You might also like
- Study Notes - Google Project Management Professional CertificateDocument4 pagesStudy Notes - Google Project Management Professional CertificateSWAPNIL100% (1)
- (Problem Books in Mathematics) Antonio Caminha Muniz Neto - An Excursion Through Elementary Mathematics, Volume III - Discrete Mathematics and Polynomial Algebra (2018, Springer)Document647 pages(Problem Books in Mathematics) Antonio Caminha Muniz Neto - An Excursion Through Elementary Mathematics, Volume III - Discrete Mathematics and Polynomial Algebra (2018, Springer)Anonymous iH6noeaX7100% (2)
- OB and Attendance PolicyDocument2 pagesOB and Attendance PolicyAshna MeiNo ratings yet
- English 9 2nd Quarter Answer SheetDocument1 pageEnglish 9 2nd Quarter Answer SheetNate WagaNo ratings yet
- Science 10: (15 Points)Document2 pagesScience 10: (15 Points)Kevin ArnaizNo ratings yet
- 4q Answer Sheets Music Arts Pe HealthDocument10 pages4q Answer Sheets Music Arts Pe HealthIvyang Brion Liponhay BontrostroNo ratings yet
- Science 10: (15 Points)Document2 pagesScience 10: (15 Points)Kevin ArnaizNo ratings yet
- 4 Quarter - Earth Science 7: Answer Sheet Module 5: Solar EclipseDocument2 pages4 Quarter - Earth Science 7: Answer Sheet Module 5: Solar Eclipsevincent baltazarNo ratings yet
- Contemporary Philippine Arts From The Region: Answer SheetDocument1 pageContemporary Philippine Arts From The Region: Answer Sheetbernadette albino100% (2)
- Ipat Answer SheetDocument1 pageIpat Answer SheetJoedNo ratings yet
- Ipat Answer SheetDocument1 pageIpat Answer SheetJoedNo ratings yet
- 3RD Long Test Computer 4 Answer SheetDocument2 pages3RD Long Test Computer 4 Answer SheetRyan John NoblejasNo ratings yet
- Iglesia Ni Cristo Locale of Candelaria District of Quezon: 1 AssesmentDocument2 pagesIglesia Ni Cristo Locale of Candelaria District of Quezon: 1 AssesmentGlen MillarNo ratings yet
- Paper 2: Ops-English - Subjective Questions (90 Marks) Instructions: Answer ALL The Questions. Section A: (20 Marks)Document4 pagesPaper 2: Ops-English - Subjective Questions (90 Marks) Instructions: Answer ALL The Questions. Section A: (20 Marks)KartinaSahariNo ratings yet
- TLE 8-Activity SheetsDocument2 pagesTLE 8-Activity SheetsJeany MilitanteNo ratings yet
- Week 1Document4 pagesWeek 1Sharon PascualNo ratings yet
- Answer Sheet Module 1 Pre CalDocument5 pagesAnswer Sheet Module 1 Pre CalDaine GamiaoNo ratings yet
- Balao National High School: 2 Semester Mid-Term Examination in Physical Education and Health 11Document2 pagesBalao National High School: 2 Semester Mid-Term Examination in Physical Education and Health 11Marthy YhtramNo ratings yet
- 3rd Quarter MAPEH 9 Answer Sheet 2ND WaveDocument2 pages3rd Quarter MAPEH 9 Answer Sheet 2ND WaveBrigitte OpisoNo ratings yet
- 3RD Long Test Character 4 Answer Sheet PDFDocument2 pages3RD Long Test Character 4 Answer Sheet PDFRyan John NoblejasNo ratings yet
- Answer Sheet Science 2nd GradingDocument2 pagesAnswer Sheet Science 2nd Gradingmabel encaboNo ratings yet
- Quiz 1 LanguageDocument1 pageQuiz 1 Languagelovely mae ponciaNo ratings yet
- 3RD Long Test Hele 4 Answer SheetDocument2 pages3RD Long Test Hele 4 Answer SheetRyan John NoblejasNo ratings yet
- NumatDocument1 pageNumatCristhel MacajetoNo ratings yet
- Fish Processing Q1, M1Document2 pagesFish Processing Q1, M1ma.teressa.abanoNo ratings yet
