You might also like
- Beginning FPGA Programming - Partie73Document5 pagesBeginning FPGA Programming - Partie73ali alilouNo ratings yet
- Using Serial Peripheral InterfaceDocument21 pagesUsing Serial Peripheral InterfaceArton TonoNo ratings yet
- Using The Serial Peripheral Interface (SPI) Module On 68HC (9) 08 MicrocontrollersDocument8 pagesUsing The Serial Peripheral Interface (SPI) Module On 68HC (9) 08 MicrocontrollersJackson Dias RochaNo ratings yet
- Beginning FPGA Programming - Partie70Document5 pagesBeginning FPGA Programming - Partie70ali alilouNo ratings yet
- Beginning FPGA Programming - Partie76Document5 pagesBeginning FPGA Programming - Partie76ali alilouNo ratings yet
- Spi Final Project 21bee1161Document11 pagesSpi Final Project 21bee1161Abhishek pathakNo ratings yet
- Beginning FPGA Programming - Partie72Document5 pagesBeginning FPGA Programming - Partie72ali alilouNo ratings yet
- SPI Using The Rabbit Clocked Serial Ports: SPI I/O SignalsDocument9 pagesSPI Using The Rabbit Clocked Serial Ports: SPI I/O SignalsYaseen Ghulam100% (3)
- ScriptkoDocument3 pagesScriptkolaarnie graceNo ratings yet
- LPC2148 SpiDocument26 pagesLPC2148 SpiNarendra SvNo ratings yet
- Spi SeminarDocument17 pagesSpi Seminarjatanbhatt89No ratings yet
- Digilent ChipKIT SPI LibraryDocument8 pagesDigilent ChipKIT SPI LibrarySalvador MoralesNo ratings yet
- Tutorial - How To Use SPI in TI F28335 TargetDocument19 pagesTutorial - How To Use SPI in TI F28335 TargetReginey BarbosaNo ratings yet
- Implementation of Serial Peripheral Interface (Spi) For Lpc2148 MicrocontrollerDocument4 pagesImplementation of Serial Peripheral Interface (Spi) For Lpc2148 MicrocontrollerSanchit AgrawalNo ratings yet
- ForgeFPGA Configuration Guide v2.1Document20 pagesForgeFPGA Configuration Guide v2.1HnnNo ratings yet
- SPI I2C Interface AnDocument13 pagesSPI I2C Interface AnNivin PaulNo ratings yet
- Microcontroller: By: Osama HasanDocument34 pagesMicrocontroller: By: Osama HasanGopinathManoharanNo ratings yet
- Unit 5 - Microprocessor & Its Application - WWW - Rgpvnotes.inDocument13 pagesUnit 5 - Microprocessor & Its Application - WWW - Rgpvnotes.inJayesh JoshiNo ratings yet
- Beginning FPGA Programming - Partie74Document5 pagesBeginning FPGA Programming - Partie74ali alilouNo ratings yet
- C-Code Software Routines For Using The SPI Interface On The MAX7456 On-Screen DisplayDocument9 pagesC-Code Software Routines For Using The SPI Interface On The MAX7456 On-Screen DisplayVinay Ashwath100% (2)
- 2 - Design Task 2012Document5 pages2 - Design Task 2012ᙢᗅᗁᕢᖱᖺᕦᐺᕱᘘ ᐻᓾᖱᖻᕠᔚᖺᗗᘘᖽᐸᗋᖇNo ratings yet
- Unit 5 - Microprocessor & Its Application - WWW - Rgpvnotes.inDocument12 pagesUnit 5 - Microprocessor & Its Application - WWW - Rgpvnotes.inPrayag ParasharNo ratings yet
- 10 NuTiny-NUC029 SPIDocument22 pages10 NuTiny-NUC029 SPIDharmendra SavaliyaNo ratings yet
- Basic OsDocument120 pagesBasic OsRodrigo Espinoza CorsNo ratings yet
- Mbed BK Ed2 CH 7Document42 pagesMbed BK Ed2 CH 7Pedro Augusto PeresNo ratings yet
- 8n-Esp8266 Spi Reference en v1.0Document15 pages8n-Esp8266 Spi Reference en v1.0zaleksNo ratings yet
- Simple As Possible ComputerDocument13 pagesSimple As Possible ComputerMd Raton AliNo ratings yet
- Principle of I2C Bus and Its Application in IC Design: Li Yifan, Mo FeiDocument9 pagesPrinciple of I2C Bus and Its Application in IC Design: Li Yifan, Mo FeiPronadeep BoraNo ratings yet
- (GOOD) SPI CommunicationsDocument17 pages(GOOD) SPI CommunicationsDuy Quang Nguyễn100% (1)
- Saha 2014Document6 pagesSaha 2014PoojaNo ratings yet
- SPI in RaspberryPiDocument8 pagesSPI in RaspberryPiMohammed PublicationsNo ratings yet
- Serial Peripheral Interface (SPI) TutorialDocument6 pagesSerial Peripheral Interface (SPI) TutorialOmar Khayyam100% (1)
