You might also like
- Akash Neet Question Bank PDFDocument440 pagesAkash Neet Question Bank PDFUday Prakash Sahu75% (4)
- TC 10 19 PDFDocument159 pagesTC 10 19 PDFamare addisNo ratings yet
- B&J Fuel InjectionDocument24 pagesB&J Fuel InjectionZeeshan Ahmad100% (1)
- WHO Bio-Safety ManualDocument186 pagesWHO Bio-Safety ManualrggefrmNo ratings yet
- STrait Line Stud Finder ManualDocument1 pageSTrait Line Stud Finder ManualRob BrewsterNo ratings yet
- Manual Book Mov Auma PDFDocument44 pagesManual Book Mov Auma PDFDidi Gunawan100% (1)
- Catalogo SA Ingles AUMADocument32 pagesCatalogo SA Ingles AUMAEsteban Martinez I.No ratings yet
- Presentation On Piezoelectric Energy HarvestingDocument23 pagesPresentation On Piezoelectric Energy Harvestingਮਨਪ੍ਰੀਤ ਸਿੰਘ ਸ਼ੇਰਗਿੱਲ100% (3)
- Particle Size EnlargementDocument8 pagesParticle Size EnlargementZaid Bin GhaziNo ratings yet
- High-Pressure Oil-Injected Rotary Screw Compressors: GR 110-200 (FF) Up To 20 Bar (E) / 290 PsigDocument4 pagesHigh-Pressure Oil-Injected Rotary Screw Compressors: GR 110-200 (FF) Up To 20 Bar (E) / 290 PsigMateusDinizNo ratings yet
- Manual Sillon Olsen PDFDocument14 pagesManual Sillon Olsen PDFbrisaNo ratings yet
- Double Pendulum: PHY 306 Project ReportDocument8 pagesDouble Pendulum: PHY 306 Project ReportYash TandonNo ratings yet
- Double Pendulum PDFDocument7 pagesDouble Pendulum PDFshalukprNo ratings yet
- Laplace TransformDocument12 pagesLaplace Transformedgar100% (1)
- The Double Pendulum - Lagrangian Formulation - Diego AssencioDocument8 pagesThe Double Pendulum - Lagrangian Formulation - Diego AssencioAbril jimenezNo ratings yet
- Chaos in The Double PendulumDocument9 pagesChaos in The Double PendulumThuy LinhNo ratings yet
- Double PendulumDocument7 pagesDouble PendulumIndranil BhattacharyyaNo ratings yet
- Multi-Degree-Of-Freedom SystemsDocument5 pagesMulti-Degree-Of-Freedom SystemsmohanjatinderNo ratings yet
- Double PendulumDocument26 pagesDouble PendulumFALAK FATIMANo ratings yet
- Beat Phenomenon - Vibration - Sys. Analys.Document5 pagesBeat Phenomenon - Vibration - Sys. Analys.Miguel CervantesNo ratings yet
- Coupled oscillators normal modesDocument10 pagesCoupled oscillators normal modesapdpjpNo ratings yet
- Cylinder Rolling on Another CylinderDocument20 pagesCylinder Rolling on Another CylinderGuliguli GuliNo ratings yet
- Vrabel 2020Document19 pagesVrabel 2020René Mboyo KouayepNo ratings yet
- demo_example_problem_1__22March2021Document3 pagesdemo_example_problem_1__22March2021mozesdeheiligeNo ratings yet
- Exp04 CPDocument5 pagesExp04 CPRaghav ChhaparwalNo ratings yet
- Double PendulumDocument16 pagesDouble PendulumDabalee TaaddasaaNo ratings yet
- Application of Lagrange Equations To 2D Double Spring-Pendulum in Generalized CoordinatesDocument15 pagesApplication of Lagrange Equations To 2D Double Spring-Pendulum in Generalized CoordinatesM SRINIVAS RAONo ratings yet
- Fuzzy Control of Double Inverted Pendulum by Using State Varieties Fusion FunctionDocument4 pagesFuzzy Control of Double Inverted Pendulum by Using State Varieties Fusion Functionمحمد المهندسNo ratings yet
- Double Pendulum ModelingDocument3 pagesDouble Pendulum ModelingbediyapNo ratings yet
- Modeling of Two Wheel Balancing RobotDocument7 pagesModeling of Two Wheel Balancing RobotAbdullah AhmedNo ratings yet
