You might also like
- Abstract:: Bol. Soc. Paran. Mat. (3s.) v. 00 0 (0000) : ??-??. C SPM - ISSN-2175-1188 On Line ISSN-00378712 in Press SPMDocument13 pagesAbstract:: Bol. Soc. Paran. Mat. (3s.) v. 00 0 (0000) : ??-??. C SPM - ISSN-2175-1188 On Line ISSN-00378712 in Press SPMImportadora Boliviana de MedicamentosNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Julio Garralon, Francisco Rus and Francisco R. Villatora - Radiation in Numerical Compactons From Finite Element MethodsDocument6 pagesJulio Garralon, Francisco Rus and Francisco R. Villatora - Radiation in Numerical Compactons From Finite Element MethodsPomac232No ratings yet
- Special Matrices and Their Applications in Numerical Mathematics: Second EditionFrom EverandSpecial Matrices and Their Applications in Numerical Mathematics: Second EditionRating: 5 out of 5 stars5/5 (1)
- Quadrature Based Optimal Iterative Methods: Corresponding Authors. E-Mails: Sanjay - Khattri@hsh - No, Agarwal@fit - EduDocument9 pagesQuadrature Based Optimal Iterative Methods: Corresponding Authors. E-Mails: Sanjay - Khattri@hsh - No, Agarwal@fit - EduAman MachraNo ratings yet
- 6 New RapDocument4 pages6 New RapImportadora Boliviana de MedicamentosNo ratings yet
- Nonlinear Analysis Forum 17, Pp. 117-122, 2012Document7 pagesNonlinear Analysis Forum 17, Pp. 117-122, 2012Muhammad RafiullahNo ratings yet
- International Journal of Pure and Applied Mathematics No. 1 2014, 85-94Document10 pagesInternational Journal of Pure and Applied Mathematics No. 1 2014, 85-94Importadora Boliviana de MedicamentosNo ratings yet
- Wen You Chen 2020Document14 pagesWen You Chen 2020HAFIZ LAWAL IBRAHIMNo ratings yet
- A Six-Order Variant of Newton's Method For Solving Nonlinear EquationsDocument9 pagesA Six-Order Variant of Newton's Method For Solving Nonlinear EquationsImportadora Boliviana de MedicamentosNo ratings yet
- Axioms: Efficient Two-Step Fifth-Order and Its Higher-Order Algorithms For Solving Nonlinear Systems With ApplicationsDocument17 pagesAxioms: Efficient Two-Step Fifth-Order and Its Higher-Order Algorithms For Solving Nonlinear Systems With ApplicationsCristhian Paúl Neyra SalvadorNo ratings yet
- CLL113 Term Paper PDFDocument8 pagesCLL113 Term Paper PDFpabloNo ratings yet
- DQ+Bspline 1Document24 pagesDQ+Bspline 1Laila FouadNo ratings yet
- On The Numerical Solution of Fractional Partial Differential EquationsDocument12 pagesOn The Numerical Solution of Fractional Partial Differential EquationsAnonymous wJhO5dS9XzNo ratings yet
- Numerical Treatment of Nonlinear Third Order Boundary Value ProblemDocument6 pagesNumerical Treatment of Nonlinear Third Order Boundary Value Problemdebbie131313No ratings yet
- Curved Beams With Elastic Supports. Transfer and Stiffness MatricesDocument6 pagesCurved Beams With Elastic Supports. Transfer and Stiffness MatricesZainab SattarNo ratings yet
- Computers and Mathematics With Applications: Xiuhua Wang, Jisheng Kou, Chuanqing GuDocument6 pagesComputers and Mathematics With Applications: Xiuhua Wang, Jisheng Kou, Chuanqing GuSyed Ubaid ur RehmanNo ratings yet
- Long-Term Prediction of Time Series Using State-Space ModelsDocument11 pagesLong-Term Prediction of Time Series Using State-Space ModelsMurilo CamargosNo ratings yet
- Abstract Poster PDFDocument21 pagesAbstract Poster PDFMohan Kumar100% (1)
- Some Third-Order Modifications of Newton's Method: Bijan Rahimi, Behzad Ghanbari and Mehdi Gholami PorshokouhiDocument8 pagesSome Third-Order Modifications of Newton's Method: Bijan Rahimi, Behzad Ghanbari and Mehdi Gholami PorshokouhiImportadora Boliviana de MedicamentosNo ratings yet
- Root Finding With Engineering Application: PresentationDocument48 pagesRoot Finding With Engineering Application: PresentationElordie WagayenNo ratings yet
- Generalized Pattern Search Methods For A Class of Nonsmooth Optimization Problems With Structure - Bogani (2008)Document11 pagesGeneralized Pattern Search Methods For A Class of Nonsmooth Optimization Problems With Structure - Bogani (2008)Emerson ButynNo ratings yet