- EE6008 Notes RejinpaulDocument234 pagesEE6008 Notes RejinpaulB.S. Mothika sriNo ratings yet
- Spi in Avr Atmega16/Atmega32: Sdi (Serial Data Input) Sdo (Serial Data Output) SCLK (Serial Clock) Cs (Chip Select)Document14 pagesSpi in Avr Atmega16/Atmega32: Sdi (Serial Data Input) Sdo (Serial Data Output) SCLK (Serial Clock) Cs (Chip Select)Murugadas HarnanNo ratings yet
- Serial Peripheral Interface in DSP: by Nayana Soni & Neha RajputDocument19 pagesSerial Peripheral Interface in DSP: by Nayana Soni & Neha RajputNeha RajputNo ratings yet
- SPI Slave VHDL Design - Surf-VHDLDocument12 pagesSPI Slave VHDL Design - Surf-VHDLअमरेश झाNo ratings yet
- PIC 16F877A Microcontroller Core Features: Unit 6Document10 pagesPIC 16F877A Microcontroller Core Features: Unit 6Altaaf MulaniNo ratings yet
- Embed Lab9Document10 pagesEmbed Lab9amitpanvekarNo ratings yet
- How To Drive 595 Shift Registers With AVR Hardware SPI JumDocument7 pagesHow To Drive 595 Shift Registers With AVR Hardware SPI Jumalberto55No ratings yet
- I C Slave To SPI Master Bridge: December 2010 Reference Design RD1094Document7 pagesI C Slave To SPI Master Bridge: December 2010 Reference Design RD1094Milton GenesNo ratings yet
- 9 I2c-SpiDocument40 pages9 I2c-SpiTam PhamNo ratings yet
- MIC 15 - Arduino AssemblyDocument11 pagesMIC 15 - Arduino Assemblysaleh buenqNo ratings yet
- Spi MSTDocument2 pagesSpi MSTFitohdezNo ratings yet
- Introduction To PIC: Microchip PIC 16F84 MicrocontrollerDocument53 pagesIntroduction To PIC: Microchip PIC 16F84 MicrocontrollerPradeep RajasekeranNo ratings yet
- Serial Peripheral Interface (SPI) BusDocument17 pagesSerial Peripheral Interface (SPI) BusSnorlax100% (1)
- Arduino - Serial Peripheral InterfaceDocument3 pagesArduino - Serial Peripheral Interfacewillingcoder.billionaireNo ratings yet
- Lcd2s SPI ExamplesDocument2 pagesLcd2s SPI ExamplesJarfoNo ratings yet
- Lecture 2Document23 pagesLecture 2Sherif HelmyNo ratings yet
- MICROPORCESSOR 8085 Lab ManualDocument53 pagesMICROPORCESSOR 8085 Lab ManualAjay PatilNo ratings yet
- 6 SpiDocument36 pages6 SpiMalik Adil Farooq50% (2)
- Pic Micro ControllersDocument3 pagesPic Micro ControllersSaurabh RastogiNo ratings yet
- Dspic33 SpiDocument30 pagesDspic33 Spidanielrb18No ratings yet
- HCS08 Spi WBTDocument18 pagesHCS08 Spi WBTAMIT VERMANo ratings yet
- Openldi Interface Blocks For Qsys: Chris Esser Staff Product Fae November 16, 2015Document10 pagesOpenldi Interface Blocks For Qsys: Chris Esser Staff Product Fae November 16, 2015Santoshkumar MalabagiNo ratings yet
- Arduino - SPIDocument4 pagesArduino - SPIMuhammad Fikri100% (1)
- MB85RS64V DS501 00015 4v0 EDocument36 pagesMB85RS64V DS501 00015 4v0 EimadNo ratings yet
- Chapter 05 - Msp430 IsaDocument71 pagesChapter 05 - Msp430 Isaokocha712No ratings yet
- Serial Peripheral Interface Bus - Wikipedia, The Free EncyclopediaDocument11 pagesSerial Peripheral Interface Bus - Wikipedia, The Free EncyclopediaManit100% (1)
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Caterpillar Performance Handbook 49 62020 - Partie80Document4 pagesCaterpillar Performance Handbook 49 62020 - Partie80ali alilouNo ratings yet
- Hw300 Highwall Mining System SpecificationsDocument4 pagesHw300 Highwall Mining System Specificationsali alilouNo ratings yet
- Caterpillar Performance Handbook 49 62020 Partie85Document4 pagesCaterpillar Performance Handbook 49 62020 Partie85ali alilouNo ratings yet
- Caterpillar Performance Handbook 49 62020 Partie86Document4 pagesCaterpillar Performance Handbook 49 62020 Partie86ali alilouNo ratings yet
- Front Shovels: Digging Envelopes 385C FSDocument4 pagesFront Shovels: Digging Envelopes 385C FSali alilouNo ratings yet
