You might also like
- Measurement and Analysis of Vehicle Comfort and Road QualityDocument8 pagesMeasurement and Analysis of Vehicle Comfort and Road QualityChethan GowdaNo ratings yet
- Measurement of Vibrations Affecting The PDFDocument9 pagesMeasurement of Vibrations Affecting The PDFAlejandro Santos MonterrubioNo ratings yet
- Parametric Analysis of Aerodynamic Characteristics of Launch Vehicles With Strap-On BoostersDocument12 pagesParametric Analysis of Aerodynamic Characteristics of Launch Vehicles With Strap-On Boostersali68fat64No ratings yet
- Evaluation of VDCDocument8 pagesEvaluation of VDCsarba_mihaiNo ratings yet
- Reproduction of Real-World Road Profiles On A Four-Poster Rig For Indoor Vehicle Chassis and Suspension Durability TestingDocument10 pagesReproduction of Real-World Road Profiles On A Four-Poster Rig For Indoor Vehicle Chassis and Suspension Durability TestingVanHieu LuyenNo ratings yet
- Simulation and Experiments On An Isolated Racecar Wheel Rotating in Ground ContactDocument15 pagesSimulation and Experiments On An Isolated Racecar Wheel Rotating in Ground ContactVyssionNo ratings yet
- Adaptive Vehicle Traction Force Control For Intelligent Vehicle Highway Systems IVHSsDocument11 pagesAdaptive Vehicle Traction Force Control For Intelligent Vehicle Highway Systems IVHSsjitenderkumar_goyal28No ratings yet
- Car Fuel Economy Simulation Forecast Method Based On CVT Efficiences Measured From Bench TesteDocument17 pagesCar Fuel Economy Simulation Forecast Method Based On CVT Efficiences Measured From Bench TestejszjrNo ratings yet
- Comparison Between Vertical Acceleration Data From Acquired Signals and Multibody Model For An Off-Road VehicleDocument9 pagesComparison Between Vertical Acceleration Data From Acquired Signals and Multibody Model For An Off-Road VehicleAnonymous ZC1ld1CLmNo ratings yet
- A Critical Review of Approaches To The Design of Floating-Liner Apparatus For Instantaneous Piston Assembly Friction MeasurementDocument25 pagesA Critical Review of Approaches To The Design of Floating-Liner Apparatus For Instantaneous Piston Assembly Friction MeasurementMahnooshNo ratings yet
- Automotive Buzz, Squeak and Rattle: Mechanisms, Analysis, Evaluation and PreventionFrom EverandAutomotive Buzz, Squeak and Rattle: Mechanisms, Analysis, Evaluation and PreventionRating: 5 out of 5 stars5/5 (3)
- Jung1993-Design Method of Test Road Profile ForVehicle Accelerated Durability TestDocument13 pagesJung1993-Design Method of Test Road Profile ForVehicle Accelerated Durability TesthimmafirdausNo ratings yet
- Hard Point OptimizationDocument8 pagesHard Point OptimizationAnkitRajNo ratings yet
- Mechanical Systems and Signal Processing: N. Roveri, G. Pepe, A. CarcaterraDocument18 pagesMechanical Systems and Signal Processing: N. Roveri, G. Pepe, A. CarcaterraDebashis DashNo ratings yet
- 1996 DanielsonDocument21 pages1996 DanielsonNamelezz ShadowwNo ratings yet
- Brake Roughness - Disc Brake Torque Variation, Rotor Distortion and Vehicle ResponseDocument15 pagesBrake Roughness - Disc Brake Torque Variation, Rotor Distortion and Vehicle Responsedebisi14140100% (1)
