You might also like
- Electronic Circuit Design (December 2016)Document65 pagesElectronic Circuit Design (December 2016)Qasim LodhiNo ratings yet
- Linear Integrated CircuitsDocument178 pagesLinear Integrated CircuitsdhaaminiNo ratings yet
- Fundamentals of Electric Circuits 7th Edition by Charles K. AlexanderDocument50 pagesFundamentals of Electric Circuits 7th Edition by Charles K. Alexandersaad.azzahraniNo ratings yet
- 100 Top Operational Amplifiers Questions and Answers PDF Operational Amplifiers Questions and AnswersDocument12 pages100 Top Operational Amplifiers Questions and Answers PDF Operational Amplifiers Questions and AnswersSharanya50% (2)
- Jeff Bezos' Evil Master PlanDocument1 pageJeff Bezos' Evil Master Plan666userNo ratings yet
- Separation in 2014 Oilfield Operations - Myths Vs RealityDocument25 pagesSeparation in 2014 Oilfield Operations - Myths Vs Realitymglsite1100% (1)
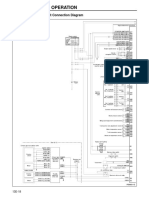
- Structure and Operation: 3. Electronic Control Unit Connection DiagramDocument24 pagesStructure and Operation: 3. Electronic Control Unit Connection DiagramAung Hlaing Min Myanmar100% (1)
- 7SD522 Standard Calculation Format 1567726645 PDFDocument12 pages7SD522 Standard Calculation Format 1567726645 PDFAli AkbarNo ratings yet
- Operational AmplifierDocument24 pagesOperational AmplifierSead ArifagićNo ratings yet
- Fundamentals of Mixed Signals and Sensors Learning Module 1 FINAL by CORVERADocument47 pagesFundamentals of Mixed Signals and Sensors Learning Module 1 FINAL by CORVERAAdrianne Bastasa100% (5)
- Lesson Plan ClocksDocument3 pagesLesson Plan Clocksapi-300472292100% (2)
- L&D HeadsDocument5 pagesL&D HeadsSobhonNo ratings yet
- Ficha TecnicaDocument2 pagesFicha TecnicaAllende Fretel CarhuasNo ratings yet
- Introduction To Operational Amplifiers and CharacteristicsDocument17 pagesIntroduction To Operational Amplifiers and CharacteristicsvallepuvannuruNo ratings yet
- Design and Simulation Op Amp IntegratoDocument5 pagesDesign and Simulation Op Amp IntegratodianseptyaNo ratings yet
- Op-Amp - Industrial ApplicationsDocument57 pagesOp-Amp - Industrial ApplicationsNikita ShakyaNo ratings yet
- Instrumentation AmplifierDocument6 pagesInstrumentation Amplifiersarpanch100% (2)
- Operational Amplifier: Aeronaves y LaboratorioDocument3 pagesOperational Amplifier: Aeronaves y LaboratorioAngel FerreyraNo ratings yet
- Operational Amplifiers Basics, Characteristics, Types and ApplicationsDocument14 pagesOperational Amplifiers Basics, Characteristics, Types and ApplicationsSanjay BalwaniNo ratings yet
- Design Op-Amp 1Document5 pagesDesign Op-Amp 1Suyog DhakneNo ratings yet
- QuintoLeslieAnnT Research1Document13 pagesQuintoLeslieAnnT Research1Leslie Ann QuintoNo ratings yet
- Notes 3Document5 pagesNotes 3Joshika sri Ram prabhuNo ratings yet
- OpampDocument2 pagesOpampHarsh SinghNo ratings yet
- OpAmp IntroDocument7 pagesOpAmp IntroTony StarkNo ratings yet
- Instrumentation AmplifierDocument6 pagesInstrumentation AmplifierMHM MahinNo ratings yet
- Sample ObjectiveDocument5 pagesSample ObjectiveAssini HussainNo ratings yet
- Sboa092b PDFDocument94 pagesSboa092b PDFBelayneh TadesseNo ratings yet
