You might also like
- Auto Transformer StarterDocument9 pagesAuto Transformer Starterdiana100% (2)
- Automatic Star Delta Starter Using Relay and Adjustable Electronic Timer For 3 Phase Induction MotorDocument8 pagesAutomatic Star Delta Starter Using Relay and Adjustable Electronic Timer For 3 Phase Induction MotorNoushz channelNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Basics of 3phase Induction Motor Part 1Document4 pagesBasics of 3phase Induction Motor Part 1TigrilloNo ratings yet
- Induction Generator Starting MethodsDocument5 pagesInduction Generator Starting MethodsChathuranga NagasingheNo ratings yet
- Starting Methods of Induction MotorsDocument8 pagesStarting Methods of Induction MotorsChathuranga Nagasinghe100% (1)
- Unit-4-Electrical Machines: Lecture-3 Starting methods of 3-Φ Induction MotorDocument13 pagesUnit-4-Electrical Machines: Lecture-3 Starting methods of 3-Φ Induction MotorPratik SarkarNo ratings yet
- Everything You Need to Know About GeneratorsDocument12 pagesEverything You Need to Know About GeneratorsMuhammad Ali Khan Awan100% (1)
- AC 3 Phase Induction MotorsDocument10 pagesAC 3 Phase Induction MotorsTuhin HandaNo ratings yet
- Mcqs (Transformers) : Electrical Machine Final RevisionDocument5 pagesMcqs (Transformers) : Electrical Machine Final Revisionmoooo yii trrhjNo ratings yet
- Analysis of Different Starting Methods of Induction Motor Ijariie4421Document11 pagesAnalysis of Different Starting Methods of Induction Motor Ijariie4421MADAO sanNo ratings yet
- Star Delta Starter Using Three Phase IndDocument5 pagesStar Delta Starter Using Three Phase Indhichamkassem22No ratings yet
- STAR DELTA STARTERDocument13 pagesSTAR DELTA STARTERnazar750No ratings yet
- Hapter I: NtroductionDocument41 pagesHapter I: NtroductionGadhi LadkiNo ratings yet
- Lab 14 - 3-Phase AlternatorDocument7 pagesLab 14 - 3-Phase AlternatorjalilemadiNo ratings yet
- STAR DELTA Connection Diagram and Working PrincipleDocument2 pagesSTAR DELTA Connection Diagram and Working PrinciplePrasant Kumar100% (5)
- Why LT Motors Are Delta Connected and HT Motors Are Star Connected - 4Document2 pagesWhy LT Motors Are Delta Connected and HT Motors Are Star Connected - 4Shah JayNo ratings yet
- 3 PH Induction Motor IntroductionDocument37 pages3 PH Induction Motor IntroductionNaga Raju AngajalaNo ratings yet
- Starting Method of MotorsDocument9 pagesStarting Method of MotorsRanil FernandoNo ratings yet
- Three Phase Induction Motor Interview Questions 2 1Document24 pagesThree Phase Induction Motor Interview Questions 2 1Kulshresth Joshi100% (1)
- IJRPR3553Document4 pagesIJRPR3553everhealthlifesciencesNo ratings yet
- Induction Motor: Working Principle, Types, &Document6 pagesInduction Motor: Working Principle, Types, &0409piyushNo ratings yet
- ColchaI Starting MethodsDocument8 pagesColchaI Starting Methodsivancho04mNo ratings yet
- Induction Motor Working Principle Types PDFDocument6 pagesInduction Motor Working Principle Types PDFdumpyNo ratings yet
- Electrical Machines - II (Unit 4)Document13 pagesElectrical Machines - II (Unit 4)kumararguruNo ratings yet
- UNIT-III Three Phase & Single Phase Induction MotorsDocument8 pagesUNIT-III Three Phase & Single Phase Induction MotorsRahulRamamoorthyNo ratings yet
- Motor StartersDocument9 pagesMotor Startersanon_896479742No ratings yet
- Starting & Speeed Control of Three Phase Induction MotorsDocument9 pagesStarting & Speeed Control of Three Phase Induction MotorsAshutoshNo ratings yet
- 3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqDocument13 pages3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqInternational Journal of computational Engineering research (IJCER)No ratings yet