- Baliwagan National High School: Grade 7 Answer SheetDocument1 pageBaliwagan National High School: Grade 7 Answer SheetJoan Vecilla100% (1)
- Pe Quiz 2nd Quarter BasketballDocument2 pagesPe Quiz 2nd Quarter BasketballEmmanuel Louis CruzNo ratings yet
- Exercise Calendar: Art of ConversationDocument4 pagesExercise Calendar: Art of ConversationAyush GossainNo ratings yet
- PARTS OF SLIDE PRESENTATION Activity SheetDocument2 pagesPARTS OF SLIDE PRESENTATION Activity SheetKaren DonatoNo ratings yet
- Pines City National High School Science 10 Quarter 2 Week 1 Answer SheetsDocument8 pagesPines City National High School Science 10 Quarter 2 Week 1 Answer SheetsAaron BalsaNo ratings yet
- Mathemetics 1Document3 pagesMathemetics 1Eve VillartaNo ratings yet
- Icons - Hardware or SoftwareDocument1 pageIcons - Hardware or SoftwareMELAIDA CASTANAR GARIBAYNo ratings yet
- Mod 3Document3 pagesMod 3Kevin ArnaizNo ratings yet
- Answer SheetDocument4 pagesAnswer Sheetjulia sabasNo ratings yet
- Grade 8 Science 2nd Quarter Answer SheetDocument2 pagesGrade 8 Science 2nd Quarter Answer SheetMatt Leon B NavarreteNo ratings yet
- Part I - Exercises: A. The Following Picture Show The Four Stroke Cycle Operation. Fill in The Blank SpacesDocument5 pagesPart I - Exercises: A. The Following Picture Show The Four Stroke Cycle Operation. Fill in The Blank SpacesAna RibeiroNo ratings yet
- TLE 9 - Answer KeyDocument2 pagesTLE 9 - Answer KeyMary Francis Rabutan100% (1)
- 3rd Quarter MAPEH 9 Answer Sheet 1st WaveDocument3 pages3rd Quarter MAPEH 9 Answer Sheet 1st WaveBrigitte OpisoNo ratings yet
- Frog Dissection PreLab WorksheetDocument2 pagesFrog Dissection PreLab WorksheetMeagan SinghNo ratings yet
- Gaisano Mall - Permit Form2 - Div Summit, Inc PDFDocument1 pageGaisano Mall - Permit Form2 - Div Summit, Inc PDFUndo ValenzuelaNo ratings yet
- Must Mustn'tDocument2 pagesMust Mustn'tJanina Jaworski50% (2)
- GRADE 11 READING AND WRITING SKILLS Answer SheetDocument2 pagesGRADE 11 READING AND WRITING SKILLS Answer SheetUel Cabz LaquihonNo ratings yet
- Experiment No 2 Flame TestDocument2 pagesExperiment No 2 Flame TestBalangNo ratings yet
- ANSWER SHEET Week 5-6Document4 pagesANSWER SHEET Week 5-6MaricarDimasNo ratings yet
- Las As Jhs SLM Math10 q1 w1 LfsDocument1 pageLas As Jhs SLM Math10 q1 w1 LfsEMERALD URLANDANo ratings yet
- Student Study Guide 2011Document47 pagesStudent Study Guide 2011Brannon MartinoNo ratings yet
- Europe: Araling Panlipunan 7 - ACTIVITYDocument4 pagesEurope: Araling Panlipunan 7 - ACTIVITYCarlo Troy Acelott ManaloNo ratings yet
- Answer Sheet For Set A Q2Document19 pagesAnswer Sheet For Set A Q2Ma'am Krizia Mae PinedaNo ratings yet
- Prelim Exam 2nd Sem 2021 - Answer SheetDocument5 pagesPrelim Exam 2nd Sem 2021 - Answer SheetAsh Moore MarianoNo ratings yet
- Long Quiz Mapeh q1Document1 pageLong Quiz Mapeh q1Onel PalenciaNo ratings yet
- Phil-IRI Group Screening Answer Sheet Grade - : EnglishDocument2 pagesPhil-IRI Group Screening Answer Sheet Grade - : EnglishAdelin Adjani GarciaNo ratings yet
- 2nd Quarter MAPEH 9 Answer Sheet 2nd WaveDocument3 pages2nd Quarter MAPEH 9 Answer Sheet 2nd WaveBrigitte OpisoNo ratings yet
- Answer SheetDocument5 pagesAnswer SheetangeliNo ratings yet
- Written Work #3 in Math 3: Dinah - Deguzman@deped - Gov.phDocument2 pagesWritten Work #3 in Math 3: Dinah - Deguzman@deped - Gov.phdinah de guzmanNo ratings yet
