You might also like
- TB6575FNG: PWM Sensorless Controller For 3-Phase Full-Wave BLDC MotorsDocument14 pagesTB6575FNG: PWM Sensorless Controller For 3-Phase Full-Wave BLDC MotorsAudiotec ServiceNo ratings yet
- 16120FPDocument38 pages16120FPCesar EljureNo ratings yet
- SG3525ANDocument8 pagesSG3525ANcommo31No ratings yet
- MB3793 42 PDFDocument23 pagesMB3793 42 PDFBeroxi MihaiNo ratings yet
- 3 Phase Hall Motor Driver Ic: FeaturesDocument12 pages3 Phase Hall Motor Driver Ic: FeaturesSoro FoxNo ratings yet
- SG3526Document12 pagesSG3526pionalabzNo ratings yet
- DatasheetsDocument18 pagesDatasheetsHoii ClarkNo ratings yet
- HA13614FH: Combo (Spindle & VCM) DriverDocument26 pagesHA13614FH: Combo (Spindle & VCM) DriverSa HaNo ratings yet
- Power Voltage Monitoring IC With Watchdog Timer: ASSP For Power Supply ApplicationsDocument23 pagesPower Voltage Monitoring IC With Watchdog Timer: ASSP For Power Supply ApplicationsMuhammad Januar SusantoNo ratings yet
- 5-V Low-Drop Voltage Regulator TLE 4263: FeaturesDocument17 pages5-V Low-Drop Voltage Regulator TLE 4263: FeaturesWelleyNo ratings yet
- HitachiDocument20 pagesHitachiName LastNameNo ratings yet
- MB39A119Document53 pagesMB39A119LưuVănViếtNo ratings yet
- 1ch Boost Up Type White LED Driver For Large LCD: DatasheetDocument37 pages1ch Boost Up Type White LED Driver For Large LCD: DatasheetWeex HRNo ratings yet
- CXD1267AN: CCD Vertical Clock DriverDocument8 pagesCXD1267AN: CCD Vertical Clock DriverTaha OpedNo ratings yet
- Datasheet PDFDocument21 pagesDatasheet PDFpepeluis666No ratings yet
- HCF4541B: Programmable TimerDocument10 pagesHCF4541B: Programmable TimerHector Rafael MirandaNo ratings yet
- Ic409 PS2 MB3889PFTDocument35 pagesIc409 PS2 MB3889PFTacorkeryuNo ratings yet
- HA16654A, HA16664A Series: PWM Controlled Switching RegulatorDocument15 pagesHA16654A, HA16664A Series: PWM Controlled Switching Regulatorphetronyo ferreira de oliveiraNo ratings yet
- 74HCT9046A: 1. General DescriptionDocument43 pages74HCT9046A: 1. General DescriptionDanielNo ratings yet
- Uc3863 Utc U863 PDFDocument9 pagesUc3863 Utc U863 PDFShailesh VajaNo ratings yet
- DatasheetDocument23 pagesDatasheetAfif ArdiyansahNo ratings yet
- Ic409 PS2 Mb39a106 39001Document46 pagesIc409 PS2 Mb39a106 39001acorkeryuNo ratings yet
- SONY,,: For The Availability of This Product, Please Contact The Sales OfficeDocument8 pagesSONY,,: For The Availability of This Product, Please Contact The Sales OfficeERNANIPARNOWNo ratings yet
- TB6564AHQ (THB6064AH) : PWM Chopper-Type Bipolar Stepping Motor Driver ICDocument39 pagesTB6564AHQ (THB6064AH) : PWM Chopper-Type Bipolar Stepping Motor Driver ICTran Duc IOTNo ratings yet
- TB6564AHQ (THB6064AH) : PWM Chopper-Type Bipolar Stepping Motor Driver ICDocument39 pagesTB6564AHQ (THB6064AH) : PWM Chopper-Type Bipolar Stepping Motor Driver ICTran Duc IOTNo ratings yet
- TB6600HG: PWM Chopper-Type Bipolar Stepping Motor Driver ICDocument34 pagesTB6600HG: PWM Chopper-Type Bipolar Stepping Motor Driver ICVictor Manuel Jeronimo RodriguezNo ratings yet
