You might also like
- Terramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and DesignFrom EverandTerramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and DesignRating: 5 out of 5 stars5/5 (1)
- Optimal Design of Passenger Car Suspension For Ride and Road HoldingDocument11 pagesOptimal Design of Passenger Car Suspension For Ride and Road HoldingPriscila BarrosNo ratings yet
- Optimum Design of Suspension System of Three-Wheeled Motor VehiclesDocument9 pagesOptimum Design of Suspension System of Three-Wheeled Motor VehiclesShiva HareshNo ratings yet
- Crosswind Sensitivity of Passenger Cars and The Influence of ChassisDocument6 pagesCrosswind Sensitivity of Passenger Cars and The Influence of ChassisInternational Journal of computational Engineering research (IJCER)No ratings yet
- Stroud 2015Document6 pagesStroud 2015Dhananjay SargarNo ratings yet
- Measurement and Analysis of Vehicle Comfort and Road Quality Using Quarter Car ModelDocument8 pagesMeasurement and Analysis of Vehicle Comfort and Road Quality Using Quarter Car ModelChethan GowdaNo ratings yet
- IJSTM17451382214600Document14 pagesIJSTM17451382214600Viraj GaonkarNo ratings yet
- Modal Analysis of Quarter Car Model SuspDocument9 pagesModal Analysis of Quarter Car Model SuspSanjay SanjayNo ratings yet
- Applsci 13 05903Document25 pagesApplsci 13 05903Phạm Hải ĐăngNo ratings yet
- JurnalNX-Whole Body VibrationDocument4 pagesJurnalNX-Whole Body VibrationJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Study On Ride Comfort of Tractor With Tandem Suspension Based On Multi-Body System DynamicsDocument23 pagesStudy On Ride Comfort of Tractor With Tandem Suspension Based On Multi-Body System DynamicsAlexandre Assis Rezende SantosNo ratings yet
- Determination of Damping Coefficient of Automotive Hydraulic Damper Using Sinusoidal TestingDocument10 pagesDetermination of Damping Coefficient of Automotive Hydraulic Damper Using Sinusoidal TestingSourav Kumar SarangiNo ratings yet
- A Simple Mathematical Model of A Vehicle With Seat and Occupant For Studying The Effect of Vehicle Dynamic Parameters On Ride ComfortDocument14 pagesA Simple Mathematical Model of A Vehicle With Seat and Occupant For Studying The Effect of Vehicle Dynamic Parameters On Ride ComfortAhmadMoaazNo ratings yet
- Car Racing in A Simulator: Validation and Assessment of Brake Pedal StiffnessDocument17 pagesCar Racing in A Simulator: Validation and Assessment of Brake Pedal StiffnessVaisakh N NairNo ratings yet
- 347 Binder1 - RideDocument8 pages347 Binder1 - RideReek BhattacharyaNo ratings yet
- Simulation and Experiments On An Isolated Racecar Wheel Rotating in Ground ContactDocument15 pagesSimulation and Experiments On An Isolated Racecar Wheel Rotating in Ground ContactVyssionNo ratings yet
- Genetic algorithm optimizes vehicle suspension parameters for ride comfortDocument12 pagesGenetic algorithm optimizes vehicle suspension parameters for ride comfortCHEN YANG CHUANo ratings yet
- Automotive 6Document12 pagesAutomotive 6Monikashish JaiswalNo ratings yet
- Studies On The Wobble Mode Stability of A Three-Wheeled VehicleDocument10 pagesStudies On The Wobble Mode Stability of A Three-Wheeled VehicleShiva HareshNo ratings yet