- Engineering Applications of Artificial Intelligence: T. Heyns, J.P. de Villiers, P.S. HeynsDocument9 pagesEngineering Applications of Artificial Intelligence: T. Heyns, J.P. de Villiers, P.S. HeynsDavid Esteban Meneses RendicNo ratings yet
- Roll Angle Estimation in Two-Wheeled VehiclesDocument13 pagesRoll Angle Estimation in Two-Wheeled VehiclesTruong Van HoatNo ratings yet
- 2015IDETC VantsevichGray FinalDocument12 pages2015IDETC VantsevichGray FinalHusain KanchwalaNo ratings yet
- 2015IDETC VantsevichGray FinalDocument12 pages2015IDETC VantsevichGray FinalHusain KanchwalaNo ratings yet
- Effect of Sample Unit Size On Visually Examining Pavement Condition For Asphalt-Surfaced RoadsDocument14 pagesEffect of Sample Unit Size On Visually Examining Pavement Condition For Asphalt-Surfaced RoadsAmul ShresthaNo ratings yet
- Applsci 14 01036 v3Document24 pagesApplsci 14 01036 v3Airton Stocco de AlmeidaNo ratings yet
- Application of Ls-Dyna in Numerical Analysis of Vehicle TrajectoriesDocument8 pagesApplication of Ls-Dyna in Numerical Analysis of Vehicle Trajectoriesmehrdad_so1981No ratings yet
- Final Report - PPR223Document47 pagesFinal Report - PPR223iamjithinjoseNo ratings yet
- Bayani 2012 J PartIDocument16 pagesBayani 2012 J PartIsherif aboelnourNo ratings yet
- Heyns Method (2012)Document15 pagesHeyns Method (2012)David Esteban Meneses RendicNo ratings yet
- A Probabilistic Design Methodology For Commercial Aircraft Engine Cycle SelectionDocument9 pagesA Probabilistic Design Methodology For Commercial Aircraft Engine Cycle SelectionHasheem AliNo ratings yet
- A Tire Stiffness Backstepping Observer Dedicated To All-Terrain Vehicle Rollover PreventionDocument19 pagesA Tire Stiffness Backstepping Observer Dedicated To All-Terrain Vehicle Rollover PreventionYash WarkeNo ratings yet
- Futuretransp 01 00033 v3Document24 pagesFuturetransp 01 00033 v3Reinaldo RamírezNo ratings yet
- Pavement Management System Text BookDocument6 pagesPavement Management System Text BookGoutham AthemNo ratings yet
- Viscous-Flow Simulation of An Open-Wheel Race CarDocument9 pagesViscous-Flow Simulation of An Open-Wheel Race CarVyssionNo ratings yet
- Tire Dynamics Research Application Based On ADAMS/Tire: LIU Xi, LIU Fang-GangDocument4 pagesTire Dynamics Research Application Based On ADAMS/Tire: LIU Xi, LIU Fang-GangerpublicationNo ratings yet
- Development of A Driving Cycle For The Measurement ofDocument15 pagesDevelopment of A Driving Cycle For The Measurement ofSatyajit MondalNo ratings yet
- Structural Analysis of A Commercial Vehicle Disc Brake CaliperDocument10 pagesStructural Analysis of A Commercial Vehicle Disc Brake Caliperhimanshu AroraNo ratings yet
- 2013-Investigation of The Influence of Tyre Geometry On The Aerodynamics of Passenger CarsDocument11 pages2013-Investigation of The Influence of Tyre Geometry On The Aerodynamics of Passenger CarsBeyza AlkanNo ratings yet
- Traction-Control-Oriented State Estimation For MotorcyclesDocument8 pagesTraction-Control-Oriented State Estimation For Motorcyclespremkumarreddy_n4922No ratings yet
- Gear Shift Map Design Methodology For Automotive TransmissionsDocument23 pagesGear Shift Map Design Methodology For Automotive TransmissionsKazem salimiNo ratings yet
- Sensors 23 01417 v3Document18 pagesSensors 23 01417 v3sajad soleymanzadeNo ratings yet