- TB6600HG PWM Chopper Type Bipolar Stepping Motor IC DriverDocument32 pagesTB6600HG PWM Chopper Type Bipolar Stepping Motor IC DrivertherojecasNo ratings yet
- UC3842B AmericanFirstSemiconductor PDFDocument16 pagesUC3842B AmericanFirstSemiconductor PDFWassim LajmiNo ratings yet
- 6脚电源IC资料及代换Document7 pages6脚电源IC资料及代换Justin NgNo ratings yet
- FUJITSU 1.2GHz PLL Frequency Synthesizer Data SheetDocument26 pagesFUJITSU 1.2GHz PLL Frequency Synthesizer Data SheetherzvaiNo ratings yet
- Single Serial Input PLL Frequency Synthesizer: On-Chip 2.5 GHZ PrescalerDocument24 pagesSingle Serial Input PLL Frequency Synthesizer: On-Chip 2.5 GHZ PrescalerAli BarakatNo ratings yet
- Out Products: Monolithic IC MM192x SeriesDocument16 pagesOut Products: Monolithic IC MM192x SeriesIbrain MoranNo ratings yet
- TCA 785 Phase Control IC for Thyristors, Triacs & TransistorsDocument16 pagesTCA 785 Phase Control IC for Thyristors, Triacs & TransistorsronaldotecnicoNo ratings yet
- TA84007PQ, TA84007SG, TA84007FG: PreliminaryDocument16 pagesTA84007PQ, TA84007SG, TA84007FG: PreliminarywijakesumaNo ratings yet
- TB9000AFGDocument11 pagesTB9000AFGLoengrin MontillaNo ratings yet
- Dual PWM Control IC with SCP/DTC FunctionDocument26 pagesDual PWM Control IC with SCP/DTC Functionmartin sembinelliNo ratings yet
- BA9741Document5 pagesBA9741Abraham RossNo ratings yet
- 4541Document10 pages4541GerardoNo ratings yet
- Confidential: 4-Channel Motor Driver For Portable CD Player Features ApplicationsDocument15 pagesConfidential: 4-Channel Motor Driver For Portable CD Player Features ApplicationsvetchboyNo ratings yet
- DC/DC Converter IC For Charging Li-Ion BatteryDocument33 pagesDC/DC Converter IC For Charging Li-Ion BatteryMaikol DominguezNo ratings yet
- Oscilador de PFC Fuente Toshiba 2A20112SPDocument8 pagesOscilador de PFC Fuente Toshiba 2A20112SPAntonio ChavezNo ratings yet
- UC3848Document12 pagesUC3848isaiasvaNo ratings yet
- TLE 6251 G: High Speed CAN-Transceiver With Wake DetectionDocument32 pagesTLE 6251 G: High Speed CAN-Transceiver With Wake DetectionDragos CezarNo ratings yet
- TA7774P, TA7774F: Stepping Motor Driver IcDocument12 pagesTA7774P, TA7774F: Stepping Motor Driver IcJavier CuraNo ratings yet
- Data Sheet: 74HCT9046ADocument40 pagesData Sheet: 74HCT9046AbezasamiNo ratings yet
- 3842a DatasheetDocument8 pages3842a DatasheetVịnh DemoNo ratings yet
- LMX2322Document14 pagesLMX2322Igo_MichelNo ratings yet
- ML4812CPDocument17 pagesML4812CPIntan LianaNo ratings yet
- FAN8903 (KA3903) : Power Window Motor Control ICDocument16 pagesFAN8903 (KA3903) : Power Window Motor Control ICAhmad YaniNo ratings yet
- UC3843 ChipsWinnerDocument11 pagesUC3843 ChipsWinnerPareNo ratings yet
- L9651 SMART QUAD SWITCH with fault detectionDocument9 pagesL9651 SMART QUAD SWITCH with fault detectionVicenteAlvarezNo ratings yet
- S1F76610 Series CMOS DC/DC Converter (Voltage Doubler / Tripler) & Voltage RegulatorDocument14 pagesS1F76610 Series CMOS DC/DC Converter (Voltage Doubler / Tripler) & Voltage RegulatorAndyNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- 23XRV Catálogo ComercialDocument2 pages23XRV Catálogo ComercialjicoelhoNo ratings yet
