemNo ratings yet
- Tenth Class Model Paper: Public Examinations - 2019 English Paper - IDocument3 pagesTenth Class Model Paper: Public Examinations - 2019 English Paper - IVamsiNo ratings yet
- Classical Detection and Estimation Theory.Document13 pagesClassical Detection and Estimation Theory.ksank43No ratings yet
- M.J.P. Rohilkhand University, Bareilly: Tentative Examination Schedule Even SemesterDocument1 pageM.J.P. Rohilkhand University, Bareilly: Tentative Examination Schedule Even SemesterShubham saxenaNo ratings yet
- Engineering Mathematics IIDocument3 pagesEngineering Mathematics IISai KiranNo ratings yet
- Dha CorrectionsDocument715 pagesDha Correctionsmohamad kansoNo ratings yet
- Lecture 4 PDFDocument169 pagesLecture 4 PDFYash Sunil AhirraoNo ratings yet
- Today: ASV 2.2 (Bayes' Rule) ASV 2.3 (Independence) : Lecture B00 (Nemish) Lecture C00 (Au)Document10 pagesToday: ASV 2.2 (Bayes' Rule) ASV 2.3 (Independence) : Lecture B00 (Nemish) Lecture C00 (Au)Tyler ScottNo ratings yet
- Design and Implementation of A Compact Double Ridged Horn Antenna For Ultra-Wide Band Microwave ImagingDocument2 pagesDesign and Implementation of A Compact Double Ridged Horn Antenna For Ultra-Wide Band Microwave ImagingMirani RasheedNo ratings yet
- Skill 3 Students PDFDocument114 pagesSkill 3 Students PDFLưu Quang HiếuNo ratings yet
- Course Petri Net BOSS2S4Document19 pagesCourse Petri Net BOSS2S4TheLastArchivistNo ratings yet
- NumpybasicsDocument13 pagesNumpybasicsshivpoojanrajpoot741No ratings yet
- Principia Politica PDFDocument18 pagesPrincipia Politica PDFNaassom Vaz100% (1)
- Key AnswersDocument4 pagesKey AnswersKim Reyes BalenNo ratings yet
- A Bayesian Inference Theory of AttentionDocument36 pagesA Bayesian Inference Theory of AttentionsharatscNo ratings yet
- 4 Uov Revisited 05192023Document57 pages4 Uov Revisited 05192023jbsNo ratings yet
- Vision-Feature Extraction Topics: Pattern Recognition For Vision Fall 2004Document25 pagesVision-Feature Extraction Topics: Pattern Recognition For Vision Fall 2004angela velasquezNo ratings yet
- AML All Merged PDF Class 9 To 16Document327 pagesAML All Merged PDF Class 9 To 16lakshman.haldarNo ratings yet
- Cours IHM M2 5 2013Document83 pagesCours IHM M2 5 2013tabaquiNo ratings yet
- Urban Design & Data: Roy Lin Aug.3 2013 Code For TomorrowDocument48 pagesUrban Design & Data: Roy Lin Aug.3 2013 Code For TomorrowOvan DanielNo ratings yet
- ChatGPT With Reinforcment LearningDocument71 pagesChatGPT With Reinforcment Learningaegr82No ratings yet
- Code 13Document108 pagesCode 13digital tavernNo ratings yet
- Plane Amien To 08 Autor 1Document5 pagesPlane Amien To 08 Autor 1Jose VPNo ratings yet
- Music Interpretation Analysis A Multimodal ApproacDocument198 pagesMusic Interpretation Analysis A Multimodal ApproacabrilfelixYTNo ratings yet
- Anotasi JurnalDocument24 pagesAnotasi JurnalLiesNo ratings yet
- Cinematic Storytelling - SummaryDocument3 pagesCinematic Storytelling - SummaryWagner NogueiraNo ratings yet
- Mody Natasha 2018 Mdes Digf ThesisDocument59 pagesMody Natasha 2018 Mdes Digf ThesisFilip ChmielewskiNo ratings yet
- Neural Networks: 10-601B Introduction To Machine LearningDocument78 pagesNeural Networks: 10-601B Introduction To Machine LearningNitaNo ratings yet
- sssc2011 Friedland Multimedia 01Document62 pagessssc2011 Friedland Multimedia 01jajNo ratings yet
- Malhotra Mr05 PPT 23Document17 pagesMalhotra Mr05 PPT 23ABHISHEK CHAKRABORTYNo ratings yet
- Thesis Schedule 17-18Document1 pageThesis Schedule 17-18dev adityaNo ratings yet
- Mobility Data: Modeling, Management, and Understanding: Tutorial, October 26, 2010, TorontoDocument59 pagesMobility Data: Modeling, Management, and Understanding: Tutorial, October 26, 2010, TorontoStefano SpaccapietraNo ratings yet