- Highwall Mining System: Hw300 Optional EquipmentDocument4 pagesHighwall Mining System: Hw300 Optional Equipmentali alilouNo ratings yet
- Caterpillar Performance Handbook 49 62020 Partie84Document4 pagesCaterpillar Performance Handbook 49 62020 Partie84ali alilouNo ratings yet
- 586C Site Prep Tractor: DimensionsDocument4 pages586C Site Prep Tractor: Dimensionsali alilouNo ratings yet
- Forest Products Work Tools: Logging Forks SpecificationsDocument4 pagesForest Products Work Tools: Logging Forks Specificationsali alilouNo ratings yet
- Notes - : PHB-Sec05-18.indd 126Document4 pagesNotes - : PHB-Sec05-18.indd 126ali alilouNo ratings yet
- Caterpillar Performance Handbook 49 62020 Partie77Document4 pagesCaterpillar Performance Handbook 49 62020 Partie77ali alilouNo ratings yet
- Millyards Wheel Loaders: Load Capacity Curves 966MDocument4 pagesMillyards Wheel Loaders: Load Capacity Curves 966Mali alilouNo ratings yet
- Millyards Wheel Loaders: Load Capacity Curves 980HDocument4 pagesMillyards Wheel Loaders: Load Capacity Curves 980Hali alilouNo ratings yet
- Millyards Wheel Loaders: Load Capacity Curves 950MDocument4 pagesMillyards Wheel Loaders: Load Capacity Curves 950Mali alilouNo ratings yet
- Processing/Loading Forest Machines: Shipping Dimensions 538/538 LLDocument4 pagesProcessing/Loading Forest Machines: Shipping Dimensions 538/538 LLali alilouNo ratings yet
- Mining and Earthmoving: Estimating Production Off-the-Job Example Problem (English) Example Problem (Metric)Document4 pagesMining and Earthmoving: Estimating Production Off-the-Job Example Problem (English) Example Problem (Metric)ali alilouNo ratings yet
- Processing/Loading Forest Machines: Shipping Dimensions 558 LLDocument4 pagesProcessing/Loading Forest Machines: Shipping Dimensions 558 LLali alilouNo ratings yet
- Caterpillar Performance Handbook 49 62020 Partie1Document4 pagesCaterpillar Performance Handbook 49 62020 Partie1ali alilouNo ratings yet
- Processing/Loading Forest Machines: Shipping Dimensions 320D Series 2 FMDocument4 pagesProcessing/Loading Forest Machines: Shipping Dimensions 320D Series 2 FMali alilouNo ratings yet
- Processing/Loading Forest Machines: Working Ranges 324D FMDocument4 pagesProcessing/Loading Forest Machines: Working Ranges 324D FMali alilouNo ratings yet
- Processing/Loading Forest Machines: Working Ranges 320D Series 2 FMDocument4 pagesProcessing/Loading Forest Machines: Working Ranges 320D Series 2 FMali alilouNo ratings yet
- Land Clearing: Equipment Selection TableDocument4 pagesLand Clearing: Equipment Selection Tableali alilouNo ratings yet
- Caterpillar Performance Handbook 49 62020 - Partie586Document4 pagesCaterpillar Performance Handbook 49 62020 - Partie586ali alilouNo ratings yet
- Caterpillar Performance Handbook 49 62020 - Partie573Document4 pagesCaterpillar Performance Handbook 49 62020 - Partie573ali alilouNo ratings yet
- Mining and Earthmoving: Estimating Production Off-the-Job Grade Resistance Total Resistance TractionDocument4 pagesMining and Earthmoving: Estimating Production Off-the-Job Grade Resistance Total Resistance Tractionali alilouNo ratings yet
- Notes - : PHB-Sec26-19.indd 126Document4 pagesNotes - : PHB-Sec26-19.indd 126ali alilouNo ratings yet
- Tables: Engine/Machine Cross ReferenceDocument4 pagesTables: Engine/Machine Cross Referenceali alilouNo ratings yet
- Caterpillar Performance Handbook 49 62020 - Partie587Document4 pagesCaterpillar Performance Handbook 49 62020 - Partie587ali alilouNo ratings yet
- Caterpillar Performance Handbook 49 62020 - Partie588Document4 pagesCaterpillar Performance Handbook 49 62020 - Partie588ali alilouNo ratings yet
- Caterpillar Performance Handbook 49 62020 - Partie589Document4 pagesCaterpillar Performance Handbook 49 62020 - Partie589ali alilouNo ratings yet