- EE 306 - Electrical Engineering LaboratoryDocument6 pagesEE 306 - Electrical Engineering LaboratoryMohammed KhouliNo ratings yet
- Basic Electrical Engineering Lab Group Members: - Fatima - Ur-Rehman (015) - URWADocument2 pagesBasic Electrical Engineering Lab Group Members: - Fatima - Ur-Rehman (015) - URWATalha MughalNo ratings yet
- EE62 Lab 2 - JEFFER N. FALLARCUNADocument5 pagesEE62 Lab 2 - JEFFER N. FALLARCUNAJeffer FallarcunaNo ratings yet
- Literature Review of Operational AmplifierDocument5 pagesLiterature Review of Operational Amplifierea6p1e99100% (1)
- Design and Layout of 1.8V Two Stage CMOS Operational Amplifier (Unbuffered)Document5 pagesDesign and Layout of 1.8V Two Stage CMOS Operational Amplifier (Unbuffered)sudarshan poojaryNo ratings yet
- 100 Top Operational Amplifiers Questions and Answers PDF Operational Amplifiers Questions and Answers 1 PDF FreeDocument12 pages100 Top Operational Amplifiers Questions and Answers PDF Operational Amplifiers Questions and Answers 1 PDF FreeJuan Carlos Chamalé Morales100% (1)
- Eee-V-linear Ics and Applications (10ee56) - NotesDocument132 pagesEee-V-linear Ics and Applications (10ee56) - NotesSai Prasanna JandhyalaNo ratings yet
- AEI505Document13 pagesAEI505api-26787131No ratings yet
- 2020 SEO Operational Amplifiers r1.0Document6 pages2020 SEO Operational Amplifiers r1.0Okiring JonahNo ratings yet
- Major ProjectDocument28 pagesMajor ProjectNeeraj MishraNo ratings yet
- Abstract - : 2.1.pin Configuration and OperationDocument3 pagesAbstract - : 2.1.pin Configuration and OperationPranao NakulNo ratings yet
- Indian Institute of Technology Ropar Electrical Engineering DepartmentDocument4 pagesIndian Institute of Technology Ropar Electrical Engineering DepartmentNikhil SainiNo ratings yet
- Penguat Op Amp Inverting Op Amp Dan Non Inverting Op AmpDocument45 pagesPenguat Op Amp Inverting Op Amp Dan Non Inverting Op AmpAnonymous sXlxD6so7No ratings yet
- WWW Facstaff Bucknell Edu Mastascu ElessonsHTML OpAmps OpAmpDocument7 pagesWWW Facstaff Bucknell Edu Mastascu ElessonsHTML OpAmps OpAmpYesrno ToyouNo ratings yet
- Operational Transconductance Amplifier: OperationDocument12 pagesOperational Transconductance Amplifier: OperationRAJESH REDDY KAKARLANo ratings yet
- Linear and Digital IC Applications - UNIT-1Document55 pagesLinear and Digital IC Applications - UNIT-1Dr. Ajay Kumar Kushwaha ECENo ratings yet
- Scientech 2323 Op Amp ApplicationsDocument1 pageScientech 2323 Op Amp ApplicationsZaid AhmadNo ratings yet
- Research Paper On AmplifierDocument5 pagesResearch Paper On Amplifiereh1dvt0m100% (1)
- Opamp Real Characteristics: Daniel Andres Hernandez Ramirez (Cod:201620011600)Document8 pagesOpamp Real Characteristics: Daniel Andres Hernandez Ramirez (Cod:201620011600)daniel go “danielG08”No ratings yet
- Ecen 457-1-2010Document19 pagesEcen 457-1-2010get2lightNo ratings yet
- Amplifiers: From Ideal To Real: VoltageDocument10 pagesAmplifiers: From Ideal To Real: Voltagekaushal4053No ratings yet
- Slidesgo Maximizing Efficiency Exploring The Applications of OperationDocument13 pagesSlidesgo Maximizing Efficiency Exploring The Applications of Operationqgs8ly3jhoNo ratings yet
- Applied Electronics II (Chapter 3)Document46 pagesApplied Electronics II (Chapter 3)Ermias MesfinNo ratings yet
