You might also like
- Machine Tool Feed DrivesDocument18 pagesMachine Tool Feed DrivesDoris ParaschivNo ratings yet
- Machine tools circular tests for bore machiningDocument15 pagesMachine tools circular tests for bore machiningsimioncristescuNo ratings yet
- Spindle DeflectionDocument8 pagesSpindle DeflectionFabrizio GrassoNo ratings yet
- Including Geometric Feature Variations in Tolerance Analysis of Mechanical AssembliesDocument32 pagesIncluding Geometric Feature Variations in Tolerance Analysis of Mechanical AssembliessharanabkNo ratings yet
- Bearing Fault Detection Techniques - A Review: Nabhan, A., Nouby, M., Sami, A.M., Mousa, M.ODocument18 pagesBearing Fault Detection Techniques - A Review: Nabhan, A., Nouby, M., Sami, A.M., Mousa, M.ObeingraviNo ratings yet
- 07 VogelDocument10 pages07 VogelAnonymous OFwyjaMyNo ratings yet
- Geometric and Force Errors Compensation in A 3-Axis CNC Milling MachineDocument16 pagesGeometric and Force Errors Compensation in A 3-Axis CNC Milling MachineDarminsyah AshterNo ratings yet
- Including Geometric Feature Variations in Tolerance Analysis of Mechanical AssembliesDocument32 pagesIncluding Geometric Feature Variations in Tolerance Analysis of Mechanical AssembliesnaveenNo ratings yet
- Position Measurement On Machine ToolsDocument13 pagesPosition Measurement On Machine ToolsAriel GermainNo ratings yet
- Detecting machine unbalance using shaft deflection measurementsDocument13 pagesDetecting machine unbalance using shaft deflection measurementsMuhammad Fadel1447798No ratings yet
- Deformation Analysis of a 3-Axis Gantry System Using FEADocument4 pagesDeformation Analysis of a 3-Axis Gantry System Using FEAŽan PjerNo ratings yet
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisFrom EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisNo ratings yet
- Design and Development of Machine Fault Simulator (MFS) For Fault DiagnosisDocument8 pagesDesign and Development of Machine Fault Simulator (MFS) For Fault DiagnosisAnonymous pKuPK3zUNo ratings yet
- Torsional Vibration of Turbomachinery - Duncan N. Walker PDFDocument136 pagesTorsional Vibration of Turbomachinery - Duncan N. Walker PDFkolle_sdestefa100% (1)
- 1.1 Torsional Vibration: Torsional Vibration Involves Angular Oscillations of The Rotors of ADocument6 pages1.1 Torsional Vibration: Torsional Vibration Involves Angular Oscillations of The Rotors of ASç-č AbabiiNo ratings yet
- Mechatronics Module 3-Cnc and Module-4-PlcDocument37 pagesMechatronics Module 3-Cnc and Module-4-PlcRahul DasNo ratings yet
- A Comprehensive System For Computer-Aided Tolerance Analysis of 2-D and 3-D Mechanical AssembliesDocument16 pagesA Comprehensive System For Computer-Aided Tolerance Analysis of 2-D and 3-D Mechanical AssembliesysonuNo ratings yet
- Machine VisionDocument4 pagesMachine Visionharim_meNo ratings yet
- A Report On R-Test Device For Accuracy Measurement On 5 Axis Machine ToolDocument19 pagesA Report On R-Test Device For Accuracy Measurement On 5 Axis Machine ToolShashi Bhushan GunjanNo ratings yet
- Detection of Unbalance in Rotating Machines Using PDFDocument14 pagesDetection of Unbalance in Rotating Machines Using PDFKonstantinos KamarasNo ratings yet
- MS5200 - HW1 - 23123001 - A Review On Geometrical Measurement Methods For Machine ToolsDocument2 pagesMS5200 - HW1 - 23123001 - A Review On Geometrical Measurement Methods For Machine Toolsfakihilham2705No ratings yet
- Detecting Unbalance in Rotating Machines Using Shaft Deflection MeasurementsDocument14 pagesDetecting Unbalance in Rotating Machines Using Shaft Deflection MeasurementsShashi Bhushan KumarNo ratings yet
- Compliant ManipulatorsDocument63 pagesCompliant Manipulators侯涛No ratings yet
- Lecture 14 - ACCEPTANCE TESTDocument24 pagesLecture 14 - ACCEPTANCE TESTMovie 6890No ratings yet
- ASME B89.4.19 Performance Evaluation Tests and Geometric Misalignments in Laser Trackers VolumeDocument15 pagesASME B89.4.19 Performance Evaluation Tests and Geometric Misalignments in Laser Trackers VolumeJDNo ratings yet
- Budak tmt07Document29 pagesBudak tmt07abdollahzadehNo ratings yet
- Structural Modeling of End Mills For Form Error and Stability AnalysisDocument11 pagesStructural Modeling of End Mills For Form Error and Stability AnalysisAkhileshwar_singh88No ratings yet
