You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Assignment 3-Solutions PDFDocument6 pagesAssignment 3-Solutions PDFNickson KomsNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Week 2 Hydraulic JumpDocument26 pagesWeek 2 Hydraulic JumpNickson KomsNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- CE 322 Assignment 1 - SolutionDocument13 pagesCE 322 Assignment 1 - SolutionNickson KomsNo ratings yet
- FLOW IN CLOSED CONDUITS TutorialsDocument7 pagesFLOW IN CLOSED CONDUITS TutorialsNickson KomsNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Boundary Layer Vorticity and The Rise of "Hairpins"Document10 pagesBoundary Layer Vorticity and The Rise of "Hairpins"Nickson KomsNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Ce 322 Project 1Document2 pagesCe 322 Project 1Nickson KomsNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Water Hammer Tutorials: Solution To Sample Problem 1Document4 pagesWater Hammer Tutorials: Solution To Sample Problem 1Nickson KomsNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Water Hammer Tutorials Attempt The Tutorials and Check Your Answers Against The Solutions GivenDocument3 pagesWater Hammer Tutorials Attempt The Tutorials and Check Your Answers Against The Solutions GivenNickson KomsNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Flow in Pipes-Sample Problems and TutorialsDocument15 pagesFlow in Pipes-Sample Problems and TutorialsNickson KomsNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Worked Examples Using Nomographs and Colebrook ChartsDocument5 pagesWorked Examples Using Nomographs and Colebrook ChartsNickson Koms100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Culvert Tutorial Problem PDFDocument1 pageCulvert Tutorial Problem PDFNickson KomsNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Case Studies of Bridge FailuresDocument16 pagesCase Studies of Bridge FailuresNickson KomsNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- TOPIC: FLOW SEPARATION (Boundary Layer Separation) : Questions To Be AnsweredDocument12 pagesTOPIC: FLOW SEPARATION (Boundary Layer Separation) : Questions To Be AnsweredNickson KomsNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- HYDRAULICS II - Week 4-Lecture 2.Document20 pagesHYDRAULICS II - Week 4-Lecture 2.Nickson KomsNo ratings yet
- CE 332 Geotechnical Engineering I: Lecture 5: Compaction vs. ConsolidationDocument6 pagesCE 332 Geotechnical Engineering I: Lecture 5: Compaction vs. ConsolidationNickson KomsNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Consolidation: Elastic Settlement or Immediate SettlementDocument5 pagesConsolidation: Elastic Settlement or Immediate SettlementNickson KomsNo ratings yet
- CE 322 - Week 7 - Lecture 1Document2 pagesCE 322 - Week 7 - Lecture 1Nickson KomsNo ratings yet
- CE 322 Assignment 1Document18 pagesCE 322 Assignment 1Nickson KomsNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- CE 322 Assignment 1Document2 pagesCE 322 Assignment 1Nickson KomsNo ratings yet
- CE 332 Geotechnical Engineering IDocument30 pagesCE 332 Geotechnical Engineering INickson KomsNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- CE 352 Lecture 2a - Week 4 Network Diagrams-Critical Path Method (CPM) & Project Evaluation & Review Techniques (PERT)Document48 pagesCE 352 Lecture 2a - Week 4 Network Diagrams-Critical Path Method (CPM) & Project Evaluation & Review Techniques (PERT)Nickson KomsNo ratings yet
- CE 332 Lecture 4.Document30 pagesCE 332 Lecture 4.Nickson KomsNo ratings yet
- CE 352 Lecture 2 PDFDocument41 pagesCE 352 Lecture 2 PDFNickson KomsNo ratings yet