- Design Differentiator Circuit Using OP-AMP LargeDocument18 pagesDesign Differentiator Circuit Using OP-AMP Largeamit davaNo ratings yet
- Learning Objectives:: Topic 1.4.1 - Op-Amp CharacteristicsDocument9 pagesLearning Objectives:: Topic 1.4.1 - Op-Amp CharacteristicsArnav KushwahaNo ratings yet
- 4.1 Opamps Introduction The Ideal AmplifierDocument2 pages4.1 Opamps Introduction The Ideal Amplifierlizhi0007No ratings yet
- Electric EnginerrDocument15 pagesElectric EnginerrMohammad NamiqNo ratings yet
- Company Profile: LCR Bridge, Conductivity Bridge Etc. However, During Last Nearly 46 Years The Product MixDocument58 pagesCompany Profile: LCR Bridge, Conductivity Bridge Etc. However, During Last Nearly 46 Years The Product Mixuatulkar100% (1)
- L 23 28 OPAMP 2019 Final Sent - CleanedDocument44 pagesL 23 28 OPAMP 2019 Final Sent - CleanedakhilNo ratings yet
- Department of Electrical & Electronics EngineeringDocument1 pageDepartment of Electrical & Electronics Engineeringeshwar_worldNo ratings yet
- Power Amplifier Design ThesisDocument6 pagesPower Amplifier Design Thesisdwm7sa8p100% (1)
- LicaDocument215 pagesLicaEnoch TonyNo ratings yet
- EC6303 - Linear Integrated Circuits and Applications NotesDocument132 pagesEC6303 - Linear Integrated Circuits and Applications NotesbrsreddyNo ratings yet
- IC 741 Op-Amp Tutorial and CharacteristicsDocument5 pagesIC 741 Op-Amp Tutorial and CharacteristicsBenNo ratings yet
- Report About Operational Amplifiers 32020245Document6 pagesReport About Operational Amplifiers 32020245mohamedmohamedahmed172No ratings yet
- Difference Between Op-Amp and ComparatorDocument7 pagesDifference Between Op-Amp and ComparatorCarloNo ratings yet
- Introduction To Operational Amplifiers: INSTRUCTED BY: Mr. A. KulasekaraDocument4 pagesIntroduction To Operational Amplifiers: INSTRUCTED BY: Mr. A. KulasekaraUdara ManawaduNo ratings yet
- Operational AmplifierDocument4 pagesOperational Amplifiershuvrobhattacharya01No ratings yet
- Institute Uie Department Academic Unit-1: Discover - . EmpowerDocument35 pagesInstitute Uie Department Academic Unit-1: Discover - . Empower21bcs9343 Saket PandeyNo ratings yet
- 3D Hall-Effect Position Sensor Offers Stray-Field CompensationDocument4 pages3D Hall-Effect Position Sensor Offers Stray-Field CompensationCarlos H. CarneiroNo ratings yet
- 3D Printing The Future of E-Mobility ToolsDocument3 pages3D Printing The Future of E-Mobility ToolsCarlos H. CarneiroNo ratings yet
- Focus On: Path To SystemsDocument32 pagesFocus On: Path To SystemsCarlos H. CarneiroNo ratings yet
- 4G Vs 5G - What's The DifferenceDocument5 pages4G Vs 5G - What's The DifferenceCarlos H. CarneiroNo ratings yet
- 7 Things You Need To Stop Doing To Be More Productive, Backed by ScienceDocument9 pages7 Things You Need To Stop Doing To Be More Productive, Backed by ScienceCarlos H. CarneiroNo ratings yet
- An Introduction To Automotive LIDAR (Rev. A)Document7 pagesAn Introduction To Automotive LIDAR (Rev. A)Carlos H. CarneiroNo ratings yet
- ED RenesasMayDocument25 pagesED RenesasMayCarlos H. CarneiroNo ratings yet
- 2 Channel Audio Equalizer Circuit - GadgetronicxDocument3 pages2 Channel Audio Equalizer Circuit - GadgetronicxCarlos H. CarneiroNo ratings yet
