You might also like
- 1.fan - A Point Set Generation Network For 3D Object Reconstruction From A Single Image - CVPR - 2017 - PaperDocument9 pages1.fan - A Point Set Generation Network For 3D Object Reconstruction From A Single Image - CVPR - 2017 - PaperxuhangmkNo ratings yet
- The History of Visual Magic in Computers: How Beautiful Images are Made in CAD, 3D, VR and ARFrom EverandThe History of Visual Magic in Computers: How Beautiful Images are Made in CAD, 3D, VR and ARNo ratings yet
- 2404.03656Document11 pages2404.03656mariellarizoser87No ratings yet
- 3d Aware Diffusion - 2303.17905Document20 pages3d Aware Diffusion - 2303.17905Etienne ChiaNo ratings yet
- Symbolic Projection for Image Information Retrieval and Spatial Reasoning: Theory, Applications and Systems for Image Information Retrieval and Spatial ReasoningFrom EverandSymbolic Projection for Image Information Retrieval and Spatial Reasoning: Theory, Applications and Systems for Image Information Retrieval and Spatial ReasoningNo ratings yet
- Occupancy Networks: Learning 3D Reconstruction in Function SpaceDocument11 pagesOccupancy Networks: Learning 3D Reconstruction in Function SpaceIgnacio VizzoNo ratings yet
- Learning To Estimate 3D Human Pose and Shape From A Single Color ImageDocument10 pagesLearning To Estimate 3D Human Pose and Shape From A Single Color ImageSravan ChandraNo ratings yet
- 1612 00603 PDFDocument12 pages1612 00603 PDF王王金强No ratings yet
- Zero-1-To-3: Zero-Shot One Image To 3D ObjectDocument13 pagesZero-1-To-3: Zero-Shot One Image To 3D ObjectJeremy AhnNo ratings yet
- Learning 3D Reconstruction in Function SpaceDocument11 pagesLearning 3D Reconstruction in Function SpaceQinan ZhangNo ratings yet
- 3D-R2N2: A Unified Approach for Single and Multi-view 3D Object Reconstruction Using Recurrent Neural NetworksDocument17 pages3D-R2N2: A Unified Approach for Single and Multi-view 3D Object Reconstruction Using Recurrent Neural Networks王王金强No ratings yet
- Realpoint3D: Point Cloud Generation From A Single Image With Complex BackgroundDocument8 pagesRealpoint3D: Point Cloud Generation From A Single Image With Complex Backgroundorhema olugaNo ratings yet
- Image-Based 3D Object Reconstruction - State of The Art and Trends in The Deep Learning EraDocument27 pagesImage-Based 3D Object Reconstruction - State of The Art and Trends in The Deep Learning EraPeker ChouNo ratings yet
- 3D Model Generation and Reconstruction Using Conditional Generative Adversarial NetworkDocument9 pages3D Model Generation and Reconstruction Using Conditional Generative Adversarial NetworkPicolas CageNo ratings yet
- Anything-3D: Towards Single-View Anything Reconstruction in The WildDocument7 pagesAnything-3D: Towards Single-View Anything Reconstruction in The WildSigveNo ratings yet
- 3D NvidiaDocument20 pages3D NvidiaKushal NNo ratings yet
- Yin Learning To Recover 3D Scene Shape From A Single Image CVPR 2021 PaperDocument10 pagesYin Learning To Recover 3D Scene Shape From A Single Image CVPR 2021 PaperDidar İlayda ÇİÇEKNo ratings yet
- Keypointnerf: Generalizing Image-Based Volumetric Avatars Using Relative Spatial Encoding of KeypointsDocument24 pagesKeypointnerf: Generalizing Image-Based Volumetric Avatars Using Relative Spatial Encoding of KeypointsPiyush DeoleNo ratings yet
- Capnet: Continuous Approximation Projection For 3D Point Cloud Reconstruction Using 2D SupervisionDocument8 pagesCapnet: Continuous Approximation Projection For 3D Point Cloud Reconstruction Using 2D SupervisionArmandoNo ratings yet
- Learning Adversarial 3D Model Generation With 2D Image EnhancerDocument8 pagesLearning Adversarial 3D Model Generation With 2D Image EnhancerLadyBruneNo ratings yet
- 3D Scan Completion Using Example ModelsDocument10 pages3D Scan Completion Using Example ModelsQuốc Kiệt TrầnNo ratings yet