- Road Weather Information System Stations - Where and How Many To Install: A Cost Benefit Analysis ApproachDocument11 pagesRoad Weather Information System Stations - Where and How Many To Install: A Cost Benefit Analysis ApproachSimona NicoletaNo ratings yet
- Influence of Camber Angle On Tire Tread Behavior by An On-Board Strain-Based System For Intelligent TiresDocument9 pagesInfluence of Camber Angle On Tire Tread Behavior by An On-Board Strain-Based System For Intelligent TiresAmier AziziNo ratings yet
- Vibration Analysis in The Maritime Shipping Sector - Draft04Document5 pagesVibration Analysis in The Maritime Shipping Sector - Draft04Konstantinos KamarasNo ratings yet
- Piecewise Affine Identification of Tire Longitudinal Properties For Autonomous Driving Control Based On Data-DrivenDocument9 pagesPiecewise Affine Identification of Tire Longitudinal Properties For Autonomous Driving Control Based On Data-DrivenAlpha CourtNo ratings yet
- Journal of Sound and Vibration: Boyu Zhao, Tomonori Nagayama, Kai XueDocument26 pagesJournal of Sound and Vibration: Boyu Zhao, Tomonori Nagayama, Kai XueSteve LegrandNo ratings yet
- ME06 Spoiler With VGsDocument8 pagesME06 Spoiler With VGsariekopriantoNo ratings yet
- Sae Technical Paper Series: P. Khatun, C. M. Bingham and P. H. MellorDocument12 pagesSae Technical Paper Series: P. Khatun, C. M. Bingham and P. H. MellorLe Huy HoangNo ratings yet
- Doumiati11 OnboardRealTimeEstimationofVehicleLateralTireRoad PDFDocument14 pagesDoumiati11 OnboardRealTimeEstimationofVehicleLateralTireRoad PDFDanielaSalas23No ratings yet
- A Tool For Lap Time SimulationDocument5 pagesA Tool For Lap Time SimulationRodrigo BobNo ratings yet
- A Predictive Algorithm For Estimating The Quality of Vehicle Engine OilDocument11 pagesA Predictive Algorithm For Estimating The Quality of Vehicle Engine OilJoseNo ratings yet
- Influence of Tire Operating Conditions On ABS PerformanceDocument27 pagesInfluence of Tire Operating Conditions On ABS Performancesupero huNo ratings yet
- Lubrication Regime Classification of Hydrodynamic Journal Bearings by Machine Learning Using Torque DataDocument15 pagesLubrication Regime Classification of Hydrodynamic Journal Bearings by Machine Learning Using Torque Dataزهراء حيدر ميريNo ratings yet
- Tire Road FrictionDocument9 pagesTire Road Frictionamansax77No ratings yet
- Sensors: Vehicle Dynamic Prediction Systems With On-Line Identification of Vehicle Parameters and Road ConditionsDocument23 pagesSensors: Vehicle Dynamic Prediction Systems With On-Line Identification of Vehicle Parameters and Road ConditionsjosueNo ratings yet
- Integrated Longitudinal and Lateral Tire Road Friction Modeling and Monitoring For Vehicle Motion Control PDFDocument19 pagesIntegrated Longitudinal and Lateral Tire Road Friction Modeling and Monitoring For Vehicle Motion Control PDFDeb PradhanNo ratings yet
- Crosswind Sensitivity of Passenger Cars and The Influence of ChassisDocument6 pagesCrosswind Sensitivity of Passenger Cars and The Influence of ChassisInternational Journal of computational Engineering research (IJCER)No ratings yet