- Robotics 150722060709 Lva1 App6891Document26 pagesRobotics 150722060709 Lva1 App6891Samuel AdenijiNo ratings yet
- Assignment1 SolutionDocument16 pagesAssignment1 Solutiondagani ranisamyukthaNo ratings yet
- Classical Mechanics Roll#29Document7 pagesClassical Mechanics Roll#29samreenNo ratings yet
- Wa0014.Document30 pagesWa0014.prathasiselizabethNo ratings yet
- Holzer Method in VibrationsDocument7 pagesHolzer Method in Vibrationsprithvi1212100% (1)
- Tutorial 1Document6 pagesTutorial 1fastman94No ratings yet
- Double PendulumDocument20 pagesDouble Pendulumdaras2684No ratings yet
- Aero 7sem Ae2403nolDocument51 pagesAero 7sem Ae2403nolaaditya91021No ratings yet
- Coupled PendulumDocument6 pagesCoupled Pendulumsachin bhadangNo ratings yet
- Chapter 6Document3 pagesChapter 6inesboumaiza293No ratings yet
- Coupled PendulamsDocument5 pagesCoupled PendulamsHarsh VermaNo ratings yet
- University of She Eld Department of Mechanical Engineering MEC 308: Applied Noise and Vibration Tutorial 1Document13 pagesUniversity of She Eld Department of Mechanical Engineering MEC 308: Applied Noise and Vibration Tutorial 1fastman94No ratings yet
- Stability Control of Double Inverted Pendulum On A Cart Using Full State Feedback With H Infinity and H 2 ControllersDocument14 pagesStability Control of Double Inverted Pendulum On A Cart Using Full State Feedback With H Infinity and H 2 Controllersمحمد المهندسNo ratings yet
- Chapter 6Document8 pagesChapter 6StefanPerendijaNo ratings yet
- Simulation of Inverted Pendulum Using Neural Networks For IdentificationDocument7 pagesSimulation of Inverted Pendulum Using Neural Networks For IdentificationYeshitila HailuNo ratings yet
- Structural Dynamics: 2CE611 by DR S S Mishra, NIT Patna: Rayleigh QuotientDocument7 pagesStructural Dynamics: 2CE611 by DR S S Mishra, NIT Patna: Rayleigh QuotientRoshni TNo ratings yet
- What is the Michelson-Morley ExperimentDocument6 pagesWhat is the Michelson-Morley ExperimentTawhid ShajadNo ratings yet
- Springs and Oscillations: Effective Stiffness and Natural FrequencyDocument20 pagesSprings and Oscillations: Effective Stiffness and Natural FrequencyAbdeta DendanaNo ratings yet
- Engineering Tripos Part IB Mechanics ProblemsDocument16 pagesEngineering Tripos Part IB Mechanics ProblemsluchogilmourNo ratings yet
- ME 553: Advanced VibrationsDocument19 pagesME 553: Advanced VibrationsM Usama SiddiquiNo ratings yet
- Damped and Undamped MotionDocument16 pagesDamped and Undamped MotionWisdom CleverNo ratings yet
- Adding_swingDocument3 pagesAdding_swingmozesdeheiligeNo ratings yet
- 2 CylindersDocument20 pages2 CylindersAAKASH JOONNo ratings yet
- Chapter - 12 - Vibration of Two Degree of Freedom SystemDocument23 pagesChapter - 12 - Vibration of Two Degree of Freedom SystemArsalan IdreesNo ratings yet
- Lec 6Document7 pagesLec 6semabayNo ratings yet
- Lec 6Document8 pagesLec 6Tailan SarubiNo ratings yet
- Carbone PendulumDocument6 pagesCarbone PendulumAdemar Alves TrindadeNo ratings yet
- AFT by UZH 2017 PDFDocument142 pagesAFT by UZH 2017 PDFkevinchu021195No ratings yet
- Homework4 PDFDocument3 pagesHomework4 PDFImron FachrurozyNo ratings yet
- Cylinder Rolling On Another Rolling Cylinder: I I I 2 I I I 1Document20 pagesCylinder Rolling On Another Rolling Cylinder: I I I 2 I I I 1Thomas LafontaineNo ratings yet
- Double PendulumDocument8 pagesDouble PendulumLalu Sahrul HudhaNo ratings yet
