You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Effect of Multiprinciple Line Protection On Dependability and Security PDFDocument31 pagesThe Effect of Multiprinciple Line Protection On Dependability and Security PDFRodNo ratings yet
- Designing and Testing Precise Time-Distribution SystemsDocument9 pagesDesigning and Testing Precise Time-Distribution SystemsRodNo ratings yet
- Line Current Differential Protection and The Age of Ethernet-Based Wide-Area CommunicationsDocument8 pagesLine Current Differential Protection and The Age of Ethernet-Based Wide-Area CommunicationsRodNo ratings yet
- Adaptive Mho Relay For Synchronous Generator Loss-Of-Excitation Protection A Capability Curve Limit-Based ApproachDocument9 pagesAdaptive Mho Relay For Synchronous Generator Loss-Of-Excitation Protection A Capability Curve Limit-Based ApproachRodNo ratings yet
- A New Method For Determining The Armature Leakage Reactance of Synchronous MachinesDocument1 pageA New Method For Determining The Armature Leakage Reactance of Synchronous MachinesRodNo ratings yet
- Impedance Neutral Grounding Assembly Installation and Maintenance InstructionsDocument10 pagesImpedance Neutral Grounding Assembly Installation and Maintenance InstructionsRodNo ratings yet
- A Practical Method For Calculation of Over-Excited Region in The Synchronous Generator Capability CurvesDocument6 pagesA Practical Method For Calculation of Over-Excited Region in The Synchronous Generator Capability CurvesRodNo ratings yet
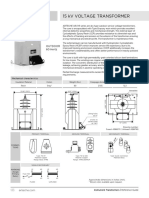
- 15 KV Voltage Transformer: Outdoor 60 HertzDocument2 pages15 KV Voltage Transformer: Outdoor 60 HertzRodNo ratings yet
- Shallco Series 1610 Part No.: 16A10A1-B-1: GeneralDocument1 pageShallco Series 1610 Part No.: 16A10A1-B-1: GeneralRodNo ratings yet
- Iec 60909-2 PDFDocument45 pagesIec 60909-2 PDFRodNo ratings yet
- Crossover List Electroswitch To Shallco Part NumbersDocument39 pagesCrossover List Electroswitch To Shallco Part NumbersRodNo ratings yet
- Type VR Vacuum Circuit Breaker Interruptor Automático Al Vacío Tipo VR Disjoncteur Sous Vide Type VRDocument113 pagesType VR Vacuum Circuit Breaker Interruptor Automático Al Vacío Tipo VR Disjoncteur Sous Vide Type VRRodNo ratings yet
- Shallco Series 1 Auxiliary Switches (MOC and TOC) : ElectricalDocument1 pageShallco Series 1 Auxiliary Switches (MOC and TOC) : ElectricalRodNo ratings yet
- Robust Reliable Flexible: Introducing Heavy Duty Connectors (HDC)Document2 pagesRobust Reliable Flexible: Introducing Heavy Duty Connectors (HDC)RodNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 01-Crystals Fall2012 - Compatibility ModeDocument44 pages01-Crystals Fall2012 - Compatibility Modetrebor sllewNo ratings yet
- A Framework For Digital Filter DesignDocument12 pagesA Framework For Digital Filter Designbalajibs203285No ratings yet
- Rules of Play Game Design Fundamentals PDFDocument3 pagesRules of Play Game Design Fundamentals PDFGrudobranNo ratings yet
- OTS Talk Topputo PDFDocument86 pagesOTS Talk Topputo PDFKorrine LifshitsNo ratings yet
- Test Bank For Inquiry Into Physics 7th Edition Vern J Ostdiek DownloadDocument12 pagesTest Bank For Inquiry Into Physics 7th Edition Vern J Ostdiek Downloadorlaedithhyi5xNo ratings yet
