You might also like
- Lenovo B460 Wistron LB46EDocument53 pagesLenovo B460 Wistron LB46Eحسن علي نوفلNo ratings yet
- Lenovo B460E LB46E MB 10307-1Document53 pagesLenovo B460E LB46E MB 10307-1NICSTRONNo ratings yet
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- HP DV1000 (Wistron Leopard3) PDFDocument41 pagesHP DV1000 (Wistron Leopard3) PDFASDFG21No ratings yet
- MC33390Document16 pagesMC33390bettinemed2023No ratings yet
- 5388a Fujitsu Siemens Amilo Li1718 Wistron Y4A Rev-3 PDFDocument49 pages5388a Fujitsu Siemens Amilo Li1718 Wistron Y4A Rev-3 PDFPencytte BoeyyNo ratings yet
- LB46E Block DiagramDocument53 pagesLB46E Block DiagramEdna MariaNo ratings yet
- A8s MB Rev-2-0Document94 pagesA8s MB Rev-2-0QuenitoLucianoJoãoNo ratings yet
- Scan0214 PDFDocument1 pageScan0214 PDFJayson Jonson AraojoNo ratings yet
- Compal La-1011 r1.0 SchematicsDocument47 pagesCompal La-1011 r1.0 SchematicsNoureddine KtataNo ratings yet
- CAP-1901-EM-01 - LV Switchgear-1Document1 pageCAP-1901-EM-01 - LV Switchgear-1Nindy FebrianiNo ratings yet
- Anote2.0 Block Diagram: UMA Solution DISCRETE SolutionDocument58 pagesAnote2.0 Block Diagram: UMA Solution DISCRETE SolutionIIIkwarkaNo ratings yet
- Emx5000-12/20 Circuit Diagram 7/9 (DSP-SPX)Document3 pagesEmx5000-12/20 Circuit Diagram 7/9 (DSP-SPX)Jeff BrintonNo ratings yet
- 74 Act 16646Document15 pages74 Act 16646daniedwawNo ratings yet
- Asus A6r Rev 2.0 SCHDocument50 pagesAsus A6r Rev 2.0 SCHsglyanoyNo ratings yet
- Asus A8LeDocument94 pagesAsus A8LeAndriyNo ratings yet
- WWW - Vinafix.vn: Mobile CPUDocument42 pagesWWW - Vinafix.vn: Mobile CPUAphe TaiasuNo ratings yet
- Mobile CPU: Project Code: 91.4T901.001 PCB P/N: 48.4T901.0SA Revision: 06252-SaDocument44 pagesMobile CPU: Project Code: 91.4T901.001 PCB P/N: 48.4T901.0SA Revision: 06252-SaAmila LasanthaNo ratings yet
- BlockDocument4 pagesBlockRonaldo FilhoNo ratings yet
- D D D D D D D D: SN54ABT16646, SN74ABT16646 16-Bit Bus Transceivers and Registers With 3-State OutputsDocument19 pagesD D D D D D D D: SN54ABT16646, SN74ABT16646 16-Bit Bus Transceivers and Registers With 3-State OutputsKhan KakaNo ratings yet
- Asus A6f r1.1 SchematicsDocument64 pagesAsus A6f r1.1 SchematicsАлексей ГомоновNo ratings yet
- Acer Aspire 5235 5535 5735 (Wistron Cathedral Peak II) PDFDocument43 pagesAcer Aspire 5235 5535 5735 (Wistron Cathedral Peak II) PDFMustafa AkanNo ratings yet
- Enphase Field Wiring Diagram M215 208vDocument1 pageEnphase Field Wiring Diagram M215 208vGareth PriceNo ratings yet
- Cover: Block Power Tree Schematics IndexDocument8 pagesCover: Block Power Tree Schematics IndexgonzaloNo ratings yet
- LA1 4 Bloc K Dia Gra M: Mobile CPUDocument53 pagesLA1 4 Bloc K Dia Gra M: Mobile CPUVugar MirzaliyevNo ratings yet
- Scheme Asus z99d PDFDocument94 pagesScheme Asus z99d PDFЮра ИвановNo ratings yet
- Description/ordering Information: SN54AHC245, SN74AHC245 Octal Bus Transceivers With 3-State OutputsDocument16 pagesDescription/ordering Information: SN54AHC245, SN74AHC245 Octal Bus Transceivers With 3-State OutputsMERMER LANDNo ratings yet