- RayNet: Learning 3D Reconstruction with CNN and Ray PotentialsDocument10 pagesRayNet: Learning 3D Reconstruction with CNN and Ray PotentialsIgnacio VizzoNo ratings yet
- IDE-3D: Interactive Disentangled Editing for High-Resolution 3D PortraitsDocument14 pagesIDE-3D: Interactive Disentangled Editing for High-Resolution 3D PortraitsSoledadGarcíaNo ratings yet
- Effective Loss ReconsDocument21 pagesEffective Loss ReconsCaithyralNo ratings yet
- LGM: Large Multi-View Gaussian Model For High-Resolution 3D Content CreationDocument20 pagesLGM: Large Multi-View Gaussian Model For High-Resolution 3D Content CreationNam NguyenNo ratings yet
- Deep Learning Drives 3D Object ReconstructionDocument27 pagesDeep Learning Drives 3D Object ReconstructionMichael AmundsonNo ratings yet
- pdf1906 06543 PDFDocument27 pagespdf1906 06543 PDFAkihito SudoNo ratings yet
- Learning Efficient Point Cloud Generation For Dense 3D Object ReconstructionDocument8 pagesLearning Efficient Point Cloud Generation For Dense 3D Object ReconstructionArmandoNo ratings yet
- 1-Fast and Robust Multi-Person 3D Pose Estimation From Multiple Views-IEEE-2019Document10 pages1-Fast and Robust Multi-Person 3D Pose Estimation From Multiple Views-IEEE-2019Ravi Shankar SharmaNo ratings yet
- IJCI - Volume 8 - Issue 2 - Pages 109-114Document6 pagesIJCI - Volume 8 - Issue 2 - Pages 109-114John RootNo ratings yet
- Volume GANDocument12 pagesVolume GANFei YinNo ratings yet
- 3D Reconstruction 2021Document27 pages3D Reconstruction 2021Harre Bams Ayma ArandaNo ratings yet
- A View-Free Image Stitching Network Based On Global HomographyDocument9 pagesA View-Free Image Stitching Network Based On Global HomographyklammNo ratings yet
- LRM: L R M S I 3D: Arge Econstruction Odel For Ingle Mage ToDocument23 pagesLRM: L R M S I 3D: Arge Econstruction Odel For Ingle Mage Tocaxidas953No ratings yet
- Neural Body Fitting: Unifying Deep Learning and Model-Based Human Pose and Shape EstimationDocument13 pagesNeural Body Fitting: Unifying Deep Learning and Model-Based Human Pose and Shape EstimationSravan ChandraNo ratings yet
- SAIL-VOS 3D: A Synthetic Dataset and Baselines For Object Detection and 3DDocument13 pagesSAIL-VOS 3D: A Synthetic Dataset and Baselines For Object Detection and 3DSimon linNo ratings yet
- Simmim: A Simple Framework For Masked Image ModelingDocument11 pagesSimmim: A Simple Framework For Masked Image ModelingqwertyNo ratings yet
- Amodal 3D Reconstruction For Robotic Manipulation Via Stability and ConnectivityDocument15 pagesAmodal 3D Reconstruction For Robotic Manipulation Via Stability and Connectivitykallenhard1No ratings yet
- Mask3D Pre-Training 2D Vision Transformers by Learning Masked 3D PriorsDocument12 pagesMask3D Pre-Training 2D Vision Transformers by Learning Masked 3D PriorsZhi HouNo ratings yet
- Wu Unsupervised Joint 3D Object Model Learning and 6D Pose Estimation ICCVW 2019 PaperDocument10 pagesWu Unsupervised Joint 3D Object Model Learning and 6D Pose Estimation ICCVW 2019 PaperIbon MerinoNo ratings yet
- Pattern RecognitionDocument12 pagesPattern RecognitionReem ShakirNo ratings yet
- Inverse Graphic GANDocument11 pagesInverse Graphic GANJose TiradoNo ratings yet
- Pix2Pose: Pixel-Wise Coordinate Regression of Objects For 6D Pose EstimationDocument17 pagesPix2Pose: Pixel-Wise Coordinate Regression of Objects For 6D Pose Estimation1903237473No ratings yet
- FML: Face Model Learning from Videos OptimizedDocument11 pagesFML: Face Model Learning from Videos OptimizedVương Hoàng Phạm NguyễnNo ratings yet
- Deng Deformed Implicit Field Modeling 3D Shapes With Learned Dense Correspondence CVPR 2021 PaperDocument11 pagesDeng Deformed Implicit Field Modeling 3D Shapes With Learned Dense Correspondence CVPR 2021 PaperVivian LiNo ratings yet
- 1 s2.0 S0031320322007518 MainDocument12 pages1 s2.0 S0031320322007518 Mainnofearknight625No ratings yet
