You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- BIOL 2300 Homework 2 Summer2019Document2 pagesBIOL 2300 Homework 2 Summer2019Tanner JohnsonNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Super Flow 110120260 FLOWBENCHDocument206 pagesSuper Flow 110120260 FLOWBENCHAnderson ZambrzyckiNo ratings yet
- Dyno 2000 User Guide PDFDocument114 pagesDyno 2000 User Guide PDFAnderson ZambrzyckiNo ratings yet
- The Four Types of Gaps and How To Play Them PDFDocument17 pagesThe Four Types of Gaps and How To Play Them PDFshaikiftakar100% (2)
- NASCAR Late ModelDocument14 pagesNASCAR Late ModelAnderson ZambrzyckiNo ratings yet
- Simpack Off-Line and Real Time SimulationDocument23 pagesSimpack Off-Line and Real Time SimulationAnderson ZambrzyckiNo ratings yet
- Le Mans PocketguideDocument52 pagesLe Mans PocketguideAnderson ZambrzyckiNo ratings yet
- Race Car Crew ChiefDocument33 pagesRace Car Crew ChiefAnderson ZambrzyckiNo ratings yet
- Trionic 5 PDFDocument192 pagesTrionic 5 PDFAnderson ZambrzyckiNo ratings yet
- Book Aero PDFDocument781 pagesBook Aero PDFAnderson ZambrzyckiNo ratings yet
- Reducing Fuel ConsumptionDocument6 pagesReducing Fuel ConsumptionAnderson ZambrzyckiNo ratings yet
- Teaching Motor-Racing EngineeringDocument7 pagesTeaching Motor-Racing EngineeringAnderson ZambrzyckiNo ratings yet
- Vehicle Component and ECU DevelopmentDocument27 pagesVehicle Component and ECU DevelopmentAnderson ZambrzyckiNo ratings yet
- Fiat X19 Performance Handbook - Ron Collins PDFDocument64 pagesFiat X19 Performance Handbook - Ron Collins PDFAnderson ZambrzyckiNo ratings yet
- Mother Tongue Based Instruction in The Newly Implemented K To 12 Curriculum of The PhilippinesDocument16 pagesMother Tongue Based Instruction in The Newly Implemented K To 12 Curriculum of The PhilippinesEi JayNo ratings yet
- Environmental and Chemical Policy Module3Document47 pagesEnvironmental and Chemical Policy Module3jahazi1No ratings yet
- Course Information2009 2010Document4 pagesCourse Information2009 2010shihabnittNo ratings yet
- Important Points in SurveyingDocument4 pagesImportant Points in SurveyingAnand BossNo ratings yet
- Best S and Nocella, III (Eds.) - Igniting A Revolution - Voices in Defense of The Earth PDFDocument455 pagesBest S and Nocella, III (Eds.) - Igniting A Revolution - Voices in Defense of The Earth PDFRune Skjold LarsenNo ratings yet
- Periodicity Review SL KeyDocument4 pagesPeriodicity Review SL KeyYeyoung ParkNo ratings yet
- Learning Activity No.2Document1 pageLearning Activity No.2Miki AntonNo ratings yet
- Ericsson Private 5G Solution BriefDocument5 pagesEricsson Private 5G Solution BriefTanesan WyotNo ratings yet
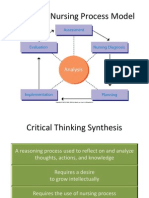
- NUR 104 Nursing Process MY NOTESDocument77 pagesNUR 104 Nursing Process MY NOTESmeanne073100% (1)
- Bachelors of Engineering: Action Research Project - 1Document18 pagesBachelors of Engineering: Action Research Project - 1manasi rathiNo ratings yet
- Isp List MatiurDocument3 pagesIsp List Matiurmatiur7No ratings yet
- Marshall Mix Design (Nptel - ceTEI - L26 (1) )Document7 pagesMarshall Mix Design (Nptel - ceTEI - L26 (1) )andrewcwng0% (1)
- 56257375851Document3 pages56257375851Anneliese FernandesNo ratings yet
- CompTIAN10 004Document169 pagesCompTIAN10 004Ian RegoNo ratings yet
- Ibridge Product Spec SheetDocument2 pagesIbridge Product Spec SheetanupamNo ratings yet
- Store Docket - Wood PeckerDocument89 pagesStore Docket - Wood PeckerRakesh KumarNo ratings yet
- Proac Studio 100: Monitor Level Performance From An Established Compact DesignDocument2 pagesProac Studio 100: Monitor Level Performance From An Established Compact DesignAnonymous c3vuAsWANo ratings yet
- Thermal ComfortDocument50 pagesThermal ComfortSSNo ratings yet
- Firststep To AlaskaDocument28 pagesFirststep To AlaskaBarbara NelsonNo ratings yet
- Self-Actualization in Robert Luketic'S: Legally Blonde: A HumanisticDocument10 pagesSelf-Actualization in Robert Luketic'S: Legally Blonde: A HumanisticAyeshia FréyNo ratings yet
- Bach Polonaise G Min BWV 119 A4Document1 pageBach Polonaise G Min BWV 119 A4vincenzovaiaNo ratings yet
- Christine Remembered That Today Is The Birthday of Her BossDocument1 pageChristine Remembered That Today Is The Birthday of Her BossA.No ratings yet
- How To Spend An Hour A Day in Prayer - Matthew 26:40-41Document1 pageHow To Spend An Hour A Day in Prayer - Matthew 26:40-41Steve GainesNo ratings yet
- Project in Precal: Mary Joyce MolinesDocument11 pagesProject in Precal: Mary Joyce MolinesJaja KeykNo ratings yet
- The Senior High School in The Phillipines: The Way To The WorldDocument5 pagesThe Senior High School in The Phillipines: The Way To The WorldRodel Ramos DaquioagNo ratings yet
- 1939 - Hammer - Terrain Corrections For Gravimeter StationsDocument11 pages1939 - Hammer - Terrain Corrections For Gravimeter Stationslinapgeo09100% (1)
- Primefaces Users Guide 3 5cDocument497 pagesPrimefaces Users Guide 3 5calvarolucasNo ratings yet
- Omega 900 InstructionsDocument27 pagesOmega 900 InstructionsRA Dental LaboratoryNo ratings yet