- 23XRV Catálogo ComercialDocument2 pages23XRV Catálogo ComercialjicoelhoNo ratings yet
- TD62064APG, TD62064AFG: 4ch High-Current Darlington Sink DriverDocument11 pagesTD62064APG, TD62064AFG: 4ch High-Current Darlington Sink DriverrobertoNo ratings yet
- 23XRV Catálogo ComercialDocument2 pages23XRV Catálogo ComercialjicoelhoNo ratings yet
- Ahr I CertificateDocument1 pageAhr I CertificatewidyaNo ratings yet
- (Abb) Max803 PDFDocument8 pages(Abb) Max803 PDFjicoelhoNo ratings yet
- Mitsubishi Semiconductor Mitsubishi SemiconductorDocument9 pagesMitsubishi Semiconductor Mitsubishi SemiconductorjicoelhoNo ratings yet
- Varistor EPCOSDocument16 pagesVaristor EPCOSFernando NerysNo ratings yet
- Acs 1026Document11 pagesAcs 1026José InácioNo ratings yet
- Mitsubishi Semiconductor Mitsubishi SemiconductorDocument9 pagesMitsubishi Semiconductor Mitsubishi SemiconductorjicoelhoNo ratings yet
- SEMICONDUCTOR TECHNICAL DATA SHEETDocument6 pagesSEMICONDUCTOR TECHNICAL DATA SHEETjicoelhoNo ratings yet
- Office Machine Programmable Controllers Ac / DC Input Module TelecommunicationDocument9 pagesOffice Machine Programmable Controllers Ac / DC Input Module TelecommunicationjicoelhoNo ratings yet
- GSIB2020 Thru GSIB2080: Vishay General SemiconductorDocument4 pagesGSIB2020 Thru GSIB2080: Vishay General SemiconductorjicoelhoNo ratings yet
- TB6575FNG: PreliminaryDocument13 pagesTB6575FNG: PreliminaryjicoelhoNo ratings yet
- Office Machine Programmable Controllers Ac / DC Input Module TelecommunicationDocument9 pagesOffice Machine Programmable Controllers Ac / DC Input Module TelecommunicationjicoelhoNo ratings yet
- DatasheetDocument5 pagesDatasheetandresNo ratings yet
- Varistor EPCOSDocument16 pagesVaristor EPCOSFernando NerysNo ratings yet
- Data Sheet of Ic Uc 3844 Part1Document12 pagesData Sheet of Ic Uc 3844 Part1Santosh KumarNo ratings yet
- Data Sheet of Ic Uc 3844 Part1Document12 pagesData Sheet of Ic Uc 3844 Part1Santosh KumarNo ratings yet
- DatasheetDocument5 pagesDatasheetandresNo ratings yet
- Mitsubishi Semiconductor Mitsubishi SemiconductorDocument9 pagesMitsubishi Semiconductor Mitsubishi SemiconductorjicoelhoNo ratings yet
- BAS19, BAS20, BAS21: Vishay SemiconductorsDocument4 pagesBAS19, BAS20, BAS21: Vishay SemiconductorsjicoelhoNo ratings yet
- Taiwan Semiconductor: Description FeaturesDocument7 pagesTaiwan Semiconductor: Description FeaturesjicoelhoNo ratings yet
- Pc817 DatasheetDocument5 pagesPc817 DatasheetprincebahariNo ratings yet
- GSIB2020 Thru GSIB2080: Vishay General SemiconductorDocument4 pagesGSIB2020 Thru GSIB2080: Vishay General SemiconductorjicoelhoNo ratings yet
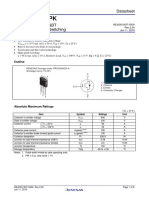
- Rjh60F7Adpk: DatasheetDocument7 pagesRjh60F7Adpk: DatasheetjicoelhoNo ratings yet
- Low Noise, Low Power PWM Controller ICDocument2 pagesLow Noise, Low Power PWM Controller ICHernan GomezNo ratings yet
- Data Shhet Timer Es1Document5 pagesData Shhet Timer Es1Ganep Ismaya WijayaNo ratings yet
- C8050 PDFDocument2 pagesC8050 PDFjicoelhoNo ratings yet
- Acoustical Design For ArchitectsDocument30 pagesAcoustical Design For Architectsval9780No ratings yet
