You might also like
- Vieira GustavoDocument99 pagesVieira GustavoMarwan SamirNo ratings yet
- Industrial Revolution 4.0-The Role and Challenge For EngineersDocument21 pagesIndustrial Revolution 4.0-The Role and Challenge For EngineersSarrvish SubramaniamNo ratings yet
- PELCO Camera Integration Guide PDFDocument65 pagesPELCO Camera Integration Guide PDFRazvan FarcasNo ratings yet
- Belgium Made Different - Industry 4.0Document72 pagesBelgium Made Different - Industry 4.0lucreziaNo ratings yet
- PELCO Camera Integration GuideDocument65 pagesPELCO Camera Integration GuidevictorNo ratings yet
- Christophe Bobda-Introduction To Reconfigurable Computing - Architectures, Algorithms and Applications (2007)Document375 pagesChristophe Bobda-Introduction To Reconfigurable Computing - Architectures, Algorithms and Applications (2007)Vittalbc ChikkalakiNo ratings yet
- Introduction To Reconfigurable ComputingDocument30 pagesIntroduction To Reconfigurable Computing2023ht80036No ratings yet
- ICO Brochure 2.0 - BCGDocument20 pagesICO Brochure 2.0 - BCGСергей СтепынинNo ratings yet
- Industry 40 Merging Internet and Factories Fabernovel Study 160216092410Document29 pagesIndustry 40 Merging Internet and Factories Fabernovel Study 160216092410Tran AnhNo ratings yet
- VLSI Lab Man CMPLTDocument52 pagesVLSI Lab Man CMPLTŞøfţbóý HãřîNo ratings yet
- New quality control system for paper industryDocument4 pagesNew quality control system for paper industryAdjie De'RufinNo ratings yet
- Identification and Detection of Industrial Faults Using Raspberry Pico BotDocument4 pagesIdentification and Detection of Industrial Faults Using Raspberry Pico BotInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- BA00065SEN 0112 PV209xxDocument156 pagesBA00065SEN 0112 PV209xxamit kadamiyaNo ratings yet
- Industrialcybersecurity EbookDocument449 pagesIndustrialcybersecurity EbookVladik100% (1)
- Factory Io Rev3Document2 pagesFactory Io Rev3Ahmad SamiNo ratings yet
- RFID and Blockchain Drive Lean Manufacturing EfficiencyDocument15 pagesRFID and Blockchain Drive Lean Manufacturing EfficiencyrlarapscribdNo ratings yet
- Comos Book 15 X 21 CM PDFDocument12 pagesComos Book 15 X 21 CM PDFAkshayaNo ratings yet
- BCG Why Cement Producers Need To Embrace Industry 4.0 Dec 2018 - tcm9 208964Document7 pagesBCG Why Cement Producers Need To Embrace Industry 4.0 Dec 2018 - tcm9 208964ISA SOINDNo ratings yet
- Planet Fieldbus: Profibus and Profinet: TrendsDocument32 pagesPlanet Fieldbus: Profibus and Profinet: TrendsArturo Velazquez MoralesNo ratings yet
- PolyWorksPlug-in (Ai) NDI ScanTRAKDocument11 pagesPolyWorksPlug-in (Ai) NDI ScanTRAKtiborNo ratings yet
- MAR BR FormWeigh 30004511 ENDocument1 pageMAR BR FormWeigh 30004511 ENYanto YanNo ratings yet
- Studie Engineering 4.0 ENDocument38 pagesStudie Engineering 4.0 ENRachael KristiensenNo ratings yet
- Mixed Reality For On-Site Self-Instruction and SelDocument6 pagesMixed Reality For On-Site Self-Instruction and Selnghitran.31221020434No ratings yet
- Siplace D4I Highest Performance: Specification From SR.605.03 SP2, 10/2012 EditionDocument48 pagesSiplace D4I Highest Performance: Specification From SR.605.03 SP2, 10/2012 EditionOrbán NorbertNo ratings yet
- Festo at WorldSkills Abu Dhabi 2017Document2 pagesFesto at WorldSkills Abu Dhabi 2017Aland BravoNo ratings yet
- Paper MakeDocument19 pagesPaper MakeVishnu KollarethNo ratings yet
- Zero-defect green manufacturer uses selective solderingDocument6 pagesZero-defect green manufacturer uses selective solderingMehzabeen ShahidyNo ratings yet
