You might also like
- Lm5032 Interleaved Boost Converter: D1 L1 Vin VoutDocument12 pagesLm5032 Interleaved Boost Converter: D1 L1 Vin VoutParvesh GautamNo ratings yet
- Design Battery ChargerDocument20 pagesDesign Battery Chargeranand_girgaonkar100% (1)
- AN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipDocument48 pagesAN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipbmmostefaNo ratings yet
- Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipDocument48 pagesSwitch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipGhulam AbbasNo ratings yet
- Prekidačka NapajanjaDocument48 pagesPrekidačka NapajanjaDamir PranjkovicNo ratings yet
- Nem Relay Based Low Power Design: 1. Literature ReviewDocument10 pagesNem Relay Based Low Power Design: 1. Literature Reviewblessysara16No ratings yet
- An-9014-Fairchild QFET For Synchronous Rectification DC To DC Converters - ImpDocument16 pagesAn-9014-Fairchild QFET For Synchronous Rectification DC To DC Converters - ImpbmmostefaNo ratings yet
- Switch Mode Power SupplyDocument34 pagesSwitch Mode Power Supplyskaarz100% (5)
- Funcionamiento Del 5Q1265RF en La FuenteDocument19 pagesFuncionamiento Del 5Q1265RF en La FuenteJorge Corrales100% (1)
- Boost ConvertersDocument4 pagesBoost ConvertersSyed Mohammad FarooqueNo ratings yet
- Fast, Faster, Fastest!: Optimized Diodes For Switching ApplicationsDocument3 pagesFast, Faster, Fastest!: Optimized Diodes For Switching ApplicationsSrinivasa Rao PottaNo ratings yet
- Low Power High Speed I/O Interfaces in 0.18um CmosDocument4 pagesLow Power High Speed I/O Interfaces in 0.18um Cmosayou_smartNo ratings yet
- Fly BackDocument20 pagesFly BackĐặng Văn TàiNo ratings yet
- DC To DC ConversionDocument8 pagesDC To DC ConversionMichael-Denis NeculaNo ratings yet
- Conduction Loss, PowerDocument13 pagesConduction Loss, PowerMurtaza RizviNo ratings yet
- Theory of Switched Mode Power SupplyDocument21 pagesTheory of Switched Mode Power Supplyseahate100% (1)
- An 4134Document14 pagesAn 4134shri.bhairavkar6977No ratings yet
- Switched Mode Power SupplyDocument153 pagesSwitched Mode Power SupplyIvan222244No ratings yet
- 1000w Inverter PURE SINE WAVE Schematic DiagramDocument153 pages1000w Inverter PURE SINE WAVE Schematic Diagramjeevapillay100% (4)
- Buck Converter Design DemystifiedDocument6 pagesBuck Converter Design DemystifiedEric MorissetNo ratings yet
- Design Concept For A Transformerless Solar Inverter: Renewable PowerDocument3 pagesDesign Concept For A Transformerless Solar Inverter: Renewable Powerzeljkoc21No ratings yet
- Design Concept of Transformerless Solar InverterDocument3 pagesDesign Concept of Transformerless Solar InverterdragonjahirshaNo ratings yet
- UNIT-1 Fundamentals of Low Power VLSI Design Need For Low Power Circuit DesignDocument15 pagesUNIT-1 Fundamentals of Low Power VLSI Design Need For Low Power Circuit DesignPVenkataPuneethhNo ratings yet
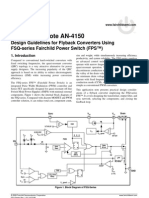
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Document16 pagesApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaNo ratings yet
- Conv DC-DC Paper ENglishDocument5 pagesConv DC-DC Paper ENglishpepe890305No ratings yet
- Choosing Power Switching Devices For SMPS Designs: Mosfets or Igbts?Document6 pagesChoosing Power Switching Devices For SMPS Designs: Mosfets or Igbts?RubenG200No ratings yet
- Design of A Non-Ideal Buck ConverterDocument13 pagesDesign of A Non-Ideal Buck ConverterJames Xgun100% (1)
- Project ReportDocument8 pagesProject Reportسید کاظمی100% (1)