- Analisis NumericoDocument4 pagesAnalisis Numericolu casNo ratings yet
- Solving System of Nonlinear Equations by Using Newton Method and Quasi-Newton MethodDocument29 pagesSolving System of Nonlinear Equations by Using Newton Method and Quasi-Newton MethodMaths HubNo ratings yet
- Solving Nonlinear Algebraic Systems Using Artificial Neural NetworksDocument13 pagesSolving Nonlinear Algebraic Systems Using Artificial Neural NetworksAthanasios MargarisNo ratings yet
- Physical Meaning of Lagrange Multipliers - Hasan KarabulutDocument15 pagesPhysical Meaning of Lagrange Multipliers - Hasan KarabulutAlexandros TsourosNo ratings yet
- Numerical Integration Methods For Ballistic Rocket Trajectory Simulation ProgramsDocument38 pagesNumerical Integration Methods For Ballistic Rocket Trajectory Simulation Programsgirithik14No ratings yet
- Clavero, J.C. Jorge / Applied Mathematics and Computation 287-288 (2016) 12-27 13Document1 pageClavero, J.C. Jorge / Applied Mathematics and Computation 287-288 (2016) 12-27 13joginder singhNo ratings yet
- Numerical Methods QB 11148S51B 12148S51BDocument10 pagesNumerical Methods QB 11148S51B 12148S51BvenkiatNo ratings yet
- Novo MetodoDocument25 pagesNovo MetodoAtaíde NetoNo ratings yet
- Lyapunov ArticleDocument15 pagesLyapunov ArticleValeria Montserrat Maya GonzalezNo ratings yet
- Adaptation of Homotopy-Perturbation Method For Numeric-Analytic Solution of System of OdesDocument12 pagesAdaptation of Homotopy-Perturbation Method For Numeric-Analytic Solution of System of Odesfalcon_vamNo ratings yet
- American Mathematical SocietyDocument18 pagesAmerican Mathematical Societyjuan carlos molano toroNo ratings yet
- KRTs SVVA RevisionDocument31 pagesKRTs SVVA RevisionCarlos Daniel ArmentaNo ratings yet
- Numerical Solutions of Second-Orderdifferential Equationsby Adam Bashforth MethodDocument5 pagesNumerical Solutions of Second-Orderdifferential Equationsby Adam Bashforth MethodAJER JOURNALNo ratings yet
- SEMA (Formulation and Analysis of Implicit Falkner Methods)Document29 pagesSEMA (Formulation and Analysis of Implicit Falkner Methods)higraNo ratings yet
- Applied Mathematical Modelling: M. Hadizadeh, S. YazdaniDocument9 pagesApplied Mathematical Modelling: M. Hadizadeh, S. YazdaniHo Nhat NamNo ratings yet
- Applications of The Newton Raphson Method in Decision Sciences and EducationDocument29 pagesApplications of The Newton Raphson Method in Decision Sciences and EducationRahul AkaNo ratings yet
- Algorithms For Solving Nonlinear Systems of EquationsDocument28 pagesAlgorithms For Solving Nonlinear Systems of Equationslvjiaze12No ratings yet
- A Modified Newton's Method For Solving Nonlinear Programing ProblemsDocument15 pagesA Modified Newton's Method For Solving Nonlinear Programing Problemsjhon jairo portillaNo ratings yet
- Discrete and Continuous Dynamical Systems Series S: Doi:10.3934/dcdss.2022029Document30 pagesDiscrete and Continuous Dynamical Systems Series S: Doi:10.3934/dcdss.2022029Vadel SniperNo ratings yet
- On Finite Termination of An Iterative Method For Linear Complementarity ProblemsDocument17 pagesOn Finite Termination of An Iterative Method For Linear Complementarity ProblemsJesse LyonsNo ratings yet
- Applicability Conditions of A Non-Linear Superposition TechniqueDocument12 pagesApplicability Conditions of A Non-Linear Superposition TechniqueFranco VillanuevaNo ratings yet
- Kernal Methods Machine LearningDocument53 pagesKernal Methods Machine LearningpalaniNo ratings yet
- A Numerical Algorithm To Find A Root of Non-Linear Equations Using Householder's MethodDocument8 pagesA Numerical Algorithm To Find A Root of Non-Linear Equations Using Householder's MethodInternational Journal of Advances in Applied Sciences (IJAAS)No ratings yet
- 15 2 18 Osinuga PDFDocument8 pages15 2 18 Osinuga PDFImportadora Boliviana de MedicamentosNo ratings yet
- Solving Underdetermined Nonlinear Equations by Newton-Like MethodDocument22 pagesSolving Underdetermined Nonlinear Equations by Newton-Like MethodMr. KNo ratings yet