- Mathematical Models & Differential EquationsDocument23 pagesMathematical Models & Differential EquationsahmedelebyaryNo ratings yet
- Cylinder Rolling Inside Another Rolling CylinderDocument6 pagesCylinder Rolling Inside Another Rolling Cylinderসামিন সালেকNo ratings yet
- Mit Double PedulumDocument13 pagesMit Double PedulumAntoineNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- The Geometry and Cohomology of Some Simple Shimura Varieties. (AM-151), Volume 151From EverandThe Geometry and Cohomology of Some Simple Shimura Varieties. (AM-151), Volume 151No ratings yet
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- 07 03 2020 11.51.07 PDFDocument1 page07 03 2020 11.51.07 PDFHamza HayatNo ratings yet
- Department of Physics PHY365 - Computational Methods in Physics Spring Semester - 2020 Week-6 (July 13-17)Document1 pageDepartment of Physics PHY365 - Computational Methods in Physics Spring Semester - 2020 Week-6 (July 13-17)Hamza HayatNo ratings yet
- Cauchy's Integral Formula NotesDocument15 pagesCauchy's Integral Formula NotesANIL BERWAL 171100150% (1)
- Core of Yoga: EnglishDocument39 pagesCore of Yoga: EnglishVivekananda KendraNo ratings yet
- Sub-Zero Refrigerator Use & CareDocument44 pagesSub-Zero Refrigerator Use & CarephilaskNo ratings yet
- cs830 A4rdDocument10 pagescs830 A4rdprimero marnezNo ratings yet
- CSTRDocument8 pagesCSTRAathira SNo ratings yet
- NCFPDocument40 pagesNCFPJAY PARIKHNo ratings yet
- Operational Guidelines To Operating MAN B&W 2-Stroke Engines On Distillate FuelsDocument6 pagesOperational Guidelines To Operating MAN B&W 2-Stroke Engines On Distillate FuelsAnonymous XtvvG80zuNo ratings yet
- De Longhi Heating Radiators Provide Quality, Practicality and Environmental BenefitsDocument16 pagesDe Longhi Heating Radiators Provide Quality, Practicality and Environmental BenefitsVladimirNo ratings yet
- Periodic TableDocument23 pagesPeriodic Tabled anjilappaNo ratings yet
- Presentation - Fire Protection Regulations - EnGDocument19 pagesPresentation - Fire Protection Regulations - EnGoctyabrovaNo ratings yet
- Nobels Ab1 Switcher PDFDocument1 pageNobels Ab1 Switcher PDFChristian BrasselNo ratings yet
- Documentación Ziel 400w - Wall Washer 150w PDFDocument250 pagesDocumentación Ziel 400w - Wall Washer 150w PDFJonathanTenorio89No ratings yet
- Finned Tube Heat Exchanger - DetailsDocument7 pagesFinned Tube Heat Exchanger - DetailsSakthi VelNo ratings yet
- Introduction To MEMS Lecture 4Document12 pagesIntroduction To MEMS Lecture 4Vaibhav ChaudharyNo ratings yet
- BS 00489-1999 PDFDocument10 pagesBS 00489-1999 PDFNayan jainNo ratings yet
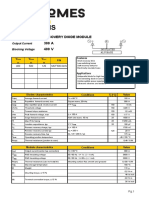
- MCF300.04IS: Insulated Fast Recovery Diode Module 300 A 400 VDocument4 pagesMCF300.04IS: Insulated Fast Recovery Diode Module 300 A 400 VAnonymous nC9gpUWPNo ratings yet
- Astm d5682Document4 pagesAstm d5682Ernesto Morales100% (1)
- PCM Quantization Noise and Digital Communication SystemsDocument8 pagesPCM Quantization Noise and Digital Communication Systemsjaved_hanifNo ratings yet
- Geda Solar CookersDocument15 pagesGeda Solar CookersAnkita DasotNo ratings yet
- Nuclear Proliferation and The NPTDocument20 pagesNuclear Proliferation and The NPTgoricaaaPNo ratings yet
- Clima-8500 Evo - GBDocument2 pagesClima-8500 Evo - GBBig ZevsNo ratings yet