- REVISED GA CIRCUIT DWG-ModelDocument1 pageREVISED GA CIRCUIT DWG-Modeldebasish bhowmickNo ratings yet
- Dell Inspiron b120 b130 1300 Wistron Key West Dk1 Rev SdsecDocument37 pagesDell Inspiron b120 b130 1300 Wistron Key West Dk1 Rev Sdsecedward blancoNo ratings yet
- SN 74 Abt 16623Document12 pagesSN 74 Abt 16623daniedwawNo ratings yet
- Schematic Sony mbx250 Vpceg36egunlockedDocument73 pagesSchematic Sony mbx250 Vpceg36egunlockedPaulo SilvaNo ratings yet
- Acer Extensa 5620z - Wistron Columbia - TangizDocument45 pagesAcer Extensa 5620z - Wistron Columbia - TangizDeddy Suyanto100% (1)
- Acer Emachines D525 - D725 Wistron HM40-MV RevSB SchematicDocument51 pagesAcer Emachines D525 - D725 Wistron HM40-MV RevSB SchematicKholit LitNo ratings yet
- Microstepping Dmos Driver With Translator: A3977xEDDocument19 pagesMicrostepping Dmos Driver With Translator: A3977xEDRos WroswNo ratings yet
- C6200 Generator Controller: Application SynchronizingDocument4 pagesC6200 Generator Controller: Application SynchronizingkylegazeNo ratings yet
- Dell Latitude 2100 (Quanta ZM1)Document46 pagesDell Latitude 2100 (Quanta ZM1)SANJANNo ratings yet
- 15panels ACM 3Ph PDFDocument1 page15panels ACM 3Ph PDFAnthony Robert XNo ratings yet
- Acer Travelmate 5310 5710 5710g Extensa 5210 5610 Wistron Dellen Rev Sa SCHDocument43 pagesAcer Travelmate 5310 5710 5710g Extensa 5210 5610 Wistron Dellen Rev Sa SCHЕвгений АвазачемNo ratings yet
- Acer - Travelmate 2423 (Ag1-910) PDFDocument40 pagesAcer - Travelmate 2423 (Ag1-910) PDFLos QuilmesNo ratings yet
- Acer Aspire 5930 - 5930G - 5930Z Wistron Eiger Rev1.0 SchematicDocument50 pagesAcer Aspire 5930 - 5930G - 5930Z Wistron Eiger Rev1.0 Schematicpremium.technNo ratings yet
- Features Description: BCD To Seven Segment Decoder/DriverDocument3 pagesFeatures Description: BCD To Seven Segment Decoder/Driverkkundanam9979No ratings yet
- County of Los Angeles PV Electrical WorksheetDocument2 pagesCounty of Los Angeles PV Electrical Worksheetearl baldomaroNo ratings yet
- ADP3188 AD Analog DevicesDocument28 pagesADP3188 AD Analog DevicesMohammad UsmanNo ratings yet
- EN FANOXPC DATA MPC MotorProtection C GC17 R03 PDFDocument1 pageEN FANOXPC DATA MPC MotorProtection C GC17 R03 PDFarolnNo ratings yet
- Socket 479 Sys Power Dothan 478 uFCPGA: Host BusDocument44 pagesSocket 479 Sys Power Dothan 478 uFCPGA: Host BusreynielNo ratings yet
- V.D Calculations - 01Document4 pagesV.D Calculations - 01Ahmed MagdyNo ratings yet
- (Cat 1492-TIFM40F-24-2) : Warning Avertissement Warnung Avvertenza AdvertenciaDocument4 pages(Cat 1492-TIFM40F-24-2) : Warning Avertissement Warnung Avvertenza Advertenciateddy fuentesNo ratings yet
- AD775 AnalogDevicesDocument12 pagesAD775 AnalogDeviceshector mirandaNo ratings yet
- Wistron Je70-Cp (91.4HN01.001, 48.4HN01.0SD, 09923-1M, 2010-02-02)Document67 pagesWistron Je70-Cp (91.4HN01.001, 48.4HN01.0SD, 09923-1M, 2010-02-02)ruslancikdurbalaNo ratings yet