- Stable DiffusionDocument23 pagesStable Diffusionyz-zhao20No ratings yet
- High-Resolution Image Synthesis With Latent Diffusion ModelsDocument45 pagesHigh-Resolution Image Synthesis With Latent Diffusion ModelsMike KawasakiNo ratings yet
- Neural Parts: Learning Expressive 3D Shape Abstractions With Invertible Neural NetworksDocument33 pagesNeural Parts: Learning Expressive 3D Shape Abstractions With Invertible Neural NetworksThuy Tran Dinh VinhNo ratings yet
- Unsupervised Learning of Probably Symmetric Deformable 3D Objects From Images in The Wild (Invited Paper)Document14 pagesUnsupervised Learning of Probably Symmetric Deformable 3D Objects From Images in The Wild (Invited Paper)Diego LabastidaNo ratings yet
- 1.3d Shape Reconstruction From 2d Images With Disentangled Attrubute FlowDocument11 pages1.3d Shape Reconstruction From 2d Images With Disentangled Attrubute FlowxuhangmkNo ratings yet
- Unsupervised Learning of Depth and Ego-Motion from VideoDocument10 pagesUnsupervised Learning of Depth and Ego-Motion from VideoSagar URNo ratings yet
- 3D Reconstruction From A Single Still Image Based PDFDocument7 pages3D Reconstruction From A Single Still Image Based PDFanass anasNo ratings yet
- Stylesdf: High-Resolution 3D-Consistent Image and Geometry GenerationDocument17 pagesStylesdf: High-Resolution 3D-Consistent Image and Geometry GenerationAkhilesh YadavNo ratings yet
- Grad-CAM: Visual Explanations From Deep Networks Via Gradient-Based LocalizationDocument24 pagesGrad-CAM: Visual Explanations From Deep Networks Via Gradient-Based LocalizationgousesyedNo ratings yet
- Yeh Semantic Image Inpainting CVPR 2017 PaperDocument9 pagesYeh Semantic Image Inpainting CVPR 2017 PaperRafi Y.SNo ratings yet
- 3d-Aware Conditional Image Synthesis: Kangle Deng Gengshan Yang Deva Ramanan Jun-Yan Zhu Carnegie Mellon UniversityDocument15 pages3d-Aware Conditional Image Synthesis: Kangle Deng Gengshan Yang Deva Ramanan Jun-Yan Zhu Carnegie Mellon Universitypyash2113No ratings yet
- Learning To Predict 3D Objects With An Interpolation-Based Differentiable RendererDocument11 pagesLearning To Predict 3D Objects With An Interpolation-Based Differentiable RendererDebjit ChowdhuryNo ratings yet
- Pixel2Mesh++: Multi-View 3D Mesh Generation Via DeformationDocument17 pagesPixel2Mesh++: Multi-View 3D Mesh Generation Via DeformationIgnacio VizzoNo ratings yet
- Learning Non-Volumetric Depth Fusion Using Successive ReprojectionsDocument10 pagesLearning Non-Volumetric Depth Fusion Using Successive ReprojectionsIgnacio VizzoNo ratings yet
- 1906 02739v2Document15 pages1906 02739v2asklsalksaNo ratings yet
- 1901 05103 PDFDocument19 pages1901 05103 PDFIgnacio VizzoNo ratings yet
- RayNet: Learning 3D Reconstruction with CNN and Ray PotentialsDocument10 pagesRayNet: Learning 3D Reconstruction with CNN and Ray PotentialsIgnacio VizzoNo ratings yet
- 1906 02739v2Document15 pages1906 02739v2asklsalksaNo ratings yet
- 1901 05103 PDFDocument19 pages1901 05103 PDFIgnacio VizzoNo ratings yet
- 3DMV: Joint 3D-Multi-View Prediction For 3D Semantic Scene SegmentationDocument20 pages3DMV: Joint 3D-Multi-View Prediction For 3D Semantic Scene SegmentationIgnacio VizzoNo ratings yet
- Atlasnet: A Papier-M Ach E Approach To Learning 3D Surface GenerationDocument16 pagesAtlasnet: A Papier-M Ach E Approach To Learning 3D Surface GenerationIgnacio VizzoNo ratings yet
- Overlapnet: Loop Closing For Lidar-Based SlamDocument10 pagesOverlapnet: Loop Closing For Lidar-Based SlamIgnacio VizzoNo ratings yet
- RayNet: Learning 3D Reconstruction with CNN and Ray PotentialsDocument10 pagesRayNet: Learning 3D Reconstruction with CNN and Ray PotentialsIgnacio VizzoNo ratings yet