- CE 332 Geotechnical Engineering I: Lecture 1: Stress in The Ground (Total & Effective Stresses Within A Soil Mass)Document24 pagesCE 332 Geotechnical Engineering I: Lecture 1: Stress in The Ground (Total & Effective Stresses Within A Soil Mass)Nickson KomsNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Chemical Properties of WaterDocument9 pagesChemical Properties of WaterMohammad Cipto SugionoNo ratings yet
- Flow Maldistribution and Header DesignDocument28 pagesFlow Maldistribution and Header DesignFati Andari Almahdini67% (3)
- TDS Y3000p-2021.2Document6 pagesTDS Y3000p-2021.2jituniNo ratings yet
- Magnon Spintronics: Review ArticleDocument9 pagesMagnon Spintronics: Review Article許良兆No ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Ellingham DiagramsDocument4 pagesEllingham DiagramsozkangurkalNo ratings yet
- In The Name of God: Time Dependent Behavior of RocksDocument48 pagesIn The Name of God: Time Dependent Behavior of RocksDiego Palomino GasteluNo ratings yet
- Engineering Encyclopedia: Defect-Related Metal FailuresDocument19 pagesEngineering Encyclopedia: Defect-Related Metal FailuresAnonymous S9qBDVkyNo ratings yet
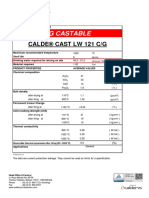
- Tds Calde Cast LW 121 CGDocument1 pageTds Calde Cast LW 121 CGAfronie Cepoz D'nextNo ratings yet
- GO-PANI Conductive MembraneDocument13 pagesGO-PANI Conductive MembraneMadalinaNo ratings yet
- Aspect Ratio Consideration in Flat Plate Concrete Slab DeflectionDocument16 pagesAspect Ratio Consideration in Flat Plate Concrete Slab DeflectionMihdi CaballeroNo ratings yet
- D3039 3039MDocument12 pagesD3039 3039MMariana CarvalhoNo ratings yet
- Lid I Fluid Dynamics: Physics 1 Physics 1Document15 pagesLid I Fluid Dynamics: Physics 1 Physics 1AbcNo ratings yet
- Czochralski Crystal Growth Technique and Zone RefiningDocument3 pagesCzochralski Crystal Growth Technique and Zone RefiningJohn JosephNo ratings yet
- Mott Schottky IntroDocument5 pagesMott Schottky Introacollord2603No ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- CHM 101 - Hybridization and Shapes of MoleculesDocument12 pagesCHM 101 - Hybridization and Shapes of Moleculeslokpored NojporesNo ratings yet
- Behaviour of Sand Confined With Single and Multiple GeocellsDocument14 pagesBehaviour of Sand Confined With Single and Multiple GeocellsManaswini VadlamaniNo ratings yet
- Graduation ProjectDocument18 pagesGraduation Projectmohamed moradNo ratings yet
- EvaporationDocument51 pagesEvaporationPratiksha GoreNo ratings yet
- Basic Automobile Design: Prepared By, Chirag BhangaleDocument66 pagesBasic Automobile Design: Prepared By, Chirag BhangaleMustapha LAARAJNo ratings yet
- Effective StressDocument24 pagesEffective StressAkshay BundhooNo ratings yet
- Diamond Like Amorphous Carbon PDFDocument153 pagesDiamond Like Amorphous Carbon PDFமாத்தி யோசிப்பேன்No ratings yet
- D882 - Pruebas A Películas.Document11 pagesD882 - Pruebas A Películas.CamiloSilvaNo ratings yet
- Evaporation Analysis in Sintered Wick MicrostructuresDocument13 pagesEvaporation Analysis in Sintered Wick MicrostructuresArley Salazar HincapieNo ratings yet
- Sedimentation PDFDocument16 pagesSedimentation PDFjamaiiicaNo ratings yet
- Statistical Mechanics Lecture Notes (2006), L14Document4 pagesStatistical Mechanics Lecture Notes (2006), L14OmegaUserNo ratings yet
- Low Press Carbg and High Press QNCHGDocument56 pagesLow Press Carbg and High Press QNCHGskluxNo ratings yet
- Tarea 2 GeodinamicaDocument11 pagesTarea 2 GeodinamicaCarlos David Valencia0% (1)
- Fluid Mechanics Q-ADocument2 pagesFluid Mechanics Q-AAnonymous TX2OckgiZNo ratings yet
- ER5301Document1 pageER5301Debprakash PradhanNo ratings yet
- X-Ray Diffraction BasicsDocument18 pagesX-Ray Diffraction BasicsAlexandre DVulcanNo ratings yet