- Tecnica Plasma 18-31 PDFDocument20 pagesTecnica Plasma 18-31 PDFсергей васяновичNo ratings yet
- Lan System: SectionDocument43 pagesLan System: SectionEduardo ColinNo ratings yet
- 3A, 28V, 925Khz Step-Down Converter: The Future of Analog Ic TechnologyDocument13 pages3A, 28V, 925Khz Step-Down Converter: The Future of Analog Ic TechnologyGabriel GodoyNo ratings yet
- SN54ACT16244, 74ACT16244 Datasheet (Rev. B)Document18 pagesSN54ACT16244, 74ACT16244 Datasheet (Rev. B)Ecus ElectronicsNo ratings yet
- 6-Bit Programmable 2-, 3-, 4-Phase Synchronous Buck ControllerDocument20 pages6-Bit Programmable 2-, 3-, 4-Phase Synchronous Buck ControlleryanjunNo ratings yet
- SN75ALS172ADocument14 pagesSN75ALS172AJuan HernándezNo ratings yet
- Acer Aspire 5735 Intel Wistron Cathedral Peak II PDFDocument44 pagesAcer Aspire 5735 Intel Wistron Cathedral Peak II PDFthorito23No ratings yet
- NCP302045Document17 pagesNCP302045Igor Rocha PauloNo ratings yet
- Form 207054 REV D CDS Medonic M Series MaintenanceDocument2 pagesForm 207054 REV D CDS Medonic M Series MaintenanceHAITHAMNo ratings yet
- Computed Radiography SystemDocument4 pagesComputed Radiography SystemHAITHAMNo ratings yet
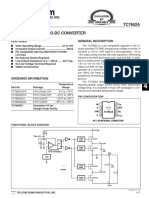
- TC7662A Charge Pump Dc-To-Dc Converter: General Description FeaturesDocument5 pagesTC7662A Charge Pump Dc-To-Dc Converter: General Description FeaturesHAITHAMNo ratings yet
- Basic Service Notes - SECOP (Formerly DANFOSS) DC CompressorsDocument3 pagesBasic Service Notes - SECOP (Formerly DANFOSS) DC CompressorsHAITHAMNo ratings yet
- R50Document1 pageR50HAITHAMNo ratings yet
- Medlink Mi X Ray System Brochure REV V2Document2 pagesMedlink Mi X Ray System Brochure REV V2HAITHAMNo ratings yet
- JPI DynaVue BrochureDocument4 pagesJPI DynaVue BrochureHAITHAMNo ratings yet
- Pant Os DGXPEngDocument5 pagesPant Os DGXPEngHAITHAMNo ratings yet
- URIT 12 Hemoglobin Meter Operation Manual 1Document31 pagesURIT 12 Hemoglobin Meter Operation Manual 1HAITHAM100% (1)
- 777, D 300094 XPDFCFCDDocument1 page777, D 300094 XPDFCFCDHAITHAMNo ratings yet
- Jameco Part Number 901191: Distributed byDocument16 pagesJameco Part Number 901191: Distributed byHAITHAMNo ratings yet
- URIT 12 Hemoglobin Meter Operation Manual 1Document31 pagesURIT 12 Hemoglobin Meter Operation Manual 1HAITHAM100% (1)
- Biosensor PDFDocument3 pagesBiosensor PDFHAITHAMNo ratings yet
- IA FormatDocument2 pagesIA Formatpatilvk2003No ratings yet
- Savina Electrical Safety Test in The USA and Canada: 1 Visual Inspection of Basic UnitDocument4 pagesSavina Electrical Safety Test in The USA and Canada: 1 Visual Inspection of Basic UnitThiago Zuconi VianaNo ratings yet
- HCI434E/444E - Winding 25: Technical Data SheetDocument8 pagesHCI434E/444E - Winding 25: Technical Data SheetRenzo zuñiga ahonNo ratings yet
- Advantages and Disadvantages of Stepper MotorsDocument1 pageAdvantages and Disadvantages of Stepper MotorsSyuhadah RashidNo ratings yet