- Mansoura University Faculty of Engineering: Production Engineering & Mechanical DesignDocument8 pagesMansoura University Faculty of Engineering: Production Engineering & Mechanical DesignAhmed MawrdyNo ratings yet
- Spindle Deflections in High-Speed Machine ToolsDocument8 pagesSpindle Deflections in High-Speed Machine ToolsFabrizio GrassoNo ratings yet
- T T S R B V M S: Esting HE Usceptibility of Olling Earing Ibration Easurement YstemsDocument6 pagesT T S R B V M S: Esting HE Usceptibility of Olling Earing Ibration Easurement YstemsLeilaNo ratings yet
- Engineering Metrology and Measurements N.V. Raghavendra L. KrishnamurthyDocument31 pagesEngineering Metrology and Measurements N.V. Raghavendra L. KrishnamurthyRandøm TalkìêsNo ratings yet
- VLAERODocument2 pagesVLAERORidwan Fadlika100% (1)
- Geometric Errors Compensation of CNC Machine ToolDocument6 pagesGeometric Errors Compensation of CNC Machine ToolnenadNo ratings yet
- Simultaneous Identification of Residual Unbalances and Bearing Dynamic Parameters From Impulse Responses of Rotor-Bearing SystemsDocument25 pagesSimultaneous Identification of Residual Unbalances and Bearing Dynamic Parameters From Impulse Responses of Rotor-Bearing SystemsSiva Srinivas RangavajhalaNo ratings yet
- 1-S2.0-S0888327009002672-Main - Luis EduardoDocument23 pages1-S2.0-S0888327009002672-Main - Luis EduardoLuís EduardoNo ratings yet
- Drill ModelingDocument13 pagesDrill Modelingantonio87No ratings yet
- Geometric and Force Errors Compensation in A 3-Axis CNC Milling MachineDocument9 pagesGeometric and Force Errors Compensation in A 3-Axis CNC Milling Machinerajeev_kumar365No ratings yet
- Methodology: Design of Automatic Floor Dust Cleaning Machine MechanismDocument5 pagesMethodology: Design of Automatic Floor Dust Cleaning Machine MechanismPrashant BachhavNo ratings yet
- Ijri Me 02 0010Document7 pagesIjri Me 02 0010ijripublishersNo ratings yet
- CIRP Annals - Manufacturing Technology: S. Chatti, M. Hermes, A.E. Tekkaya (1), M. KleinerDocument4 pagesCIRP Annals - Manufacturing Technology: S. Chatti, M. Hermes, A.E. Tekkaya (1), M. Kleiner1ere année ingNo ratings yet
- Stability Lobe Diagram For High Speed Machining Processes:Comparison of Experimental and Analytical Methods - A ReviewDocument6 pagesStability Lobe Diagram For High Speed Machining Processes:Comparison of Experimental and Analytical Methods - A ReviewRelu ChiruNo ratings yet
- 09 Chapter1 PDFDocument12 pages09 Chapter1 PDFbilbobaggingsNo ratings yet
- Design of Machine Elements ProjectDocument43 pagesDesign of Machine Elements ProjectGirish ChandankarNo ratings yet
- Five-axis milling centres geometric errorsDocument19 pagesFive-axis milling centres geometric errorsRobinson GonzalezNo ratings yet
- Geometrical Dimensioning and Tolerancing for Design, Manufacturing and Inspection: A Handbook for Geometrical Product Specification Using ISO and ASME StandardsFrom EverandGeometrical Dimensioning and Tolerancing for Design, Manufacturing and Inspection: A Handbook for Geometrical Product Specification Using ISO and ASME StandardsRating: 4.5 out of 5 stars4.5/5 (3)
- Application Note .: Measuring Torsional Operational Deflection Shapes of Rotating ShaftsDocument8 pagesApplication Note .: Measuring Torsional Operational Deflection Shapes of Rotating Shaftsjhon vargasNo ratings yet
- Strategies To Enhance Agility and Machining Accuracy in Line BoringDocument6 pagesStrategies To Enhance Agility and Machining Accuracy in Line BoringRadithya RafeeNo ratings yet
- Modal analysis of a high speed spindle: experimental resultsDocument7 pagesModal analysis of a high speed spindle: experimental resultsnm2007kNo ratings yet
- Modeling GD&T of crankshaft flangeDocument6 pagesModeling GD&T of crankshaft flangeKarthik KarunanidhiNo ratings yet
- CNC New Syllabus TopicsDocument51 pagesCNC New Syllabus TopicsVISMAY PATEL100% (1)
- SPE/IADC 163420 Drillstring Mechanics Model For Surveillance, Root Cause Analysis, and Mitigation of Torsional and Axial VibrationsDocument14 pagesSPE/IADC 163420 Drillstring Mechanics Model For Surveillance, Root Cause Analysis, and Mitigation of Torsional and Axial Vibrationscarloszapata1No ratings yet
