You might also like
- AUTOMATED VEHICLE RADAR SYSTEM WITH AUTO-ALIGNMENT FOR AZIMUTH, Elevation and Vehicle Speed Scaling Error PDFDocument19 pagesAUTOMATED VEHICLE RADAR SYSTEM WITH AUTO-ALIGNMENT FOR AZIMUTH, Elevation and Vehicle Speed Scaling Error PDFMarisol HernandezNo ratings yet
- Array Interpolation and Bias Reduction PDFDocument10 pagesArray Interpolation and Bias Reduction PDFMarisol HernandezNo ratings yet
- A New Height-Estimation Method Using FMCW Radar Doppler Beam SharpeningDocument5 pagesA New Height-Estimation Method Using FMCW Radar Doppler Beam SharpeningMarisol HernandezNo ratings yet
- Direction of Arrival Estimation 2.1Document25 pagesDirection of Arrival Estimation 2.1Marisol HernandezNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Electric Field and Ultrasonic Sensor Based Security System PDFDocument4 pagesElectric Field and Ultrasonic Sensor Based Security System PDFHabib Ariffin IsaNo ratings yet
- EngineeringDocument113 pagesEngineeringGlass-Half-EmptyNo ratings yet
- Ground Investigation - Pre-Drilling at MTR Protection ZoneDocument26 pagesGround Investigation - Pre-Drilling at MTR Protection ZoneMan Ho LamNo ratings yet
- Making A Quick Water Material in 3ds Max.: by Gerardo I. RamirezDocument3 pagesMaking A Quick Water Material in 3ds Max.: by Gerardo I. Ramirezpalanisamy744No ratings yet
- MSC Thesis - Stock Trend Prediction Using News ArticleDocument165 pagesMSC Thesis - Stock Trend Prediction Using News ArticlepankajpandeylkoNo ratings yet
- Cad/Cam Softwares: A Presentaton OnDocument35 pagesCad/Cam Softwares: A Presentaton OnVaibhav AroraNo ratings yet
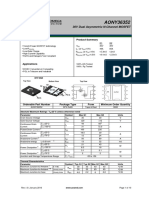
- AONY36352: 30V Dual Asymmetric N-Channel MOSFETDocument10 pagesAONY36352: 30V Dual Asymmetric N-Channel MOSFETrobertjavi1983No ratings yet
- 5 Pengenalan OSDocument44 pages5 Pengenalan OSFahrul WahidNo ratings yet
- Stepping Heavenward by Prentiss, E. (Elizabeth), 1818-1878Document181 pagesStepping Heavenward by Prentiss, E. (Elizabeth), 1818-1878Gutenberg.orgNo ratings yet
- Twitter Vs NewspapersDocument2 pagesTwitter Vs NewspapersManuel RangelNo ratings yet
- 3BHS233287 E80 AbbDocument15 pages3BHS233287 E80 Abbsabah nooriNo ratings yet
- Crisp and ClearDocument5 pagesCrisp and ClearsandeepNo ratings yet
- Jay ValentineDocument9 pagesJay Valentinechrisdmello17No ratings yet
- Parent QuestionnaireDocument2 pagesParent QuestionnaireJoaquinNo ratings yet
- ShipmentsDocument1 pageShipmentsAlif Moechyiddin SugiartoNo ratings yet
- Dm1 Introduction ML Data MiningDocument39 pagesDm1 Introduction ML Data MiningSubir RanjanNo ratings yet
- Mazda 6 CY VM4290A PDFDocument9 pagesMazda 6 CY VM4290A PDFJulian RuizNo ratings yet
- Stem5 Pluto RRLDocument10 pagesStem5 Pluto RRLRosedel BarlongayNo ratings yet
- Abstract ClassDocument15 pagesAbstract ClassSachin IgoorNo ratings yet
- Wagner WM-4 Loader Installation and Operation InstructionsDocument0 pagesWagner WM-4 Loader Installation and Operation Instructionslulu3232No ratings yet
- Readme Eng 2.5Document4 pagesReadme Eng 2.5Stephen OndiekNo ratings yet
- 2015 03 21a Mba Self-StudyDocument8 pages2015 03 21a Mba Self-Studyapi-265932575No ratings yet
- Ec8071 Cognitive Radio: Diploma, Anna Univ UG & PG CoursesDocument2 pagesEc8071 Cognitive Radio: Diploma, Anna Univ UG & PG CoursesBALAKRISHNANNo ratings yet
- Nebula - 150 User ManualDocument94 pagesNebula - 150 User ManualSamuel MongeNo ratings yet
- Harvard Apparatus, Model 44 Syringe Pump User ManualDocument56 pagesHarvard Apparatus, Model 44 Syringe Pump User ManualthynameisraymondNo ratings yet
- Best Lesson PlanDocument4 pagesBest Lesson Planapi-398545121No ratings yet
- 2 - Site Crisis Management Plan TemplateDocument42 pages2 - Site Crisis Management Plan Templatesentryx1100% (7)
- ADMS Assignment Spring 2011Document8 pagesADMS Assignment Spring 2011muneermuhammadNo ratings yet
- How To Get Unlimited Time in Internet Café's PDFDocument1 pageHow To Get Unlimited Time in Internet Café's PDFbkchoudhury1993No ratings yet
- Target Market Profile WorksheetDocument6 pagesTarget Market Profile WorksheetMabel WilliamNo ratings yet