- Octnetfusion: Learning Depth Fusion From Data: (Riegler, Bischof) @icg - Tugraz.At (Osman - Ulusoy, Andreas - Geiger) @tue - Mpg.DeDocument10 pagesOctnetfusion: Learning Depth Fusion From Data: (Riegler, Bischof) @icg - Tugraz.At (Osman - Ulusoy, Andreas - Geiger) @tue - Mpg.DeIgnacio VizzoNo ratings yet
- Surfacenet: An End-To-End 3D Neural Network For Multiview StereopsisDocument9 pagesSurfacenet: An End-To-End 3D Neural Network For Multiview StereopsisIgnacio VizzoNo ratings yet
- Scancomplete: Large-Scale Scene Completion and Semantic Segmentation For 3D ScansDocument15 pagesScancomplete: Large-Scale Scene Completion and Semantic Segmentation For 3D ScansIgnacio VizzoNo ratings yet
- Learning an Overlap-based Observation Model for 3D LiDAR LocalizationDocument7 pagesLearning an Overlap-based Observation Model for 3D LiDAR LocalizationIgnacio VizzoNo ratings yet
- Domain Transfer For Semantic Segmentation of Lidar Data Using Deep Neural NetworksDocument8 pagesDomain Transfer For Semantic Segmentation of Lidar Data Using Deep Neural NetworksIgnacio VizzoNo ratings yet
- Suma++: Efficient Lidar-Based Semantic SlamDocument8 pagesSuma++: Efficient Lidar-Based Semantic SlamIgnacio VizzoNo ratings yet
- Overlapnet: Loop Closing For Lidar-Based SlamDocument10 pagesOverlapnet: Loop Closing For Lidar-Based SlamIgnacio VizzoNo ratings yet
- Semantickitti: A Dataset For Semantic Scene Understanding of Lidar SequencesDocument11 pagesSemantickitti: A Dataset For Semantic Scene Understanding of Lidar SequencesIgnacio VizzoNo ratings yet
- Learning an Overlap-based Observation Model for 3D LiDAR LocalizationDocument7 pagesLearning an Overlap-based Observation Model for 3D LiDAR LocalizationIgnacio VizzoNo ratings yet
- Domain Transfer For Semantic Segmentation of Lidar Data Using Deep Neural NetworksDocument8 pagesDomain Transfer For Semantic Segmentation of Lidar Data Using Deep Neural NetworksIgnacio VizzoNo ratings yet
- Semantickitti: A Dataset For Semantic Scene Understanding of Lidar SequencesDocument11 pagesSemantickitti: A Dataset For Semantic Scene Understanding of Lidar SequencesIgnacio VizzoNo ratings yet
- Suma++: Efficient Lidar-Based Semantic SlamDocument8 pagesSuma++: Efficient Lidar-Based Semantic SlamIgnacio VizzoNo ratings yet
- Factor Graphs For Robot PerceptionDocument144 pagesFactor Graphs For Robot PerceptionIgnacio Vizzo100% (1)
- (Analog) - MS2318 - Design Fundamentals of Implementing An Isolated Half-Bridge Gate DriverDocument4 pages(Analog) - MS2318 - Design Fundamentals of Implementing An Isolated Half-Bridge Gate DriverIgnacio VizzoNo ratings yet
- Assignment 5: Engineering Utilities IiDocument4 pagesAssignment 5: Engineering Utilities IiRex SabersonNo ratings yet
- Ada4891 1 - 4891 2 - 4891 3 - 4891 4Document24 pagesAda4891 1 - 4891 2 - 4891 3 - 4891 4dsotmNo ratings yet
- Apollo System Engineering Manual. Environmental Control SystemDocument137 pagesApollo System Engineering Manual. Environmental Control Systemjackie_fisher_email8329100% (2)
- Performance Analysis of Wallace Tree Multiplier With Kogge Stone Adder Using 15-4 CompressorDocument5 pagesPerformance Analysis of Wallace Tree Multiplier With Kogge Stone Adder Using 15-4 Compressoranil kumarNo ratings yet
- 2018 General Education Reviewer Part 10 - 50 Questions With Answers - LET EXAM - Questions & AnswersDocument10 pages2018 General Education Reviewer Part 10 - 50 Questions With Answers - LET EXAM - Questions & AnswersScribdNo ratings yet
- Scope of Work - Upgrade Power Grid - Isa Air Base PDFDocument32 pagesScope of Work - Upgrade Power Grid - Isa Air Base PDFHussain AljafariNo ratings yet
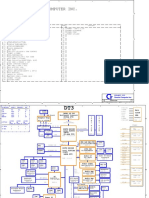
- Acer Aspire 1710 (Quanta DT3) PDFDocument35 pagesAcer Aspire 1710 (Quanta DT3) PDFMustafa AkanNo ratings yet
- Britain, Germany and Colonial Violence in South-West Africa, 1884-1919Document238 pagesBritain, Germany and Colonial Violence in South-West Africa, 1884-1919Саша ШестаковаNo ratings yet