- Survey Paper On The Quality Controland Inspection of Antigen Test KitDocument5 pagesSurvey Paper On The Quality Controland Inspection of Antigen Test KitInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Tdoct5999a UsaDocument100 pagesTdoct5999a UsambidNo ratings yet
- DSI - MPS® Transfer System Compact Trainer I4.0 - EN - DID1089 (Screen)Document2 pagesDSI - MPS® Transfer System Compact Trainer I4.0 - EN - DID1089 (Screen)mhafizanNo ratings yet
- Digital Twin VisionDocument13 pagesDigital Twin VisionYadav_Bae100% (1)
- Visi-Genie Magic Password Implementation: Document Date: Document RevisionDocument13 pagesVisi-Genie Magic Password Implementation: Document Date: Document RevisionSébastien MahutNo ratings yet
- NAPCON Digital Solutions Lead Process Industries to a Safe and Sustainable FutureDocument36 pagesNAPCON Digital Solutions Lead Process Industries to a Safe and Sustainable FutureprateekisbestNo ratings yet
- Multitasking With Raspberry Pi by Dogan IbrahimDocument232 pagesMultitasking With Raspberry Pi by Dogan IbrahimrvpilotNo ratings yet
- Ba00065sen 0516Document190 pagesBa00065sen 0516hassanaagibNo ratings yet
- Gudlavalleru Engineering CollegeDocument12 pagesGudlavalleru Engineering CollegeManish KumarNo ratings yet
- Robot Control With Rasberry PiDocument36 pagesRobot Control With Rasberry PiJason DavisNo ratings yet
- Production events graphical deduction model enables real-time production controlDocument19 pagesProduction events graphical deduction model enables real-time production controlDelta Anakx PagaralamzNo ratings yet
- Learning in The AutFab - The Fully Automated Industrie 4.0 Learning Factory of The University of Applied Sciences Darmstadt (2018)Document8 pagesLearning in The AutFab - The Fully Automated Industrie 4.0 Learning Factory of The University of Applied Sciences Darmstadt (2018)lazarNo ratings yet
- 4800 Appliance DatasheetDocument5 pages4800 Appliance DatasheetlokeshNo ratings yet
- Customization of Mass-Produced Parts byDocument4 pagesCustomization of Mass-Produced Parts bykarolina.wrzesniowskaNo ratings yet
- I-Series ENDocument28 pagesI-Series ENsaurabhNo ratings yet
- NI 9234 5 V, IEPE and AC/DC Analog Input, 51.2 KS/S/CH, 4 CH ModuleDocument9 pagesNI 9234 5 V, IEPE and AC/DC Analog Input, 51.2 KS/S/CH, 4 CH ModuleJefersonNo ratings yet
- The New World of Hybrid and Virtual Production, SVCE04.Digital - November - 2022Document19 pagesThe New World of Hybrid and Virtual Production, SVCE04.Digital - November - 2022john BronsonNo ratings yet
- Pelco Camera Integration GuideDocument68 pagesPelco Camera Integration GuideMohanChandraNo ratings yet
- Introduction To Industry 4.0 For Mechatronics Technicians: MPS 203 I4.0Document2 pagesIntroduction To Industry 4.0 For Mechatronics Technicians: MPS 203 I4.0abrap_d100% (1)
- SunSun RFID d1bDocument6 pagesSunSun RFID d1bJhalak SauravNo ratings yet
- A Smart Sensor Signal Conditioner: Mark I. Schiefer and Michael J. Lally Paul C. EdieDocument7 pagesA Smart Sensor Signal Conditioner: Mark I. Schiefer and Michael J. Lally Paul C. EdieSandy VichuNo ratings yet
- Interactive manufacturing data platformDocument11 pagesInteractive manufacturing data platformCesar RamirezNo ratings yet
- Quick Select Product Guide Process Interfaces Tdoct5999 - EngDocument100 pagesQuick Select Product Guide Process Interfaces Tdoct5999 - EngventjeNo ratings yet
- Python Manual 22-23Document28 pagesPython Manual 22-23iamapostleofchristNo ratings yet
- Sciencedirect: Jasprabhjit Mehami, Mauludin Nawi, Ray Y Zhong Jasprabhjit Mehami, Mauludin Nawi, Ray Y ZhongDocument10 pagesSciencedirect: Jasprabhjit Mehami, Mauludin Nawi, Ray Y Zhong Jasprabhjit Mehami, Mauludin Nawi, Ray Y ZhongSoli UdinNo ratings yet
- 01 HCIP-Datacom-Python Programming Basics Lab GuideDocument41 pages01 HCIP-Datacom-Python Programming Basics Lab GuidePaterson NguepiNo ratings yet