- Design Guideline of AC-DC Converter Using FL6961 & FL6300A For 70W LED LightingDocument13 pagesDesign Guideline of AC-DC Converter Using FL6961 & FL6300A For 70W LED Lightingshiva1luNo ratings yet
- Analog Switches and Multiplexers BasicsDocument23 pagesAnalog Switches and Multiplexers BasicsOfir CzNo ratings yet
- Constant and Green Mode Operation Technique in Flyback and Push-Pull DC-DC ConverterDocument13 pagesConstant and Green Mode Operation Technique in Flyback and Push-Pull DC-DC ConverterIJRASETPublicationsNo ratings yet
- A Comparative Study of π and Split R.docx Paper ReportDocument10 pagesA Comparative Study of π and Split R.docx Paper ReportShubha BaravaniNo ratings yet
- 12 - L-22 (DP) (Pe) ( (Ee) Nptel)Document1 page12 - L-22 (DP) (Pe) ( (Ee) Nptel)CharkNo ratings yet
- Paper Modulacion PWM With AN-42026Document16 pagesPaper Modulacion PWM With AN-42026DuckTronixNo ratings yet
- A Simple Guide To Selecting Power MOSFETsDocument7 pagesA Simple Guide To Selecting Power MOSFETsJUANnn100No ratings yet
- Lin 2013Document12 pagesLin 2013Pavan Singh TomarNo ratings yet
- Inductor Choice Yields Performance Tradeoffs in DC-DC ConvertersDocument9 pagesInductor Choice Yields Performance Tradeoffs in DC-DC ConvertersJonathan JaegerNo ratings yet
- Closed Loop DC-DC Buck ConverterDocument8 pagesClosed Loop DC-DC Buck ConverterKarThiNo ratings yet
- Journal Paper-Design and Development of Compact DC DC ConverterDocument30 pagesJournal Paper-Design and Development of Compact DC DC ConverterSunsets.nNo ratings yet
- Analogue 1 ProjectDocument9 pagesAnalogue 1 ProjectCJ CHNo ratings yet
- A Fold-Back Current Limit Circuit With Load-Insensitive Quiescent Current For CMOS Low Dropout RegulatorDocument4 pagesA Fold-Back Current Limit Circuit With Load-Insensitive Quiescent Current For CMOS Low Dropout Regulatorhjtseng1974No ratings yet
- Basic DC To DCDocument36 pagesBasic DC To DCstrelectronicsNo ratings yet
- Small Power SMP Based TOPSwitchDocument4 pagesSmall Power SMP Based TOPSwitchBunk WahisbullahNo ratings yet
- AN-4102: Colour TV Receiver SMPSDocument16 pagesAN-4102: Colour TV Receiver SMPSshri.bhairavkar6977No ratings yet
- MOSFET Power Losses Calculation Using The Data-Sheet ParametersDocument23 pagesMOSFET Power Losses Calculation Using The Data-Sheet ParametersElvis Yu0% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsFrom EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsRating: 3 out of 5 stars3/5 (2)
- A Guide to Electronic Maintenance and RepairsFrom EverandA Guide to Electronic Maintenance and RepairsRating: 4.5 out of 5 stars4.5/5 (7)
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- MOS Integrated Circuit DesignFrom EverandMOS Integrated Circuit DesignE. WolfendaleNo ratings yet
- High-Efficiency Current Drive For High-Brightness LedsDocument7 pagesHigh-Efficiency Current Drive For High-Brightness LedsLahatem AbdulNo ratings yet
- Johnny C. Bennett Practical Computer Analysis Switch Mode Power Supply WWW - IranSwitching.ir PDFDocument261 pagesJohnny C. Bennett Practical Computer Analysis Switch Mode Power Supply WWW - IranSwitching.ir PDFAlvaro Javier Baños RiveraNo ratings yet
- The FET-OR Connection For Power Supplies: Backup Supply, Battery Operation, diode-OR, MOSFET, Power-Supply SequencingDocument3 pagesThe FET-OR Connection For Power Supplies: Backup Supply, Battery Operation, diode-OR, MOSFET, Power-Supply SequencingJonathan JaegerNo ratings yet
- The Maxim USB Laboratory: MAX3421E, MAX3420E, ARM7, Keil, USB, Host, PeripheralDocument17 pagesThe Maxim USB Laboratory: MAX3421E, MAX3420E, ARM7, Keil, USB, Host, PeripheralJonathan JaegerNo ratings yet