- 2nd Unit TestDocument7 pages2nd Unit TestFelimon RizanNo ratings yet
- Pre-Assessment 2019Document3 pagesPre-Assessment 2019EU Caylan SolivenNo ratings yet
- PE Test 1.: Identification: Identify The Following 2 Points Each. Write Your Answer On The Space ProvidedDocument4 pagesPE Test 1.: Identification: Identify The Following 2 Points Each. Write Your Answer On The Space ProvidedKelvin MallariNo ratings yet
- MAPEH 9 Answer Sheet 2nd WaveDocument6 pagesMAPEH 9 Answer Sheet 2nd WaveBrigitte OpisoNo ratings yet
- Telling The Time and Preposition of TimeDocument1 pageTelling The Time and Preposition of TimeHillary DominguezNo ratings yet
- Answer Sheet - Module 3 Edukasyon Sa Pagpapakatao (Esp)Document6 pagesAnswer Sheet - Module 3 Edukasyon Sa Pagpapakatao (Esp)razzleliamNo ratings yet
- Sunrays Learning Center Inc.: Unang Markahang Pagsusulit Sa FILIPINO 2 PangalanDocument8 pagesSunrays Learning Center Inc.: Unang Markahang Pagsusulit Sa FILIPINO 2 PangalanElaina JoyNo ratings yet
- Sta. Ana Avenue. Corner Leon Garcia ST., Davao City Tel. No. (082) 303-3078, (082) 295-7219Document4 pagesSta. Ana Avenue. Corner Leon Garcia ST., Davao City Tel. No. (082) 303-3078, (082) 295-7219Jhonel AlbarracinNo ratings yet
- PRELIM Exam Wala Pang LigoDocument3 pagesPRELIM Exam Wala Pang LigoJhonel AlbarracinNo ratings yet
- PRELIM Exam Wala Pang LigoDocument3 pagesPRELIM Exam Wala Pang LigoJhonel AlbarracinNo ratings yet
- Sta. Ana Avenue. Corner Leon Garcia ST., Davao City Tel. No. (082) 303-3078, (082) 295-7219Document3 pagesSta. Ana Avenue. Corner Leon Garcia ST., Davao City Tel. No. (082) 303-3078, (082) 295-7219Jhonel AlbarracinNo ratings yet
- Table of Specification: Form No. Rev. No. 3 Effectivity Aug 2017 1Document1 pageTable of Specification: Form No. Rev. No. 3 Effectivity Aug 2017 1Jhonel AlbarracinNo ratings yet
- Table of Specification: Form No. Rev. No. 3 Effectivity Aug 2017 1Document1 pageTable of Specification: Form No. Rev. No. 3 Effectivity Aug 2017 1Jhonel AlbarracinNo ratings yet
- Table of Specification: Form No. Rev. No. 3 Effectivity Aug 2017 1Document1 pageTable of Specification: Form No. Rev. No. 3 Effectivity Aug 2017 1Jhonel AlbarracinNo ratings yet
- Table of Specification: Form No. Rev. No. 3 Effectivity Aug 2017 1Document1 pageTable of Specification: Form No. Rev. No. 3 Effectivity Aug 2017 1Jhonel AlbarracinNo ratings yet
- 2019-20 Internal School Calendar 2nd SemDocument1 page2019-20 Internal School Calendar 2nd SemJhonel AlbarracinNo ratings yet
- 1-TQ PRELIM PROPULSION I v.2Document4 pages1-TQ PRELIM PROPULSION I v.2Jhonel AlbarracinNo ratings yet
- Table of Specification: Form No. Rev. No. 3 Effectivity Aug 2017 1Document1 pageTable of Specification: Form No. Rev. No. 3 Effectivity Aug 2017 1Jhonel AlbarracinNo ratings yet
- Table of Specification: Form No. Rev. No. 3 Effectivity Aug 2017 1Document1 pageTable of Specification: Form No. Rev. No. 3 Effectivity Aug 2017 1Jhonel AlbarracinNo ratings yet
- Weekly AssignmentDocument1 pageWeekly AssignmentJhonel AlbarracinNo ratings yet
- 1-TQ PRELIM PROPULSION I v.2Document4 pages1-TQ PRELIM PROPULSION I v.2Jhonel AlbarracinNo ratings yet
- 2019-20 Internal School Calendar 2nd SemDocument1 page2019-20 Internal School Calendar 2nd SemJhonel AlbarracinNo ratings yet
- Teamwork Rubric: Category 4 3 2 1 ContributionsDocument1 pageTeamwork Rubric: Category 4 3 2 1 Contributionssarwad3547No ratings yet