- Performance of Mimo-Ofdm System For Rayleigh Fading Channel: Pallavi Bhatnagar, Jaikaran Singh, Mukesh TiwariDocument4 pagesPerformance of Mimo-Ofdm System For Rayleigh Fading Channel: Pallavi Bhatnagar, Jaikaran Singh, Mukesh TiwariNung NingNo ratings yet
- Tremaine Johnson CompTIA HW#1Document4 pagesTremaine Johnson CompTIA HW#1tntgaming222No ratings yet
- Braking of DC MotorsDocument2 pagesBraking of DC MotorsSenuka Herath100% (1)
- Industrial Training: Presented By: Padmaja PandeDocument13 pagesIndustrial Training: Presented By: Padmaja PandePadmaja PandeNo ratings yet
- JB Hi Fi and The Good Guys BYO Mobile PlansDocument2 pagesJB Hi Fi and The Good Guys BYO Mobile PlansMitchNo ratings yet
- P6NK90ZDocument13 pagesP6NK90ZVictor ChangNo ratings yet
- 100% Stator Earth Fault Protection of Generator - Electrical4uDocument2 pages100% Stator Earth Fault Protection of Generator - Electrical4uTLD 4 PSNo ratings yet
- Regulador 5 - 3,3V LD1117 Home Sony PDFDocument44 pagesRegulador 5 - 3,3V LD1117 Home Sony PDFErnandesTorresBarbosaNo ratings yet
- Wireless Communications LabDocument14 pagesWireless Communications LabSnowflakeNo ratings yet
- TDA7073A DatasheetDocument17 pagesTDA7073A Datasheetsergio_741No ratings yet
- Ursalink UR51 Industrial Cellular Router User GuideDocument129 pagesUrsalink UR51 Industrial Cellular Router User GuideUrsalink MarketingNo ratings yet
- Networking BasicsDocument137 pagesNetworking BasicsJerald Sam ThanarajNo ratings yet
- Radio Network Feature Presentation Idle Mode BehaviorDocument23 pagesRadio Network Feature Presentation Idle Mode BehaviorkemokonoNo ratings yet
- Mixed-Signal-Electronics: PD Dr.-Ing. Stephan HenzlerDocument26 pagesMixed-Signal-Electronics: PD Dr.-Ing. Stephan HenzlerAhmed HamoudaNo ratings yet
- Altera Cyclone III 3C120 Dev KitDocument90 pagesAltera Cyclone III 3C120 Dev KitNguyen Minh ToanNo ratings yet
- UsersGuide SC1 v1.1 en 180105Document51 pagesUsersGuide SC1 v1.1 en 180105Supuran RichardoNo ratings yet
- SAILOR 6120 Installation ManualDocument116 pagesSAILOR 6120 Installation ManualFernando Rebolo100% (1)
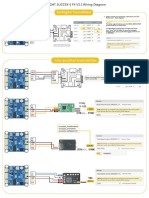
- SUCCEX-E F4 V2.1 Wiring Diagram 201006Document3 pagesSUCCEX-E F4 V2.1 Wiring Diagram 201006jhon alexander barbosa avendaño100% (3)
- RN Executive Summary: Description Source Ne Level Parameter Active InactiveDocument2,579 pagesRN Executive Summary: Description Source Ne Level Parameter Active InactiveSeptian MursidiNo ratings yet
- Pe Lab ExperimentsDocument6 pagesPe Lab Experimentsramesh tNo ratings yet
- HCC/HCF4042B: Quad Clocked "D" LatchDocument13 pagesHCC/HCF4042B: Quad Clocked "D" LatchjuenkkinNo ratings yet
- Determining Relay Coil - InductanceDocument1 pageDetermining Relay Coil - InductanceEBENo ratings yet
- An307 - Perimeter Wire Fence ManualDocument16 pagesAn307 - Perimeter Wire Fence ManualgeorgedragosNo ratings yet
- ESP8266 - ElectroDragonDocument4 pagesESP8266 - ElectroDragonRicardo MejiaNo ratings yet
- Exam in Digital Communications, EITG05: October 26, 2017Document7 pagesExam in Digital Communications, EITG05: October 26, 2017Abdelhakim KhlifiNo ratings yet
- HID iCLASS SecurityDocument13 pagesHID iCLASS SecurityMrJohnGalt09No ratings yet
- Untitled HHH HHHDocument12 pagesUntitled HHH HHHWamema joshuaNo ratings yet
- Operating and Programming Instructions For The Control Units For Vibratory Drives Type ESR 2000Document16 pagesOperating and Programming Instructions For The Control Units For Vibratory Drives Type ESR 2000Daniel Castro FloresNo ratings yet
- Marketing Environment of AirtelDocument7 pagesMarketing Environment of AirtelTakauv-thiyagi Thiyagu0% (1)
- A History of Z MeasurementDocument63 pagesA History of Z MeasurementactecNo ratings yet