- Brian May Fryer AC30 Fryer GuitarsDocument46 pagesBrian May Fryer AC30 Fryer GuitarsFlorian PöschkoNo ratings yet
- Quotation-11KV Indoor VCB Panel-Schneider MakeDocument3 pagesQuotation-11KV Indoor VCB Panel-Schneider MakeSharafat Ali100% (1)
- AE10 SolDocument223 pagesAE10 SolDrGopikrishna PasamNo ratings yet
- Positive, Zero, Negative Sequence of AlternatorDocument3 pagesPositive, Zero, Negative Sequence of AlternatorJeya KannanNo ratings yet
- Cat - N BOOK 2019-20Document66 pagesCat - N BOOK 2019-20achyut kumarNo ratings yet
- Fowler Instrumts N Msrmts 23sDocument23 pagesFowler Instrumts N Msrmts 23syashittitaNo ratings yet
- Atex Lighting DatasheetsDocument62 pagesAtex Lighting DatasheetsAbhilashNo ratings yet
- Green University of Bangladesh: Faculty of Science and EngineeringDocument4 pagesGreen University of Bangladesh: Faculty of Science and EngineeringHaytham KenwayNo ratings yet
- Ee Induction Motors HandoutsDocument2 pagesEe Induction Motors HandoutsJevan SoberanoNo ratings yet
- Motor Test FormDocument1 pageMotor Test FormArie Yantoe100% (1)
- Pioneer Deh-P680mp p6800mp p6850mp 924Document80 pagesPioneer Deh-P680mp p6800mp p6850mp 924Luis Arturo Leiva MonjarasNo ratings yet
- BTU &BTA Reference LayoutDocument8 pagesBTU &BTA Reference LayoutMilbert CandelarioNo ratings yet
- 80 Anpec Apl3510Document20 pages80 Anpec Apl3510Radu PetricaNo ratings yet
- Plano Grupo ElectrogenoDocument2 pagesPlano Grupo Electrogenoluis alberto rodriguezNo ratings yet
- TeSys K - LP5K0910BW3Document4 pagesTeSys K - LP5K0910BW3saqib ghouriNo ratings yet
- Final Iqbal Report On Gss 220kvDocument50 pagesFinal Iqbal Report On Gss 220kvIqbal DeenNo ratings yet
- 2089 340065 Multimeter Mastech Ms8240cDocument11 pages2089 340065 Multimeter Mastech Ms8240cFrancisco Javier GuerraNo ratings yet
- Honda ST 1100 Pan European Fuel Pump Test InstructionsDocument2 pagesHonda ST 1100 Pan European Fuel Pump Test InstructionsExclusivo1No ratings yet
- Reactive Power of Star and Delta Connected Balanced LoadsDocument3 pagesReactive Power of Star and Delta Connected Balanced Loadssrikaanth06No ratings yet
- ET-335 Transmission, Distribution and Protection of Electrical Power SystemsDocument11 pagesET-335 Transmission, Distribution and Protection of Electrical Power SystemsRukan Abdullah Shah100% (1)
- T Productos thql32020 Ge De4a86Document2 pagesT Productos thql32020 Ge De4a86Brayan Enrique Senk TiznadoNo ratings yet
- Design and Analysis of A Brushless Doubly Fed Induction Machine With Rotary TransformerDocument6 pagesDesign and Analysis of A Brushless Doubly Fed Induction Machine With Rotary TransformerHuong ThaoNo ratings yet
- General Wiring Cables BSS-2004.: Single Conductor Cables/CoilDocument1 pageGeneral Wiring Cables BSS-2004.: Single Conductor Cables/Coilabdul hafeezNo ratings yet
- 1N5059 - 1N5062 PDFDocument5 pages1N5059 - 1N5062 PDFDimitris DimitriadisNo ratings yet
- Eh9115three PDFDocument1 pageEh9115three PDFLwin PhyoNo ratings yet
- حساب تيار القصر-شنايدرDocument7 pagesحساب تيار القصر-شنايدرAmroNo ratings yet