- Introduction To Reconfigurable Computing Architectures Algorithms and ApplicationsDocument374 pagesIntroduction To Reconfigurable Computing Architectures Algorithms and ApplicationsstcaseNo ratings yet
- © Copr. 1949-1998 Hewlett-Packard CoDocument28 pages© Copr. 1949-1998 Hewlett-Packard CoDMANo ratings yet
- Advanced Two-Level APPS Model for RFID-Enabled Ubiquitous ManufacturingDocument14 pagesAdvanced Two-Level APPS Model for RFID-Enabled Ubiquitous ManufacturingDavid GameiroNo ratings yet
- Industry 4.0: Don T Just Claim It - Make It !Document6 pagesIndustry 4.0: Don T Just Claim It - Make It !ruben12221No ratings yet
- Learning Factory 4.0 DashboardDocument62 pagesLearning Factory 4.0 Dashboard233701No ratings yet
- IELTS Assessment Criteria - SPEAKING - Band DescriptorsDocument1 pageIELTS Assessment Criteria - SPEAKING - Band DescriptorsIbrahim Babatunde OladapoNo ratings yet
- 2017 01 VEGA3 PreviewDocument2 pages2017 01 VEGA3 Preview233701No ratings yet
- Learning Factory 4.0 DashboardDocument62 pagesLearning Factory 4.0 Dashboard233701No ratings yet
- Court Pick Parries Questions On Abortion and Health Law: What's NewsDocument48 pagesCourt Pick Parries Questions On Abortion and Health Law: What's News233701No ratings yet
- CH 14 Techniques of Failure AnalysisDocument6 pagesCH 14 Techniques of Failure AnalysisNam PhakeNo ratings yet
- 1 s2.0 S2212827116309222 MainDocument6 pages1 s2.0 S2212827116309222 Main233701No ratings yet
- Engineering Failure Analysis: Fei-Jun Chen, Cheng Yao, Zhen-Guo YangDocument13 pagesEngineering Failure Analysis: Fei-Jun Chen, Cheng Yao, Zhen-Guo Yang233701No ratings yet
- Nbs Special Publication 423Document256 pagesNbs Special Publication 4232337010% (1)
- Physical Metallurgy Principles of Ferrous AlloysDocument59 pagesPhysical Metallurgy Principles of Ferrous AlloysserdelixNo ratings yet
- Essays Words Guide PDFDocument16 pagesEssays Words Guide PDFChhomNo ratings yet
- Root Cause Analysis (RCA) of Fractured ASTM A53 Carbon Steel Pipe at Oil & Gas CompanyDocument8 pagesRoot Cause Analysis (RCA) of Fractured ASTM A53 Carbon Steel Pipe at Oil & Gas CompanynaderbahramiNo ratings yet
- Photo ReadingDocument12 pagesPhoto ReadingHannibal Hannibal100% (1)
- Optimization of Complex Surface Machining on 5-Axis CNC Machines Using a Cutting Tool Path Planning TechniqueDocument6 pagesOptimization of Complex Surface Machining on 5-Axis CNC Machines Using a Cutting Tool Path Planning Technique233701No ratings yet
- Reporte de notas de Mecánica de FluidosDocument1 pageReporte de notas de Mecánica de Fluidos233701No ratings yet
- Micro-Mechanics 2013 Introduction PDFDocument59 pagesMicro-Mechanics 2013 Introduction PDF233701No ratings yet
- Official publisher & provider of Scilab open source softwareDocument33 pagesOfficial publisher & provider of Scilab open source software233701No ratings yet
- Análisis Tensorial SokolnikoffDocument345 pagesAnálisis Tensorial SokolnikoffVillavicencio G Abdiel ANo ratings yet
- Introduction To SciLabDocument51 pagesIntroduction To SciLabPradeep Sontakke100% (1)
- Beverage and Condiment Quarterly Sales PivotTable ReportDocument10 pagesBeverage and Condiment Quarterly Sales PivotTable Report233701No ratings yet
- Scilab Tutorials For Computational Science - Chandler and RobertsDocument82 pagesScilab Tutorials For Computational Science - Chandler and Robertspirata333No ratings yet
- Bioresource Technology: Jianguo Jiang, Xuejuan Du, Siio NG, Chang ZhangDocument7 pagesBioresource Technology: Jianguo Jiang, Xuejuan Du, Siio NG, Chang Zhang233701No ratings yet
- Ex MatlabDocument7 pagesEx MatlabAbdulrhman AL-MasreNo ratings yet