- Design For 4D Printing - Rapidly Exploring The Design Space Around Smart MaterialsDocument6 pagesDesign For 4D Printing - Rapidly Exploring The Design Space Around Smart MaterialsGermain SOSSOUNo ratings yet
- Duty ListDocument3 pagesDuty Listapi-19905641No ratings yet
- AML Assignment 2Document7 pagesAML Assignment 2vandanabksNo ratings yet
- Is A NFT Just A Pyramid Scheme - Google SearchDocument1 pageIs A NFT Just A Pyramid Scheme - Google SearchkazNo ratings yet
- Matteo Fontana PortfolioDocument25 pagesMatteo Fontana PortfolioMatteo FontanaNo ratings yet
- Inverse Design of Photonic and Phononic TopologicaDocument16 pagesInverse Design of Photonic and Phononic Topologicamanendra lakraNo ratings yet
- Marine Robotics ModelingDocument83 pagesMarine Robotics ModelingsettembrinimatteoNo ratings yet
- Physics Class 11Document2 pagesPhysics Class 11ahmadmajpv2No ratings yet
- 2018 5 TH SemDocument15 pages2018 5 TH SemmonuNo ratings yet
- Challenges in ML&DMDocument12 pagesChallenges in ML&DMsachinNo ratings yet
- Capital Asset Pricing ModelDocument7 pagesCapital Asset Pricing ModelALNo ratings yet
- These Graph Match PDFDocument214 pagesThese Graph Match PDFnidhalNo ratings yet
- Detailed Advertisement01062020Document8 pagesDetailed Advertisement01062020ashalizajohnNo ratings yet
- Discrete Mathematics Course SyllabusDocument3 pagesDiscrete Mathematics Course SyllabusashalizajohnNo ratings yet
- Latest Government Job Notification 2020Document15 pagesLatest Government Job Notification 2020ashalizajohnNo ratings yet
- Maveli Selling Rate - March 2022Document2 pagesMaveli Selling Rate - March 2022ashalizajohnNo ratings yet
- Portable Document Format (PDF), Standardized As ISO 32000, Is ADocument4 pagesPortable Document Format (PDF), Standardized As ISO 32000, Is AashalizajohnNo ratings yet
- Learning Goals Lesson Plans and Logic: Rex PageDocument11 pagesLearning Goals Lesson Plans and Logic: Rex PageashalizajohnNo ratings yet
- Scalable Face Image Retrieval With Identity-Based Quantization and Multi-Reference Re-RankingDocument8 pagesScalable Face Image Retrieval With Identity-Based Quantization and Multi-Reference Re-RankingashalizajohnNo ratings yet
- To Find Out Temporary & Junk Files, Follow The Steps Below:: Step 1Document3 pagesTo Find Out Temporary & Junk Files, Follow The Steps Below:: Step 1ashalizajohnNo ratings yet
- IntroductionDocument33 pagesIntroductionashalizajohnNo ratings yet
- What Are Junk FilesDocument2 pagesWhat Are Junk FilesashalizajohnNo ratings yet
- IJISA Sted PDFDocument7 pagesIJISA Sted PDFashalizajohnNo ratings yet
- AttachmentDocument75 pagesAttachmentashalizajohnNo ratings yet
- Object Tracking Using High Resolution Satellite ImageryDocument15 pagesObject Tracking Using High Resolution Satellite ImageryashalizajohnNo ratings yet
- Ijmecs V4 N3 7 PDFDocument7 pagesIjmecs V4 N3 7 PDFashalizajohnNo ratings yet
- Not 0042020 0592020Document3 pagesNot 0042020 0592020ashalizajohnNo ratings yet
- Discrete MathDocument120 pagesDiscrete MathashalizajohnNo ratings yet
- Extra Ordinary Gazette Date: 03.08.2020 LAST DATE: 09.09.2020 CATEGORY NO: 35/2020Document3 pagesExtra Ordinary Gazette Date: 03.08.2020 LAST DATE: 09.09.2020 CATEGORY NO: 35/2020ashalizajohnNo ratings yet
- A Variable-Resolution Probabilistic Three-Dimensional Model For Change DetectionDocument12 pagesA Variable-Resolution Probabilistic Three-Dimensional Model For Change DetectionashalizajohnNo ratings yet
- Semifragile Watermarking Schemes For Image Authentication-A SurveyDocument7 pagesSemifragile Watermarking Schemes For Image Authentication-A SurveyashalizajohnNo ratings yet
- Discrete Math2Document13 pagesDiscrete Math2ashalizajohnNo ratings yet