- G10 Math Q1 - Week 5 - Application of SequencesDocument28 pagesG10 Math Q1 - Week 5 - Application of SequencesJerick PaltongNo ratings yet
- Factor Hair Revised Project Report PDFDocument23 pagesFactor Hair Revised Project Report PDFAnkita MishraNo ratings yet
- CAPE Pure Mathematics U1 P2 2023Document25 pagesCAPE Pure Mathematics U1 P2 2023Phoebe CampbellNo ratings yet
- 2022 Nov Final Preboard MathDocument8 pages2022 Nov Final Preboard MathJOHN CARLO DE GUZMAN AMBAY (JCDGA)No ratings yet
- Icbgm 01 jg1Document8 pagesIcbgm 01 jg1Mejbahul SarkerNo ratings yet
- Mayer 2005 Trust in Management and Performance Who Minds The Shop While The Employees Watch The Boss PDFDocument16 pagesMayer 2005 Trust in Management and Performance Who Minds The Shop While The Employees Watch The Boss PDFietje effendiNo ratings yet
- Simulation Premium Nonlinear and Dynamics Package - Training - SOLIDWORKS PDFDocument3 pagesSimulation Premium Nonlinear and Dynamics Package - Training - SOLIDWORKS PDFAjay KumthekarNo ratings yet
- Grade 10-Math DLL Week 3Document11 pagesGrade 10-Math DLL Week 3Nikko PatunganNo ratings yet
- Valores de La Función de Distribución de Poisson:: PX X e KDocument1 pageValores de La Función de Distribución de Poisson:: PX X e KRoxana MurguNo ratings yet
- How Mechanical-Tilt Leads To Antenna Pattern BloomingDocument27 pagesHow Mechanical-Tilt Leads To Antenna Pattern BloomingImran Khan0% (1)
- Math 9 Quarter 4Document12 pagesMath 9 Quarter 4Maria Sadaran100% (1)
- Gaussian PlumesDocument7 pagesGaussian PlumesVeky PamintuNo ratings yet
- REVIEW MATERIAL Basic Calculus Midterm 2023 2024 2Document12 pagesREVIEW MATERIAL Basic Calculus Midterm 2023 2024 2regineNo ratings yet
- Implication of Our Joint Research:: Contemporary Cryptography Next-Generation CryptographyDocument4 pagesImplication of Our Joint Research:: Contemporary Cryptography Next-Generation CryptographyMuhammad SadnoNo ratings yet
- June 2019 Mechanics Shadow Paper 3Document5 pagesJune 2019 Mechanics Shadow Paper 3Yun-lung Wallace NGNo ratings yet
- New Guidance On Fire and Explosion EngineeringDocument11 pagesNew Guidance On Fire and Explosion EngineeringronnelNo ratings yet
- Activity Diagram SymbolsDocument5 pagesActivity Diagram SymbolsElgin Renz Timbreza RociliNo ratings yet
- Unit-2 Vector Calculus NotesDocument28 pagesUnit-2 Vector Calculus NotesRam SinghNo ratings yet
- A Fast Fractal Image Compression Using Huffman Coding: D. Venkatasekhar, P. ArunaDocument4 pagesA Fast Fractal Image Compression Using Huffman Coding: D. Venkatasekhar, P. Arunadiephbuniv8659No ratings yet
- MA-EDUCATION-04Sem-DrDeviPrasad-Educational Measurement and Evaluation-IIDocument20 pagesMA-EDUCATION-04Sem-DrDeviPrasad-Educational Measurement and Evaluation-IIjerzone88No ratings yet
- 7 Yu1973Document23 pages7 Yu1973Rafael SalgadoNo ratings yet
- Cat 3 Class VIIDocument4 pagesCat 3 Class VIISujit SahaNo ratings yet
- The Basics of Analog SensorDocument6 pagesThe Basics of Analog Sensormatrixworld20No ratings yet
- Working With Excel Refreshing Math Skills For ManagementDocument148 pagesWorking With Excel Refreshing Math Skills For ManagementKulbir Singh100% (1)
- Backtesting of Trading Strategies For BitcoinDocument67 pagesBacktesting of Trading Strategies For BitcoinAlaa' Deen Manasra100% (2)