- Generation of Functional Tolerancing Based On Positioning FeaturesDocument18 pagesGeneration of Functional Tolerancing Based On Positioning FeatureshalackNo ratings yet
- Research Inventy: International Journal of Engineering and ScienceDocument6 pagesResearch Inventy: International Journal of Engineering and ScienceresearchinventyNo ratings yet
- Paper-Rotating Bending Machine For High Cycle Fatigue TestingDocument7 pagesPaper-Rotating Bending Machine For High Cycle Fatigue TestingAlcidney Valério ChavesNo ratings yet
- Modelingof Worm GearDocument12 pagesModelingof Worm Gearkarthik venkatachalamNo ratings yet
- Applied Metrology for Manufacturing EngineeringFrom EverandApplied Metrology for Manufacturing EngineeringRating: 5 out of 5 stars5/5 (1)
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Bevel ExplanationDocument4 pagesBevel ExplanationVarun VaidyaNo ratings yet
- Certificado - Flange Adapter 125MM - XindaDocument3 pagesCertificado - Flange Adapter 125MM - XindaGR CarlosNo ratings yet
- Circular Motion Week 2Document8 pagesCircular Motion Week 2Solace HusseinNo ratings yet
- USE of Evans & Duncans ChartDocument39 pagesUSE of Evans & Duncans ChartAsif Mostafa AnikNo ratings yet
- Generator Maintenance PM ChecklistDocument2 pagesGenerator Maintenance PM ChecklistEffendiCibuburNo ratings yet
- Wei Gong Lattice Tower Design of Offshore Wind Turbine Support Structures v0Document135 pagesWei Gong Lattice Tower Design of Offshore Wind Turbine Support Structures v0Sachin Sithik50% (2)
- AP05.30-B-0560F.fm Valve Lash Adjustment 19.06.98Document4 pagesAP05.30-B-0560F.fm Valve Lash Adjustment 19.06.98LUKASNo ratings yet
- 5 Desain CVDocument5 pages5 Desain CVInda Sela GifariNo ratings yet
- Pres. 14 (1hr) Blighs TheoryDocument10 pagesPres. 14 (1hr) Blighs TheoryJahanzeb AliNo ratings yet
- Parts of A CarDocument5 pagesParts of A CarMaria MolinaNo ratings yet
- 2014 Miteebite Catalog WebDocument40 pages2014 Miteebite Catalog WebDonald NeislerNo ratings yet
- SamSung CompreSSor SM SeriesDocument8 pagesSamSung CompreSSor SM SeriesmaisheyanNo ratings yet
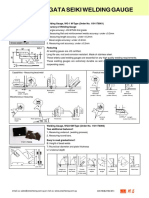
- Niigata Welding GaugeDocument2 pagesNiigata Welding GaugeFriady HalimNo ratings yet
- New Copper Sleeves for Volvo Marine Diesel EnginesDocument3 pagesNew Copper Sleeves for Volvo Marine Diesel EnginesMinaSaeed100% (1)
- Rail Transportation Safety Investigation Report R21C0070Document7 pagesRail Transportation Safety Investigation Report R21C0070CTV CalgaryNo ratings yet
- Mechanism and Robot Kinematics: Anirvan DasguptaDocument122 pagesMechanism and Robot Kinematics: Anirvan Dasguptaसुमित शर्माNo ratings yet
- Manual Motor Crrcpro26iDocument8 pagesManual Motor Crrcpro26ieduardo_albornoz_5No ratings yet
- Design of crane runway girdersDocument4 pagesDesign of crane runway girdersHamdi AslanNo ratings yet
- Piper Arrow checklist guide for pilotsDocument3 pagesPiper Arrow checklist guide for pilotsmichael.s.lacy7874No ratings yet
- Common Causes of Piping VibrationDocument2 pagesCommon Causes of Piping VibrationTg TarroNo ratings yet
- Chief Engineer's Standing Instructions.Document3 pagesChief Engineer's Standing Instructions.prashant manhasNo ratings yet
- PPM High-Strength Anchor Bolt Peikko Group 05-2015Document36 pagesPPM High-Strength Anchor Bolt Peikko Group 05-2015Jody Inggil PambudiNo ratings yet
- Well DiagramDocument2 pagesWell DiagramSanjay KapoorNo ratings yet
- Tractor Operator AgricultureDocument9 pagesTractor Operator AgricultureConstantin CarpenNo ratings yet
- Government of India Ministry of Railways: DraftDocument26 pagesGovernment of India Ministry of Railways: DraftraveenNo ratings yet
- Summary On Uniaxial Ratchetting of 6061-T6 Aluminium AlloyDocument18 pagesSummary On Uniaxial Ratchetting of 6061-T6 Aluminium AlloyautalNo ratings yet
- PortfolioDocument10 pagesPortfolioapi-550329398No ratings yet
- Apex Status - Issue 2 (2-01-2008)Document22 pagesApex Status - Issue 2 (2-01-2008)BorisLundbergNo ratings yet
- Test 1 BFC 43103 Semi I 20202021Document7 pagesTest 1 BFC 43103 Semi I 20202021Mohamad Ridhwan Bin ZahriNo ratings yet
- Racor Oil Filtration Hydraulic Filter Cart 7768Document2 pagesRacor Oil Filtration Hydraulic Filter Cart 7768sinter-musicNo ratings yet