- Stabilizing Thermoelectric Controller (TEC) Loops Using A Unit-Step ResponseDocument4 pagesStabilizing Thermoelectric Controller (TEC) Loops Using A Unit-Step ResponseJonathan JaegerNo ratings yet
- Brocade Switch CookbookDocument197 pagesBrocade Switch CookbookSri Kanta100% (2)
- DAC Makes Controller Programmable: Programmble Voltage, Programmable Controller, Dynamic Voltage, Core VoltageDocument4 pagesDAC Makes Controller Programmable: Programmble Voltage, Programmable Controller, Dynamic Voltage, Core VoltageJonathan JaegerNo ratings yet
- Why Drive White Leds With Constant Current?Document6 pagesWhy Drive White Leds With Constant Current?Jonathan JaegerNo ratings yet
- Integrated DC-DC Converters Save Space and Design Time in Distributed-Power SystemsDocument4 pagesIntegrated DC-DC Converters Save Space and Design Time in Distributed-Power SystemsJonathan JaegerNo ratings yet
- Basic Switching-Regulator-Layout Techniques: GroundDocument8 pagesBasic Switching-Regulator-Layout Techniques: GroundJonathan JaegerNo ratings yet
- Why Drive White Leds With Constant Current?Document6 pagesWhy Drive White Leds With Constant Current?Jonathan JaegerNo ratings yet
- MOSFET Driver Is Reverse-Battery ProtectedDocument2 pagesMOSFET Driver Is Reverse-Battery ProtectedJonathan JaegerNo ratings yet
- An3166 PDFDocument10 pagesAn3166 PDFJonathan JaegerNo ratings yet
- 3A Internal Switch Step-Down Regulators Uses All Ceramic Capacitors For Small FootprintDocument3 pages3A Internal Switch Step-Down Regulators Uses All Ceramic Capacitors For Small FootprintJonathan JaegerNo ratings yet
- Overcurrent/Overdischarge Protection For Lead-Acid BatteriesDocument3 pagesOvercurrent/Overdischarge Protection For Lead-Acid BatteriesJonathan JaegerNo ratings yet
- Trading Performance For Cost in Portable Power Supplies: KeywordsDocument5 pagesTrading Performance For Cost in Portable Power Supplies: KeywordsJonathan JaegerNo ratings yet
- Understanding, Using, and Selecting Hot-Swap ControllersDocument5 pagesUnderstanding, Using, and Selecting Hot-Swap ControllersJonathan JaegerNo ratings yet
- DAC Makes Controller Programmable: Programmble Voltage, Programmable Controller, Dynamic Voltage, Core VoltageDocument4 pagesDAC Makes Controller Programmable: Programmble Voltage, Programmable Controller, Dynamic Voltage, Core VoltageJonathan JaegerNo ratings yet
- An5 PDFDocument2 pagesAn5 PDFJonathan JaegerNo ratings yet
- An5 PDFDocument2 pagesAn5 PDFJonathan JaegerNo ratings yet
- An2018 PDFDocument6 pagesAn2018 PDFJonathan JaegerNo ratings yet
- An2018 PDFDocument6 pagesAn2018 PDFJonathan JaegerNo ratings yet
- Overcurrent/Overdischarge Protection For Lead-Acid BatteriesDocument3 pagesOvercurrent/Overdischarge Protection For Lead-Acid BatteriesJonathan JaegerNo ratings yet
- DC-DC Switch-Mode Power-Supply Controller Drives Regulated Charge PumpDocument4 pagesDC-DC Switch-Mode Power-Supply Controller Drives Regulated Charge PumpJonathan JaegerNo ratings yet
- Understanding, Using, and Selecting Hot-Swap ControllersDocument5 pagesUnderstanding, Using, and Selecting Hot-Swap ControllersJonathan JaegerNo ratings yet
- High-Power Boost Converter Switches Modes Automatically and Maintains Light-Load EfficiencyDocument3 pagesHigh-Power Boost Converter Switches Modes Automatically and Maintains Light-Load EfficiencyJonathan JaegerNo ratings yet
- Simple Circuit Generates Multiple Isolated Supply VoltagesDocument2 pagesSimple Circuit Generates Multiple Isolated Supply VoltagesJonathan JaegerNo ratings yet