- A Comparison of Optimal Semi-Active Suspension SysDocument9 pagesA Comparison of Optimal Semi-Active Suspension SysN'GOLO MAMADOU KONENo ratings yet
- Review of Mcpherson Strut Suspension (Courtesy of Science Direct)Document4 pagesReview of Mcpherson Strut Suspension (Courtesy of Science Direct)Srikar ChinmayaNo ratings yet
- Optimization of Suspension DesignDocument9 pagesOptimization of Suspension Designmult69No ratings yet
- Bayani 2012 J PartIDocument16 pagesBayani 2012 J PartIsherif aboelnourNo ratings yet
- Mcpherson Suspension System - A Review: August 2014Document4 pagesMcpherson Suspension System - A Review: August 2014Zetman Poco90No ratings yet
- Improvements On Safety and Driving Dynamics With A Semi-Active Suspension Equipped Sports CarDocument14 pagesImprovements On Safety and Driving Dynamics With A Semi-Active Suspension Equipped Sports CarJack RyanNo ratings yet
- Mechanical Systems and Signal Processing: Alireza Pazooki, Subhash Rakheja, Dongpu CaoDocument17 pagesMechanical Systems and Signal Processing: Alireza Pazooki, Subhash Rakheja, Dongpu CaoPrakharRastogiNo ratings yet
- Operational Modal Analysis of Tyre Road Interaction Using Abaqus Explicit and Operational Modal AnalysisDocument14 pagesOperational Modal Analysis of Tyre Road Interaction Using Abaqus Explicit and Operational Modal AnalysismatmeanNo ratings yet
- Tyre Effects On Handling Response, (Pulse Steering) 44612222Document11 pagesTyre Effects On Handling Response, (Pulse Steering) 44612222Basil AzeemNo ratings yet
- 11 Chapter 02 PDFDocument28 pages11 Chapter 02 PDFjoel perieraNo ratings yet
- ICRSET'14 Conference PaperDocument8 pagesICRSET'14 Conference PaperAnkitRajNo ratings yet
- 121086Document9 pages121086nimaNo ratings yet
- Analytical Design and Optimization of An AutomotivDocument13 pagesAnalytical Design and Optimization of An AutomotivjaihobabakiNo ratings yet
- Iv2014 6Document6 pagesIv2014 6oussama sadkiNo ratings yet
- Optimal Design of Passenger Car Suspension For RidDocument12 pagesOptimal Design of Passenger Car Suspension For RidAlberto CarbajalNo ratings yet
- A Tool For Lap Time Simulation PDFDocument5 pagesA Tool For Lap Time Simulation PDFRodrigo BobNo ratings yet
- Optimal Braking and Estimation of Tyre Friction in Automotive Vehicles Using Sliding ModesDocument13 pagesOptimal Braking and Estimation of Tyre Friction in Automotive Vehicles Using Sliding ModesmvamsipNo ratings yet
- Test Rig MethodologyDocument12 pagesTest Rig MethodologyKannanKingmakerNo ratings yet
- Vehicle Suspension Systems Control ReviewDocument9 pagesVehicle Suspension Systems Control ReviewVivekDhameliya100% (1)
- Bus Ride Index Refined Approach Evaluating Road IrregularitiesDocument33 pagesBus Ride Index Refined Approach Evaluating Road IrregularitiesSomeone HereNo ratings yet
- Development of semi-active road-friendly truck suspensionsDocument10 pagesDevelopment of semi-active road-friendly truck suspensionsLe ThanhNo ratings yet
- Optimization of Medium Bus Framework Structure With Dynamic Performance LimitsDocument10 pagesOptimization of Medium Bus Framework Structure With Dynamic Performance LimitsTJPRC PublicationsNo ratings yet
- Aerodynamic Analysis of An Isolated Vehicle Wheel: Journal of Physics: Conference SeriesDocument9 pagesAerodynamic Analysis of An Isolated Vehicle Wheel: Journal of Physics: Conference SeriesatilolaNo ratings yet
