0% found this document useful (0 votes)
1K views2 pagesRobotics and Automation Exam Questions
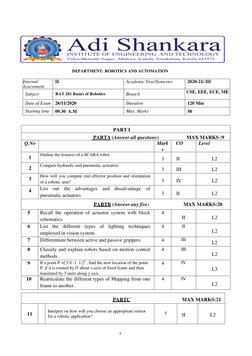
The document is an internal assessment for a robotics and automation course covering basics of robotics. It is divided into 3 parts worth a total of 50 marks. Part 1 contains 4 multiple choice questions worth 3 marks each about SCARA robots, actuators, computing end effector position and pneumatic actuators. Part 2 contains 5 questions worth 4 marks each about actuator systems, vision systems, grippers, motion control methods and coordinate transformations. Part 3 contains 2 questions worth 7 marks each about choosing sensors, hydraulic actuators, end effectors, robot configurations or coordinate transformations. The document also lists the relevant course outcomes and bloom's taxonomy levels for the questions.
Uploaded by
Yadhu KrishnanCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
1K views2 pagesRobotics and Automation Exam Questions
The document is an internal assessment for a robotics and automation course covering basics of robotics. It is divided into 3 parts worth a total of 50 marks. Part 1 contains 4 multiple choice questions worth 3 marks each about SCARA robots, actuators, computing end effector position and pneumatic actuators. Part 2 contains 5 questions worth 4 marks each about actuator systems, vision systems, grippers, motion control methods and coordinate transformations. Part 3 contains 2 questions worth 7 marks each about choosing sensors, hydraulic actuators, end effectors, robot configurations or coordinate transformations. The document also lists the relevant course outcomes and bloom's taxonomy levels for the questions.
Uploaded by
Yadhu KrishnanCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
- Exam Details: Provides administrative and academic details about the exam for the Basics of Robotics course.
- Part A: Answer all Questions: Contains mandatory questions covering the fundamentals of robotics, including SCARA robots and hydraulic actuators.
- Part B: Answer any Five: Lists questions requiring discussion and description of robotic models and movements, offering partial choice to students.
- Part C: Answer any Three: Involves in-depth analysis questions about robotic actuators and manipulator configurations, providing advanced problem-solving opportunities.