- 2GIG ZWave CT30e Thermostat Installation GuideDocument19 pages2GIG ZWave CT30e Thermostat Installation Guideyamimaker2002No ratings yet
- Defibrelator ch1Document31 pagesDefibrelator ch1د.محمد عبد المنعم الشحاتNo ratings yet
- Overhead Management through Template ConfigurationDocument5 pagesOverhead Management through Template ConfigurationBalanathan VirupasanNo ratings yet
- Smart CityDocument4 pagesSmart CityRendi NafiahNo ratings yet
- OSHCo Study I MalaysiaDocument7 pagesOSHCo Study I MalaysiafairusNo ratings yet
- Module 14 - Final FilesDocument1,042 pagesModule 14 - Final FilesMinami KotoriNo ratings yet
- Did You Ever Meet Shattered Illusions?Document5 pagesDid You Ever Meet Shattered Illusions?Junjie HuangNo ratings yet
- CLASS 10 CH-1 ECO DEVELOPMENT Question AnswersDocument8 pagesCLASS 10 CH-1 ECO DEVELOPMENT Question AnswersDoonites DelhiNo ratings yet
- Crane Company Within SingaporeDocument4 pagesCrane Company Within SingaporeRash AcidNo ratings yet
- User Manual: FunctionalityDocument4 pagesUser Manual: FunctionalityjicutuNo ratings yet
- Cost-Time-Resource Sheet for Rumaila Oil Field Engineering ServicesDocument13 pagesCost-Time-Resource Sheet for Rumaila Oil Field Engineering ServicesonlyikramNo ratings yet
- NI 43 101 Don Mario September 2013Document69 pagesNI 43 101 Don Mario September 2013Thalia QuispeNo ratings yet
- The Future of Luxury Fashion ReportDocument70 pagesThe Future of Luxury Fashion Reportsalma andjaniNo ratings yet
- MyITLab Access Grader Real Estate Case SolutionDocument3 pagesMyITLab Access Grader Real Estate Case SolutionShivaani Aggarwal0% (1)
- Buck 1948Document9 pagesBuck 1948Carlos Mora100% (1)
- Domestic Water-Supply - TheoryDocument19 pagesDomestic Water-Supply - Theoryyarzar17No ratings yet
- Srikanth Aadhar Iti CollegeDocument1 pageSrikanth Aadhar Iti CollegeSlns AcptNo ratings yet
- Nozomi Networks Smart Polling Data SheetDocument4 pagesNozomi Networks Smart Polling Data SheetFlávio Camilo CruzNo ratings yet
- Operation and Safety Manual: Ansi As/NzsDocument116 pagesOperation and Safety Manual: Ansi As/NzsMuhammad AwaisNo ratings yet
- Harmonic Excitation and Response Spectrum AnalysisDocument54 pagesHarmonic Excitation and Response Spectrum AnalysisAayisha S AHAMED100% (1)
- Curso AutoturnDocument66 pagesCurso AutoturnMiorga88No ratings yet
- MOB200 - Going Digital: SAP Mobile Technology Strategy and RoadmapDocument41 pagesMOB200 - Going Digital: SAP Mobile Technology Strategy and RoadmapRaviNo ratings yet
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- SketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyFrom EverandSketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyRating: 1.5 out of 5 stars1.5/5 (2)
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsFrom EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsRating: 5 out of 5 stars5/5 (1)
- Beginning AutoCAD® 2020 Exercise WorkbookFrom EverandBeginning AutoCAD® 2020 Exercise WorkbookRating: 2.5 out of 5 stars2.5/5 (3)
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Autodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersFrom EverandAutodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersNo ratings yet
- Contactless Vital Signs MonitoringFrom EverandContactless Vital Signs MonitoringWenjin WangNo ratings yet
- Autodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersFrom EverandAutodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersNo ratings yet
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsFrom EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNo ratings yet
- Design Research Through Practice: From the Lab, Field, and ShowroomFrom EverandDesign Research Through Practice: From the Lab, Field, and ShowroomRating: 3 out of 5 stars3/5 (7)