- Fuelproccesingtech SampleDocument7 pagesFuelproccesingtech Sample233701No ratings yet
- CBR A Drug DevelopDocument2 pagesCBR A Drug DevelopAlfieNo ratings yet
- MXTX1012 GX PA00Document28 pagesMXTX1012 GX PA00200880956No ratings yet
- Business Environment of Micro Producers in General Santos CityDocument148 pagesBusiness Environment of Micro Producers in General Santos CityAlbedo KreideprinzNo ratings yet
- Top Triangle Bikini Kinda PatternDocument5 pagesTop Triangle Bikini Kinda PatternVALLEDOR, Dianne Ces Marie G.No ratings yet
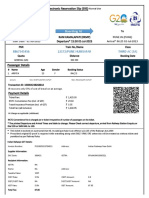
- 22172/pune Humsafar Third Ac (3A)Document2 pages22172/pune Humsafar Third Ac (3A)VISHAL SARSWATNo ratings yet
- "GrabCut" - Interactive Foreground Extraction Using Iterated Graph CutsDocument6 pages"GrabCut" - Interactive Foreground Extraction Using Iterated Graph CutsdiegomfagundesNo ratings yet
- Mid Test (OPEN BOOK) : Swiss German UniversityDocument5 pagesMid Test (OPEN BOOK) : Swiss German Universityaan nug rohoNo ratings yet
- BSI ISOIEC27001 Assessment Checklist UK enDocument3 pagesBSI ISOIEC27001 Assessment Checklist UK enDanushkaPereraNo ratings yet
- BIR Rule on Taxing Clubs OverturnedDocument2 pagesBIR Rule on Taxing Clubs OverturnedLucky JavellanaNo ratings yet
- MCS 150 Page 1Document2 pagesMCS 150 Page 1Galina NovahovaNo ratings yet
- Francisco vs. Master Iron Works & Construction Corp.Document12 pagesFrancisco vs. Master Iron Works & Construction Corp.Elsha DamoloNo ratings yet
- Sdoc 09 13 SiDocument70 pagesSdoc 09 13 SiJhojo Tesiorna FalcutilaNo ratings yet
- STIPULATION To Stay ProceedingsDocument7 pagesSTIPULATION To Stay Proceedingsjamesosborne77-1No ratings yet
- SD WanDocument32 pagesSD WanAbdalrawoof AlsherifNo ratings yet
- Cherry Mx1A-Lxxa/B: Housing Colour: KeymoduleDocument5 pagesCherry Mx1A-Lxxa/B: Housing Colour: KeymoduleArtur MartinsNo ratings yet
- Validation and Calibration of Master PlanDocument12 pagesValidation and Calibration of Master PlanHk Hk100% (4)
- Principles of BioenergyDocument25 pagesPrinciples of BioenergyNazAsyrafNo ratings yet
- Saura Import & Export Co., Inc. v. DBPDocument2 pagesSaura Import & Export Co., Inc. v. DBPsophiaNo ratings yet
- IM EAMC ENDORSEMENT (Updated Feb 2020)Document7 pagesIM EAMC ENDORSEMENT (Updated Feb 2020)Joshua Elijah ArsenioNo ratings yet
- Compile C/C++ in Atom editorDocument2 pagesCompile C/C++ in Atom editorNishant KeswaniNo ratings yet
- Course: Basic Technical English Teacher: Lic. Victor Matienzo BustamanteDocument11 pagesCourse: Basic Technical English Teacher: Lic. Victor Matienzo BustamanteSelene FloresNo ratings yet
- Apply Basic Accessibility StandardsDocument9 pagesApply Basic Accessibility StandardsjohnNo ratings yet
- Skyline Software Systems, Inc. v. Keyhole, Inc Et Al - Document No. 34Document10 pagesSkyline Software Systems, Inc. v. Keyhole, Inc Et Al - Document No. 34Justia.comNo ratings yet
- Therm Coal Out LookDocument27 pagesTherm Coal Out LookMai Kim Ngan100% (1)
- Software Requirements Specification For MPAYMENT ParisDocument4 pagesSoftware Requirements Specification For MPAYMENT ParisbeckokoNo ratings yet
- Manuale NanoVIP3 Rel. 1.5 en (UK)Document76 pagesManuale NanoVIP3 Rel. 1.5 en (UK)ECNo ratings yet
- Appropriation For Annual Budget Year 2022Document5 pagesAppropriation For Annual Budget Year 2022Rafael FerolinoNo ratings yet
- Item 1 - Ficha Tecnica IBOP Upper Canrig 1250 ACDocument6 pagesItem 1 - Ficha Tecnica IBOP Upper Canrig 1250 ACanghelo marquezNo ratings yet
- ICAP Pakistan Final Exams Business Finance Decisions RecommendationsDocument4 pagesICAP Pakistan Final Exams Business Finance Decisions RecommendationsImran AhmadNo ratings yet