- GEO-Instruments Vibrating Wire Piezometer: Installation MethodsDocument2 pagesGEO-Instruments Vibrating Wire Piezometer: Installation MethodsnembamoteNo ratings yet
- Lecture 4 - Optical Fiber Waveguides Ray Theory Part - 1Document9 pagesLecture 4 - Optical Fiber Waveguides Ray Theory Part - 1samarthNo ratings yet
- VFD NewDocument2 pagesVFD NewankitNo ratings yet
- Khulna University of Engineering and Technology Khulna-9203, BangladeshDocument10 pagesKhulna University of Engineering and Technology Khulna-9203, Bangladesh069 THASIN MOHAMMAD ZAMAN19No ratings yet
- The Medicine of SoundDocument18 pagesThe Medicine of SoundAsh Kumar100% (1)
- Form 2 19 Sound WavesDocument32 pagesForm 2 19 Sound WavesMAGDALENE MWANGANGINo ratings yet
- Tuning Fork LabDocument3 pagesTuning Fork LabAidan ChunNo ratings yet
- Strong Motion Record Processing For The Peer CenterDocument12 pagesStrong Motion Record Processing For The Peer CenteroadmseNo ratings yet
- Therapeutic Modalities in Rehabilitation, Fourth EditionDocument1,263 pagesTherapeutic Modalities in Rehabilitation, Fourth EditionmarianaNo ratings yet
- BTL-2000 Series: User'S Manual & Users'S GuideDocument46 pagesBTL-2000 Series: User'S Manual & Users'S GuideVladimir BorjaNo ratings yet
- Vibrations influence welded joints stressesDocument5 pagesVibrations influence welded joints stressesCenascenascenascenasNo ratings yet
- Problems PDFDocument115 pagesProblems PDFAldika SukmaNo ratings yet
- Digital Waveform:: Rising Edge Falling Edge Edge Non-Ideal PulsesDocument19 pagesDigital Waveform:: Rising Edge Falling Edge Edge Non-Ideal PulsestaylorNo ratings yet
- 7sa511 V3Document16 pages7sa511 V3Jorg Padill Jordan GenielNo ratings yet
- Pendulum Lab PT 2Document4 pagesPendulum Lab PT 2rebbiegNo ratings yet
- Design Horn Antenna Using Hfss 9 1Document106 pagesDesign Horn Antenna Using Hfss 9 1వేలుసామి లింగాసామి100% (1)
- Ch13 Sound WavesDocument18 pagesCh13 Sound WavesJamal RamadanNo ratings yet
- Elcom Pa 08 3Document23 pagesElcom Pa 08 3Cristal CristalNo ratings yet
- P178Document9 pagesP178keepmoshingNo ratings yet
- Science ReviewerDocument1 pageScience ReviewerJames Darren TadeoNo ratings yet
- BELL 870 Radar Detector TestsDocument15 pagesBELL 870 Radar Detector TestsMandu CerianoNo ratings yet
- A Handbook of Sound and VibrationDocument207 pagesA Handbook of Sound and VibrationDan Roy100% (2)
- 02 Physical PrinciplesDocument18 pages02 Physical Principlessaleh100% (1)
- Ultrasonic Testing Training NotesDocument79 pagesUltrasonic Testing Training Notesafnene1No ratings yet
- OR LightDocument14 pagesOR LightZoubir AouagNo ratings yet
- ParameterDocument175 pagesParameterDilip GamiNo ratings yet
- Envelope Signal ProcessingDocument16 pagesEnvelope Signal ProcessingARINDAM138100% (1)
- Elevator Inverter PerformanceDocument8 pagesElevator Inverter PerformanceSamih AlraghbanNo ratings yet
- Cambridge International Advanced Subsidiary and Advanced LevelDocument24 pagesCambridge International Advanced Subsidiary and Advanced LevelHaris RashidNo ratings yet