- Simple Circuit Generates Multiple Isolated Supply VoltagesDocument2 pagesSimple Circuit Generates Multiple Isolated Supply VoltagesJonathan JaegerNo ratings yet
- Circuit Tradeoffs Minimize Noise in Battery-InputDocument8 pagesCircuit Tradeoffs Minimize Noise in Battery-InputJoaoNo ratings yet
- 5V, Non-Interruptible Power Supply Delivers 1A: UPS, Initerrupted Power Supply, Backup Power Supply, Power SuppliesDocument2 pages5V, Non-Interruptible Power Supply Delivers 1A: UPS, Initerrupted Power Supply, Backup Power Supply, Power SuppliesJonathan JaegerNo ratings yet
- Relay SettingDocument7 pagesRelay Settingsumitsharma2010No ratings yet
- Fluid LabDocument19 pagesFluid LabFu HongNo ratings yet
- 6.circuit & NetworkDocument2 pages6.circuit & NetworkPatel DipenNo ratings yet
- BS7671 Formula and TipsDocument32 pagesBS7671 Formula and TipsjeevanNo ratings yet
- Physics Question PaperDocument45 pagesPhysics Question PaperErwin ElloNo ratings yet
- Why and How Braking Resistors Are Used: Broken Down Into Simpler PiecesDocument7 pagesWhy and How Braking Resistors Are Used: Broken Down Into Simpler PiecesGanesh KumarNo ratings yet
- IGBT Power Module: BSM 100 GB 120 DN2KDocument10 pagesIGBT Power Module: BSM 100 GB 120 DN2KJason JohnsonNo ratings yet
- Effect of Temperature On Magnetic StrengthDocument27 pagesEffect of Temperature On Magnetic Strengthihisulzer57% (7)
- ID FanDocument7 pagesID FanDony RamdhaniNo ratings yet
- Nichrome Wire Heating Element Design Basics PDFDocument7 pagesNichrome Wire Heating Element Design Basics PDFInfant RajNo ratings yet
- Physics - Vol-1 EM PDFDocument320 pagesPhysics - Vol-1 EM PDFParth KulkarniNo ratings yet
- Problem Set 2 DynamicsDocument2 pagesProblem Set 2 DynamicsKent Edve Neil Rabe0% (2)
- DividersDocument7 pagesDividersVenkatesh KarriNo ratings yet
- Physical Constants & Data: U V T S VDocument3 pagesPhysical Constants & Data: U V T S VKrithik RajNo ratings yet
- F. Reif - Statistical Physics - Chapter 1 PDFDocument51 pagesF. Reif - Statistical Physics - Chapter 1 PDFIndrawati WilujengNo ratings yet
- Underwater RoboticsDocument23 pagesUnderwater RoboticsNaman KansalNo ratings yet
- Modern Physics PDFDocument28 pagesModern Physics PDFsampannkumarNo ratings yet
- Dictionary en CRO TechnicalDocument1,105 pagesDictionary en CRO TechnicalKatarina R.M.No ratings yet
- 7pg21 Solkor R RF Catalogue SheetDocument26 pages7pg21 Solkor R RF Catalogue SheetreghusdNo ratings yet
- Tutorial 1 - SolutionDocument2 pagesTutorial 1 - Solutionkant734No ratings yet
- Utiliation AssignmentDocument1 pageUtiliation AssignmentOmprakash VermaNo ratings yet
- Otqs Class 11th Chapter All Combined 1 - 15 (All Questions) 12-10-2019Document142 pagesOtqs Class 11th Chapter All Combined 1 - 15 (All Questions) 12-10-2019Sherin BinuNo ratings yet
- All About Fundamental Physical QuantitiesDocument18 pagesAll About Fundamental Physical Quantitiessreekanthreddy peramNo ratings yet
- UENR2648 - Electrical SchematicDocument2 pagesUENR2648 - Electrical Schematickman548No ratings yet
- Basics of HydraulicsDocument37 pagesBasics of HydraulicsmaniNo ratings yet
- Chapter 11 PDFDocument106 pagesChapter 11 PDFKhaled Al-SwairkiNo ratings yet
- Gce o Level 2011 Physics 5058 Paper 1 SolutionsDocument26 pagesGce o Level 2011 Physics 5058 Paper 1 Solutionsjan12th2004No ratings yet
- Final Lab Report 2 DataDocument17 pagesFinal Lab Report 2 Datapeter vanderNo ratings yet
- Gauss' Law PDFDocument22 pagesGauss' Law PDFPaul BryanNo ratings yet
- Physics - XI - AE - 2020-21 (Ques)Document4 pagesPhysics - XI - AE - 2020-21 (Ques)Ghost AnkanNo ratings yet