- Digital Signature AlgorithmDocument18 pagesDigital Signature AlgorithmashalizajohnNo ratings yet
- Fast Spatio-Temporal Data Mining of Large Geophysical DatasetsDocument6 pagesFast Spatio-Temporal Data Mining of Large Geophysical DatasetsashalizajohnNo ratings yet
- Soil Classification and Crop Recommendation SystemDocument4 pagesSoil Classification and Crop Recommendation SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 8-To-1-Line 74LS151 MultiplexerDocument4 pages8-To-1-Line 74LS151 MultiplexersandhiyaaNo ratings yet
- ICSS To WHCP 13 Sequence OPEN-CLOSE PDFDocument4 pagesICSS To WHCP 13 Sequence OPEN-CLOSE PDFCường Đặng ViếtNo ratings yet
- QG To IT Audit 9.1Document81 pagesQG To IT Audit 9.1Rhad EstoqueNo ratings yet
- Manual of The Orgone Condensation UnitDocument4 pagesManual of The Orgone Condensation UnitArq Francisco Melgar FlNo ratings yet
- Application Software BODAS-drive eDA: FeaturesDocument28 pagesApplication Software BODAS-drive eDA: FeaturesOHW SERNo ratings yet
- Product Data Sheet: Redundant Power Supply Module X80 - 100..240 V AC - SafetyDocument3 pagesProduct Data Sheet: Redundant Power Supply Module X80 - 100..240 V AC - SafetyHernán GiorgettiNo ratings yet
- Results: 2021 Canadian Championships DH - KHMRDocument9 pagesResults: 2021 Canadian Championships DH - KHMRMatthew PioroNo ratings yet
- Chapter 1 Introduction: CSI161 Introduction To Computing (Lecture 4.2) Digital LogicDocument37 pagesChapter 1 Introduction: CSI161 Introduction To Computing (Lecture 4.2) Digital LogicOffie MphaleNo ratings yet
- (T-KUBGKE-B) M2 - Introduction To Containers and Kubernetes - ILT v1.7Document74 pages(T-KUBGKE-B) M2 - Introduction To Containers and Kubernetes - ILT v1.7Atul SharmaNo ratings yet
- 3D Kinematic Scheme With 3DExperienceDocument21 pages3D Kinematic Scheme With 3DExperienceWhatSoAverNo ratings yet
- RRL and RRSDocument2 pagesRRL and RRSKurt Yee Amante100% (1)
- GPS Trackmaker PRODocument2 pagesGPS Trackmaker PROCarlos IrineuNo ratings yet
- Computational Geometry With Independent and Dependent Uncertainties - GitikDocument160 pagesComputational Geometry With Independent and Dependent Uncertainties - GitikJuan RodriguezNo ratings yet
- 889DF8AB5Document2 pages889DF8AB5Alexis Yomara Roque SantosNo ratings yet
- Thesis Paper Computer ScienceDocument9 pagesThesis Paper Computer Sciencegbwygt8n100% (2)
- Cypress Tips and TricksDocument11 pagesCypress Tips and TricksVelammal .MNo ratings yet
- Analyzing M&E Data: Chapter at A GlanceDocument18 pagesAnalyzing M&E Data: Chapter at A GlanceRoqueNo ratings yet
- ARIS - Migrating SAP ProjectsDocument28 pagesARIS - Migrating SAP ProjectsAlberto R. Pérez MartínNo ratings yet
- Battle Mages - Sign of Darkness - Manual - PCDocument48 pagesBattle Mages - Sign of Darkness - Manual - PCmab58No ratings yet
- H.K.E Society's: "Smart Irrigation Control System"Document23 pagesH.K.E Society's: "Smart Irrigation Control System"balaji xeroxNo ratings yet
- Standard Format For Final Year Project Report For ECE DepartmentDocument11 pagesStandard Format For Final Year Project Report For ECE DepartmentSileshNo ratings yet
- Reviewer Ict-Entrepreneurship 6Document2 pagesReviewer Ict-Entrepreneurship 6Dark MagilNo ratings yet
- DataDocument13 pagesDataJournal teamNo ratings yet
- Eis RevisedDocument9 pagesEis RevisedMuhammad FarazNo ratings yet
- Deep Learning-Based Analysis of A Real-Time Voice Cloning SystemDocument6 pagesDeep Learning-Based Analysis of A Real-Time Voice Cloning SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
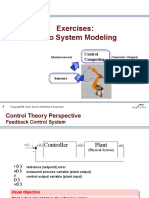
- Hybrid Systems ServoSystemExerciseDocument13 pagesHybrid Systems ServoSystemExerciseSreerag V NNo ratings yet