- 3MLiquidTapeAdhesives WP JR 10242018 PDFDocument3 pages3MLiquidTapeAdhesives WP JR 10242018 PDFCarlos H. CarneiroNo ratings yet
- 3 Considerations For Replacing MotorsDocument15 pages3 Considerations For Replacing MotorsCarlos H. CarneiroNo ratings yet
- 4 Big "Make Versus Buy" IoT DecisionsDocument5 pages4 Big "Make Versus Buy" IoT DecisionsCarlos H. CarneiroNo ratings yet
- Rotocol Anual: Protocol Manual, "D" Protocol March 2, 1999Document8 pagesRotocol Anual: Protocol Manual, "D" Protocol March 2, 1999Carlos H. CarneiroNo ratings yet
- Sourcing - Report SEE 2019Document23 pagesSourcing - Report SEE 2019Jovan KolovNo ratings yet
- Paseguruhan NG Mga Naglilingkod Sa Pamahalaan (Government Service Insurance System)Document2 pagesPaseguruhan NG Mga Naglilingkod Sa Pamahalaan (Government Service Insurance System)Keima KaratsugiNo ratings yet
- Cowon BT 401Document3 pagesCowon BT 401BradNo ratings yet
- Kul-24.3200 L01 Resistance 001 2015 AutumnDocument45 pagesKul-24.3200 L01 Resistance 001 2015 AutumnBraulyo PimentelNo ratings yet
- Tabela Ouro 03-11-10 AtualizeDocument32 pagesTabela Ouro 03-11-10 AtualizerobjulianoNo ratings yet
- NX Conditional Logic StatementsDocument1 pageNX Conditional Logic StatementsmarcoNo ratings yet
- VACANCY ANNOUNCEMENT - Mechanical TechnicianDocument2 pagesVACANCY ANNOUNCEMENT - Mechanical TechnicianBoma ChimaNo ratings yet
- Section 3Document10 pagesSection 3Try FajarmanNo ratings yet
- 00 Catalogue Update UK PDFDocument7 pages00 Catalogue Update UK PDFhepcomotionNo ratings yet
- Ecsecuritybased-Safety Auto Brake System For Hill Station Vehicle Using Mems Sensor.Document3 pagesEcsecuritybased-Safety Auto Brake System For Hill Station Vehicle Using Mems Sensor.kanchan bone100% (1)
- Arduino Learning Guide For Beginner Using Maker UNODocument69 pagesArduino Learning Guide For Beginner Using Maker UNOKhairul Yop AzreenNo ratings yet
- What Is Piping PDFDocument7 pagesWhat Is Piping PDFZaytj CondorNo ratings yet
- IKEA Kitchen Planner 5Document13 pagesIKEA Kitchen Planner 5Sumit MotwaniNo ratings yet
- Introduction To StructuralDocument46 pagesIntroduction To Structuraljaman hossainNo ratings yet
- EST3 v5 (1) .0 System Operation ManualDocument98 pagesEST3 v5 (1) .0 System Operation ManualjulchabNo ratings yet
- Cable 31Document6 pagesCable 31Owolabi PetersNo ratings yet
- Unit 1 Grammar Practice: Present Tense ReviewDocument1 pageUnit 1 Grammar Practice: Present Tense Reviewdoors213No ratings yet
- IT Database Administrator CV TemplateIEDocument2 pagesIT Database Administrator CV TemplateIEMonster UKNo ratings yet
- Install OptsimDocument25 pagesInstall OptsimPaola Juliana Paredes CeronNo ratings yet
- Pra Rancangan Pabrik Polypropylene Dari Propylene Dengan ProsesDocument1 pagePra Rancangan Pabrik Polypropylene Dari Propylene Dengan ProsesWira Nata S SinuhajiNo ratings yet
- Literature ReviewDocument8 pagesLiterature ReviewVincent AlbaNo ratings yet
- Teaching Philosophy StatementDocument2 pagesTeaching Philosophy Statementapi-309359459No ratings yet
- Air Quality: Virendra Sethi Vsethi@iitb - Ac.in 7809Document38 pagesAir Quality: Virendra Sethi Vsethi@iitb - Ac.in 7809Rahul KumarNo ratings yet