- 2020-2021online Class Guidelines PDFDocument3 pages2020-2021online Class Guidelines PDFJhonel AlbarracinNo ratings yet
- Unit-Ii Syllabus: Basic Elements in Solid Waste ManagementDocument14 pagesUnit-Ii Syllabus: Basic Elements in Solid Waste ManagementChaitanya KadambalaNo ratings yet
- GrenTech Express Communication System Introduction 1.0Document30 pagesGrenTech Express Communication System Introduction 1.0Son NguyenNo ratings yet
- 1572 - Anantha Narayanan FFS CalculationDocument1 page1572 - Anantha Narayanan FFS CalculationAnantha NarayananNo ratings yet
- ES Parent Bulletin Vol#19 2012 May 25Document13 pagesES Parent Bulletin Vol#19 2012 May 25International School ManilaNo ratings yet
- Guidelines For Doing Business in Grenada & OECSDocument14 pagesGuidelines For Doing Business in Grenada & OECSCharcoals Caribbean GrillNo ratings yet
- Acer Globalisation ProcessDocument10 pagesAcer Globalisation ProcesscrosstheevilNo ratings yet
- Traffic Survey, Analysis, and ForecastDocument91 pagesTraffic Survey, Analysis, and Forecastsanthosh rajNo ratings yet
- Prediction of CBR From Index Properties of Cohesive Soils: Magdi ZumrawiDocument1 pagePrediction of CBR From Index Properties of Cohesive Soils: Magdi Zumrawidruwid6No ratings yet
- This Is A Short Presentation To Explain The Character of Uncle Sam, Made by Ivo BogoevskiDocument7 pagesThis Is A Short Presentation To Explain The Character of Uncle Sam, Made by Ivo BogoevskiIvo BogoevskiNo ratings yet
- Bagian AwalDocument17 pagesBagian AwalCitra Monalisa LaoliNo ratings yet
- Tata NanoDocument25 pagesTata Nanop01p100% (1)
- DG Oil SpecificationDocument10 pagesDG Oil SpecificationafsalmohmdNo ratings yet
- Celula de CargaDocument2 pagesCelula de CargaDavid PaezNo ratings yet
- Land CrabDocument8 pagesLand CrabGisela Tuk'uchNo ratings yet
- Docket - CDB Batu GajahDocument1 pageDocket - CDB Batu Gajahfatin rabiatul adawiyahNo ratings yet
- Catalogo PukangDocument41 pagesCatalogo PukangClarita Muller LeigueNo ratings yet
- Exclusive GA MCQs For IBPS Clerk MainDocument136 pagesExclusive GA MCQs For IBPS Clerk MainAnkit MauryaNo ratings yet
- 2010 Information ExchangeDocument15 pages2010 Information ExchangeAnastasia RotareanuNo ratings yet
- BarricadeDocument6 pagesBarricadeJithu PappachanNo ratings yet
- Level of Organisation of Protein StructureDocument18 pagesLevel of Organisation of Protein Structureyinghui94No ratings yet
- Initial Police Report: Calamba City Police Station Brgy Real, Calamba City, Laguna E-Mail: 545-1694/545-6789 Loc 8071Document1 pageInitial Police Report: Calamba City Police Station Brgy Real, Calamba City, Laguna E-Mail: 545-1694/545-6789 Loc 8071Jurish BunggoNo ratings yet
- You Can't Blame A FireDocument8 pagesYou Can't Blame A FireMontana QuarterlyNo ratings yet
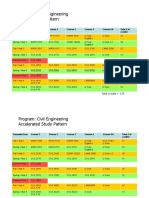
- HKUST 4Y Curriculum Diagram CIVLDocument4 pagesHKUST 4Y Curriculum Diagram CIVLfrevNo ratings yet
- Canon I-SENSYS MF411dw Parts CatalogDocument79 pagesCanon I-SENSYS MF411dw Parts Catalogmarian100% (1)
- Chemical & Ionic Equilibrium Question PaperDocument7 pagesChemical & Ionic Equilibrium Question PapermisostudyNo ratings yet
- Flipkart Labels 06 Jul 2022 09 52Document37 pagesFlipkart Labels 06 Jul 2022 09 52Dharmesh ManiyaNo ratings yet
- Subeeka Akbar Advance NutritionDocument11 pagesSubeeka Akbar Advance NutritionSubeeka AkbarNo ratings yet