- Research On Suspension System Based On Genetic Algorithm and Neural Network ControlDocument8 pagesResearch On Suspension System Based On Genetic Algorithm and Neural Network ControlAvinashRaiNo ratings yet
- Design and Development of Longitudinal Vehicle Dynamicsfor An All-Terrain VehicleDocument7 pagesDesign and Development of Longitudinal Vehicle Dynamicsfor An All-Terrain VehiclejszjrNo ratings yet
- 12999-Article Text PDF-56069-1-10-20190521Document11 pages12999-Article Text PDF-56069-1-10-20190521Alexander SenaNo ratings yet
- Modeling and Validation of Off-Road Vehicle Ride DynamicsDocument17 pagesModeling and Validation of Off-Road Vehicle Ride DynamicsAnderson MoribeNo ratings yet
- Engineering Applications of Artificial Intelligence: T. Heyns, J.P. de Villiers, P.S. HeynsDocument9 pagesEngineering Applications of Artificial Intelligence: T. Heyns, J.P. de Villiers, P.S. HeynsDavid Esteban Meneses RendicNo ratings yet
- Investigation On Effect of Hump On A Vehicle Suspension For The Comfortable RideDocument6 pagesInvestigation On Effect of Hump On A Vehicle Suspension For The Comfortable RideanilmechNo ratings yet
- JournalPaperMassGrade FinalDocument28 pagesJournalPaperMassGrade FinalHasan MahmoodNo ratings yet
- Reproducing Real-World Road Profiles for Vehicle TestingDocument10 pagesReproducing Real-World Road Profiles for Vehicle TestingVanHieu LuyenNo ratings yet
- CFD Analysis and Optimization of Geometrical Modifications of Ahmed BodyDocument13 pagesCFD Analysis and Optimization of Geometrical Modifications of Ahmed BodyIOSRjournalNo ratings yet
- The Ride Comfort Vs Handling Compromise For Off-Road VehiclesDocument15 pagesThe Ride Comfort Vs Handling Compromise For Off-Road VehiclesSnjezanaTadicTrifkovicNo ratings yet
- 1 s2.0 S0888327022003193 MainDocument21 pages1 s2.0 S0888327022003193 Mainsamsaptak ghoshNo ratings yet
- 1 Literature ReviewDocument5 pages1 Literature ReviewMohit BansalNo ratings yet
- Relaxed Static Stabillity Basad On Tyre Cornering Stiffness Estimation For All-Wheel-Drive Eletric VehicleDocument9 pagesRelaxed Static Stabillity Basad On Tyre Cornering Stiffness Estimation For All-Wheel-Drive Eletric VehicleTalles OliveiraNo ratings yet
- Energies 15 00393 v2Document29 pagesEnergies 15 00393 v2sikedbruhNo ratings yet
- Driving Cycle Estimation and Validation For Ludhiana City, IndiaDocument7 pagesDriving Cycle Estimation and Validation For Ludhiana City, IndiarakaNo ratings yet
- Selection of Spring For Spring Coil Dampers Using An Iterative ApproachDocument5 pagesSelection of Spring For Spring Coil Dampers Using An Iterative Approach8794 Dimplekunwar SolankiNo ratings yet
- Estimating tire stiffness to classify road surfacesDocument12 pagesEstimating tire stiffness to classify road surfacessherif aboelnourNo ratings yet
- Land Capability Unit of Erosion in Gis Application For Kalikajar District, Wonosobo RegencyDocument6 pagesLand Capability Unit of Erosion in Gis Application For Kalikajar District, Wonosobo Regencyarmeino atanaNo ratings yet
- Garlic As Mosquito RepellentDocument18 pagesGarlic As Mosquito Repellentagnes80% (5)
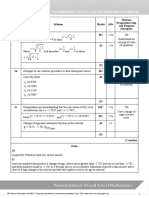
- Mark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Document7 pagesMark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Arthur LongwardNo ratings yet