- Sensors: A Novel Method For Determining Angular Speed and Acceleration Using Sin-Cos EncodersDocument21 pagesSensors: A Novel Method For Determining Angular Speed and Acceleration Using Sin-Cos EncodersName24122021No ratings yet
- Automated Decision Making in Highway Pavement Preventive Maintenance Based on Deep Learning-维护-226145Document19 pagesAutomated Decision Making in Highway Pavement Preventive Maintenance Based on Deep Learning-维护-226145Yuan ChowNo ratings yet
- Road Condition Monitoring Using On-Board Three-Axis Accelerometer and GPS SensorDocument12 pagesRoad Condition Monitoring Using On-Board Three-Axis Accelerometer and GPS SensorSuhas NaikNo ratings yet
- Design and Development of Longitudinal Vehicle Dynamicsfor An All-Terrain VehicleDocument7 pagesDesign and Development of Longitudinal Vehicle Dynamicsfor An All-Terrain VehiclejszjrNo ratings yet
- Perspectives On Railway Track Geometry Condition Monitoring From in Service Railway VehiclesDocument30 pagesPerspectives On Railway Track Geometry Condition Monitoring From in Service Railway VehiclesDanteNo ratings yet
- Influence of Measurement Conditions On Results of A Wheel Geometry CheckDocument10 pagesInfluence of Measurement Conditions On Results of A Wheel Geometry CheckESHETU SILESHINo ratings yet
- Road Conditon SensorDocument4 pagesRoad Conditon Sensorsherif aboelnourNo ratings yet
- Bayani 2012 J PartIDocument16 pagesBayani 2012 J PartIsherif aboelnourNo ratings yet
- ACEA Road SafetyDocument8 pagesACEA Road Safetysherif aboelnourNo ratings yet
- Bayani 2012 J PartIDocument16 pagesBayani 2012 J PartIsherif aboelnourNo ratings yet
- Research On The Control and Coordination of Four-Wheel Independent Driving/steering Electric VehicleDocument13 pagesResearch On The Control and Coordination of Four-Wheel Independent Driving/steering Electric Vehiclesherif aboelnourNo ratings yet
- Tables: List of Tables or FiguresDocument1 pageTables: List of Tables or FiguresPragya BharatiNo ratings yet
- Determination of Vehicle COGDocument5 pagesDetermination of Vehicle COGrmarsh21730No ratings yet
- Journal On Four Wheel SteeringDocument6 pagesJournal On Four Wheel SteeringJithendracs NaduvikkaraNo ratings yet
- Technical Data: Program For Germany Engine / ElectricsDocument2 pagesTechnical Data: Program For Germany Engine / Electricssherif aboelnourNo ratings yet
- Technical Data - Audi A4 1.4 TFSI S Tronic (110 KW) : Engine / ElectronicsDocument1 pageTechnical Data - Audi A4 1.4 TFSI S Tronic (110 KW) : Engine / Electronicssherif aboelnourNo ratings yet
- Paper On Calculation PDFDocument5 pagesPaper On Calculation PDFAnonymous Gm9VGRmVoNo ratings yet
- A Simple Way To Measure Understeer GradientDocument3 pagesA Simple Way To Measure Understeer Gradientsherif aboelnourNo ratings yet
- Neubekanntmachung - MaPO ME - Clean - ENDocument7 pagesNeubekanntmachung - MaPO ME - Clean - ENsherif aboelnourNo ratings yet
- Fromtheoctopustosoftrobotscontrol AnoctopusinspiredbehaviorcontrolarchitectureforsoftrobotsDocument8 pagesFromtheoctopustosoftrobotscontrol Anoctopusinspiredbehaviorcontrolarchitectureforsoftrobotssherif aboelnourNo ratings yet
- S-Turns: Objective: This ManeuverDocument7 pagesS-Turns: Objective: This ManeuverSantiago Zuluaga HerreraNo ratings yet
- EASA CS-22 Certification of SailplanesDocument120 pagesEASA CS-22 Certification of SailplanessnorrigNo ratings yet