- 0719 0646 Cubo 22 01 55Document16 pages0719 0646 Cubo 22 01 55talvane.santos069No ratings yet
- WP 95 015Document21 pagesWP 95 015Carlos Eduardo Morales MayhuayNo ratings yet
- Differential Quadrature MethodDocument13 pagesDifferential Quadrature MethodShannon HarrisNo ratings yet
- An Electromagnetism-likeMechanism For Global OptimizationDocument20 pagesAn Electromagnetism-likeMechanism For Global OptimizationArman DaliriNo ratings yet
- FVEG For Hyperbolic SystemsDocument29 pagesFVEG For Hyperbolic SystemsAnand MaltoNo ratings yet
- A High Ord Altern Direct Method.Document25 pagesA High Ord Altern Direct Method.joginder singhNo ratings yet
- Computers, Materials & ContinuaDocument17 pagesComputers, Materials & ContinuaDr. NasreenNo ratings yet
- Time-Fractional Phi-4Document12 pagesTime-Fractional Phi-4Mustafa mızrakNo ratings yet
- 1 Nonlinear RegressionDocument9 pages1 Nonlinear RegressioneerneeszstoNo ratings yet
- Francisco C. Alcaraz Et Al - Three-Dimensional Spin Systems Without Long-Range OrderDocument26 pagesFrancisco C. Alcaraz Et Al - Three-Dimensional Spin Systems Without Long-Range OrderImaxSWNo ratings yet
- 1 s2.0 S0893965900001002 Main PDFDocument7 pages1 s2.0 S0893965900001002 Main PDFRiska Kelana PratiwiNo ratings yet
- Numerical Methods QB 11148S51B 12148S51BDocument10 pagesNumerical Methods QB 11148S51B 12148S51BGeorge OliverNo ratings yet
- Symmetry: Extended Convergence Analysis of The Newton-Hermitian and Skew-Hermitian Splitting MethodDocument15 pagesSymmetry: Extended Convergence Analysis of The Newton-Hermitian and Skew-Hermitian Splitting MethodAlberto Magreñán RuizNo ratings yet
- Mathematics: Purely Iterative Algorithms For Newton's Maps and General ConvergenceDocument27 pagesMathematics: Purely Iterative Algorithms For Newton's Maps and General ConvergenceAlberto Magreñán RuizNo ratings yet
- Education 10 00271Document14 pagesEducation 10 00271Alberto Magreñán RuizNo ratings yet
- Mathematics: Extending The Applicability of Stirling's MethodDocument10 pagesMathematics: Extending The Applicability of Stirling's MethodAlberto Magreñán RuizNo ratings yet
- Mathematics: Advances in The Semilocal Convergence of Newton's Method With Real-World ApplicationsDocument12 pagesMathematics: Advances in The Semilocal Convergence of Newton's Method With Real-World ApplicationsAlberto Magreñán RuizNo ratings yet
- Mathematics: New Improvement of The Domain of Parameters For Newton's MethodDocument12 pagesMathematics: New Improvement of The Domain of Parameters For Newton's MethodAlberto Magreñán RuizNo ratings yet
- Mathematics 09 00144Document8 pagesMathematics 09 00144Alberto Magreñán RuizNo ratings yet
- Mathematics: 3D Visualization Through The Hologram For The Learning of Area and Volume ConceptsDocument20 pagesMathematics: 3D Visualization Through The Hologram For The Learning of Area and Volume ConceptsAlberto Magreñán RuizNo ratings yet
- Mathematics 07 00109 PDFDocument17 pagesMathematics 07 00109 PDFArjun DumaanNo ratings yet
- Mathematics: Study of Local Convergence and Dynamics of A King-Like Two-Step Method With ApplicationsDocument12 pagesMathematics: Study of Local Convergence and Dynamics of A King-Like Two-Step Method With ApplicationsAlberto Magreñán RuizNo ratings yet
- Abstract in EnglishDocument1 pageAbstract in EnglishAlberto Magreñán RuizNo ratings yet
- Tensor Analysis-Chapter 1Document81 pagesTensor Analysis-Chapter 1qftgaugeNo ratings yet
- UEM Sol To Exerc Chap 049 PDFDocument16 pagesUEM Sol To Exerc Chap 049 PDFJianee WanNo ratings yet
- Irreducible and Aperiodic Markov ChainsDocument9 pagesIrreducible and Aperiodic Markov Chainsਹਰਪ੍ਰੀਤ ਸਿੰਘNo ratings yet
- Polynomials ProjectDocument21 pagesPolynomials ProjectDhananjay50% (6)
- Singh, Balwant - Basic Commutative AlgebraDocument396 pagesSingh, Balwant - Basic Commutative AlgebraFelipe Ortiz50% (2)