- SA5000QSG2FDocument2 pagesSA5000QSG2FYuliia TsyhanskaNo ratings yet
- International Case StudyDocument14 pagesInternational Case StudyPriyanka Khadka100% (1)
- Watching A Typhoon Using Sentinel-1Document39 pagesWatching A Typhoon Using Sentinel-1James GulreyNo ratings yet
- Mathematics Reference Books: No. Name Author PublisherDocument1 pageMathematics Reference Books: No. Name Author PublisherDelicateDogNo ratings yet
- Iso 4582 1980Document8 pagesIso 4582 1980Ruwan Sampath WickramathilakaNo ratings yet
- Armstrong ANFDocument2 pagesArmstrong ANFBramandito DamarNo ratings yet
- CASE-STUDY of NFPTs in Butuan CityDocument35 pagesCASE-STUDY of NFPTs in Butuan CityKizza Eyn MinguitaNo ratings yet
- Test 2: Section 1Document5 pagesTest 2: Section 1Wall HarryNo ratings yet
- A. Badal', R. Barbera, A. Bonasera, M. Gulino, A. Palmeri (Auth.), Wolfgang Bauer, Hans-Georg Ritter (Eds.) - Advances in Nuclear Dynamics 4 (1998, Springer US)Document389 pagesA. Badal', R. Barbera, A. Bonasera, M. Gulino, A. Palmeri (Auth.), Wolfgang Bauer, Hans-Georg Ritter (Eds.) - Advances in Nuclear Dynamics 4 (1998, Springer US)ramiphysicsNo ratings yet
- Nuig Lander1Document21 pagesNuig Lander1diana meriakri100% (1)
- LectureNotes8 PDFDocument8 pagesLectureNotes8 PDFGuoXuanChanNo ratings yet
- 2018A4PS0580P Arpan Sharma: Experiment 7 Heat Exchanger - Shell and Tube ObjectiveDocument4 pages2018A4PS0580P Arpan Sharma: Experiment 7 Heat Exchanger - Shell and Tube ObjectiveArpanNo ratings yet
- Renowned Professors in RussiaDocument5 pagesRenowned Professors in RussiaAfias Thomas MatheNo ratings yet
- 107 - Low Stretch Rope - 2018Document5 pages107 - Low Stretch Rope - 2018Dusan CincarNo ratings yet
- CorpusRembrandt 3Document819 pagesCorpusRembrandt 3Yuliya UdotNo ratings yet
- Hiwin Gen Ballscrew Catalogue EngDocument178 pagesHiwin Gen Ballscrew Catalogue EngValeriy KobaNo ratings yet
- What Is A Gas CompressorDocument5 pagesWhat Is A Gas CompressorI AM NOT CHINESENo ratings yet
- Marketing Management Case Study AssignmentDocument19 pagesMarketing Management Case Study AssignmentSZANo ratings yet
- Current TransformerDocument12 pagesCurrent TransformerSyed AbbasNo ratings yet
- CMC 63rd Batch Class Routine for Thorax CardDocument5 pagesCMC 63rd Batch Class Routine for Thorax CardMath NewNo ratings yet
- ESE 601 Week 4 Assignment Universal Learning Characteristic1Document5 pagesESE 601 Week 4 Assignment Universal Learning Characteristic1Homeworkhelpbylance0% (1)
- Sets ProbabilityDocument33 pagesSets ProbabilityGaithNo ratings yet
- Automatic Bus Suspension PID Controller DesignDocument50 pagesAutomatic Bus Suspension PID Controller Designchuhuynh100% (1)
- Warehouse SimulationDocument14 pagesWarehouse SimulationRISHAB KABDI JAINNo ratings yet
- LEED AP ND Candidate Handbook - SFLBDocument32 pagesLEED AP ND Candidate Handbook - SFLBPERVEZ AHMAD KHANNo ratings yet
- Inovasi Kurikulum Berdasarkan Komponen Kurikulum Strategi Dan Evaluasi Oleh: Sri MaryatiDocument16 pagesInovasi Kurikulum Berdasarkan Komponen Kurikulum Strategi Dan Evaluasi Oleh: Sri MaryatiFitroh NailulNo ratings yet
- Syracuse Vision Plan After Removal of I-81Document57 pagesSyracuse Vision Plan After Removal of I-81jlammersNo ratings yet