- Real Smolensk Technical Report enDocument65 pagesReal Smolensk Technical Report enamadar1No ratings yet
- Piper Seminole PA-44-180 Training GuideDocument17 pagesPiper Seminole PA-44-180 Training GuideRodrigo SoriaNo ratings yet
- Private Pilot Maneuvers C172Document26 pagesPrivate Pilot Maneuvers C172Yves LavrillouxNo ratings yet
- ESI-1000 Pilots GuideDocument48 pagesESI-1000 Pilots GuideElio CollazoNo ratings yet
- Mini Project Report V2.0 Updated 1Document43 pagesMini Project Report V2.0 Updated 1Tanishq ShettyNo ratings yet
- Ready For Take Off W KeyDocument123 pagesReady For Take Off W KeyMaria Hogan100% (1)
- Vehi Steering Dynamic CalculationsDocument6 pagesVehi Steering Dynamic CalculationsYash WarkeNo ratings yet
- Standardized Flight Maneuvers Guide (C - 172RG) : June 2006Document24 pagesStandardized Flight Maneuvers Guide (C - 172RG) : June 2006labrat1123100% (1)
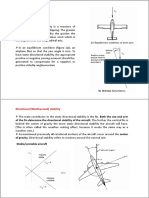
- AULA - EstabilidadeDocument14 pagesAULA - Estabilidadelilibeth Suarez reyesNo ratings yet
- Flight Test Validation of The Rq-4 Block 20 Global Hawk Aerodynamic and Propulsive ModelsDocument20 pagesFlight Test Validation of The Rq-4 Block 20 Global Hawk Aerodynamic and Propulsive Modelsj dnNo ratings yet
- Jarppl c152 Exercise NotesDocument74 pagesJarppl c152 Exercise NotesMartin NgugiNo ratings yet
- Atr72 AfmDocument402 pagesAtr72 AfmAnonymous 4rEDPV5No ratings yet
- Pell City Squadron - Apr 2012Document18 pagesPell City Squadron - Apr 2012CAP Unit Newsletters100% (1)
- UCM Aviation: Multi-Engine Training Performance & LimitationsDocument20 pagesUCM Aviation: Multi-Engine Training Performance & LimitationsKedamawi RecordsNo ratings yet
- Bma4723 Vehicle Dynamics Chap 6Document35 pagesBma4723 Vehicle Dynamics Chap 6Fu HongNo ratings yet
- Module 11 - Aeroplane Aerodynamics, Structure and Systems: Aviation Training HubDocument583 pagesModule 11 - Aeroplane Aerodynamics, Structure and Systems: Aviation Training Hubhaider aliNo ratings yet
- Vehicle DynamicsDocument158 pagesVehicle Dynamicsadravid100% (3)
- Aircraft Paper F15Document32 pagesAircraft Paper F15arnoldolis100% (2)
- Unusual Attitudes and The Aerodynamics of Maneuvering Flight - Flight Lab PDFDocument215 pagesUnusual Attitudes and The Aerodynamics of Maneuvering Flight - Flight Lab PDFAllison JacobsonNo ratings yet
- Tire Model For Turn Slip Properties: ArticleDocument10 pagesTire Model For Turn Slip Properties: Articlesonu_manjhiNo ratings yet
- Ex.4 Effect of ControlsDocument36 pagesEx.4 Effect of ControlsRocky WilliamsNo ratings yet
- Maquette Avion Cessna Pour 6emeDocument43 pagesMaquette Avion Cessna Pour 6emejoross s abella100% (3)
- Bombardier CL-600-2B16 Challenger 604 N999PX 01-24Document23 pagesBombardier CL-600-2B16 Challenger 604 N999PX 01-24tayo_bNo ratings yet
- B737 HudDocument202 pagesB737 HudАндрей Кошкош100% (1)
- Car PhysicsDocument27 pagesCar PhysicsHarikrishnan Rajendran0% (1)
- 17ae73 As&c Module-2 ClassDocument47 pages17ae73 As&c Module-2 ClassSanjana ShivaprakashNo ratings yet
- FL Sta Cont 5Document9 pagesFL Sta Cont 5mentcerNo ratings yet
- Airbus Techdata AC A320 - 0523Document432 pagesAirbus Techdata AC A320 - 0523DaveNo ratings yet