- Scattering Matrix Characterization of Microwave ComponentsDocument24 pagesScattering Matrix Characterization of Microwave ComponentsClique for Applied Research in Electronic Technology100% (1)
- Additional Derivative Topics: Section 1 The Constant e and Continuous Compound InterestDocument48 pagesAdditional Derivative Topics: Section 1 The Constant e and Continuous Compound InterestArun GhatanNo ratings yet
- GCSE Maths Tutor Number Surds #3 RationalisationDocument2 pagesGCSE Maths Tutor Number Surds #3 Rationalisationgcsemathstutor100% (1)
- Maths IGCSE Summer Transition WorkDocument35 pagesMaths IGCSE Summer Transition WorkHamedNo ratings yet
- Mathematics-Form 3-Chapter 5 Indices by KelvinDocument7 pagesMathematics-Form 3-Chapter 5 Indices by KelvinKelvinNo ratings yet
- Improper Integrals: MATH23 Multivariable CalculusDocument22 pagesImproper Integrals: MATH23 Multivariable CalculusAnonNo ratings yet
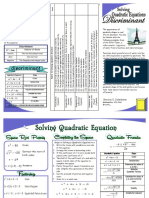
- Quadratic BrochureDocument2 pagesQuadratic BrochureJemarjo Salandanan60% (5)
- Algebraic Topology Solutions 3Document7 pagesAlgebraic Topology Solutions 3Chris WalshNo ratings yet
- Pathfinder Global School, Pataudi: Holiday Homework SESSION - 2022-23 CLASS-10 (A-E) MathsDocument5 pagesPathfinder Global School, Pataudi: Holiday Homework SESSION - 2022-23 CLASS-10 (A-E) Mathsßhupesh YâdávNo ratings yet
- mth101 Term PaperDocument2 pagesmth101 Term PaperShanu WatsaNo ratings yet
- Cartesian Plane Linear FuncDocument3 pagesCartesian Plane Linear Funcsage bristoNo ratings yet
- 7-Lecture 38 State Space RepresentationDocument16 pages7-Lecture 38 State Space RepresentationHamza KhanNo ratings yet
- MExer01 FinalDocument11 pagesMExer01 Finaljohannie ukaNo ratings yet
- CHPT 3 - Development of Truss EquationsDocument69 pagesCHPT 3 - Development of Truss Equationsfatih reyhanNo ratings yet
- Alg 1 CH 0201 Example 23Document8 pagesAlg 1 CH 0201 Example 23Fady HerminaNo ratings yet
- Ch01 Linear FunctionsDocument42 pagesCh01 Linear FunctionsLinoNo ratings yet
- 06 Silver 2 - C2 EdexcelDocument14 pages06 Silver 2 - C2 EdexcelKel1209No ratings yet
- Q9: A Square Lawn Has A 2 M Wide Path Surrounding It. If The Area of The Path Is 136 M The LawnDocument3 pagesQ9: A Square Lawn Has A 2 M Wide Path Surrounding It. If The Area of The Path Is 136 M The LawnsangiNo ratings yet
- Complex Variables by Georg PolyaDocument344 pagesComplex Variables by Georg PolyaGeorge Rodionov100% (1)
- 13A05302 Discrete Mathematics PDFDocument1 page13A05302 Discrete Mathematics PDFManojKarthikNo ratings yet
- Functions and Their Applications: ChapteDocument13 pagesFunctions and Their Applications: ChapteDogiNo ratings yet
- Arabic MathematicsDocument5 pagesArabic MathematicsAbdul AzizNo ratings yet
- Weekly Assignments Semester 1 Math 30-2 2019-2020Document6 pagesWeekly Assignments Semester 1 Math 30-2 2019-2020api-302976262No ratings yet
- DEMO LESSON - Extracting Square Roots 2Document3 pagesDEMO LESSON - Extracting Square Roots 2PRUDENCIO GUZMANI100% (2)
- Mehdi Rahmani-Andebili - Precalculus - Practice Problems, Methods, and Solutions (2021)Document119 pagesMehdi Rahmani-Andebili - Precalculus - Practice Problems, Methods, and Solutions (2021)Rodrigo Osorio Guerra100% (1)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsFrom EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNo ratings yet
- Midjourney Mastery - The Ultimate Handbook of PromptsFrom EverandMidjourney Mastery - The Ultimate Handbook of PromptsRating: 4.5 out of 5 stars4.5/5 (2)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeFrom EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeRating: 4.5 out of 5 stars4.5/5 (69)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)From EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Rating: 4 out of 5 stars4/5 (1)
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- 2084: Artificial Intelligence and the Future of HumanityFrom Everand2084: Artificial Intelligence and the Future of HumanityRating: 4 out of 5 stars4/5 (81)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (15)