- Starting Methods of Three Phase Induction Motors: Direct-On-Line (DOL) StartersDocument4 pagesStarting Methods of Three Phase Induction Motors: Direct-On-Line (DOL) Startersrajat nimjeNo ratings yet
- Em Ii PDFDocument76 pagesEm Ii PDFRavi SharmaNo ratings yet
- 3-P Induction MotorDocument10 pages3-P Induction MotorPrem SagarNo ratings yet
- Lec4 Polyphase Induction Motor IIDocument14 pagesLec4 Polyphase Induction Motor IIMohammed Dyhia AliNo ratings yet
- Automatic Star Delta StarterDocument11 pagesAutomatic Star Delta StarterAmg 360No ratings yet
- MOTORS: PRINCIPLES AND TYPESDocument11 pagesMOTORS: PRINCIPLES AND TYPESAbishek AbiNo ratings yet
- EE6504-Electrical Machines - II-306544629-Em II Unit 4Document20 pagesEE6504-Electrical Machines - II-306544629-Em II Unit 4Rajeev ValunjkarNo ratings yet
- Starting and Speed Control MethodsDocument20 pagesStarting and Speed Control MethodsRajeev ValunjkarNo ratings yet
- Chapter-2: Dynamic Behavior of Electric DrivesDocument43 pagesChapter-2: Dynamic Behavior of Electric DrivesMuket AgmasNo ratings yet
- STAR DELTA Connection Diagram and Working PrincipleDocument2 pagesSTAR DELTA Connection Diagram and Working PrincipleJabir QuadriNo ratings yet
- Single phase induction motor working explained in 40 stepsDocument57 pagesSingle phase induction motor working explained in 40 stepsChristian Malaluan100% (1)
- 1-EM Section 1 Motor OperationDocument38 pages1-EM Section 1 Motor Operationmhafidz49No ratings yet
- Dr. Ali Abdul Razzaq ALTAHIR: Lecture 6: Third ClassDocument20 pagesDr. Ali Abdul Razzaq ALTAHIR: Lecture 6: Third ClassAli Altahir100% (1)
- Single Phase Induction Motors Single Phase Induction Motors Inductor CapacitorDocument6 pagesSingle Phase Induction Motors Single Phase Induction Motors Inductor CapacitoragreykatoNo ratings yet
- Star Delta starter reduces motor starting currentDocument2 pagesStar Delta starter reduces motor starting currentlcmscheid9954No ratings yet
- STAR DELTA motor starter diagram and working principleDocument2 pagesSTAR DELTA motor starter diagram and working principlePradeepChandraVarmaMandapatiNo ratings yet
- AIM: Comparative Study of Different Types of Starters Used For Three-Phase Induction MotorDocument8 pagesAIM: Comparative Study of Different Types of Starters Used For Three-Phase Induction MotorRD GamingNo ratings yet
- Why Use Very High Voltages in Power TransmissionDocument42 pagesWhy Use Very High Voltages in Power TransmissionKhan YousafzaiNo ratings yet
- Three Phase Induction MotorDocument16 pagesThree Phase Induction MotorPushan Kumar DattaNo ratings yet
- Ee 143-Module VDocument7 pagesEe 143-Module VDELIZO ARNOLD LEMUEL S.No ratings yet
- Unit 2 2marksDocument6 pagesUnit 2 2marksKannan TindivanamNo ratings yet
- Induction Motor Starting Methods ExplainedDocument9 pagesInduction Motor Starting Methods ExplainedMADHUNo ratings yet
- Induction MotorDocument43 pagesInduction MotorJanine Jade SetiasNo ratings yet
- Single Phase Induction MotorsDocument19 pagesSingle Phase Induction MotorsRahulGundeNo ratings yet
- Understanding Motor Contribution to Short CircuitsDocument2 pagesUnderstanding Motor Contribution to Short CircuitsIsagani MadridNo ratings yet
- Lab 07 - DC MotorsDocument9 pagesLab 07 - DC MotorsChamila SumathiratnaNo ratings yet
- Answers 4,5,6Document8 pagesAnswers 4,5,6Mohsin TariqNo ratings yet
- Eto Question No.4Document3 pagesEto Question No.4kidanemariam teseraNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Calculations Results Summary From To K D L Z N VD VDT VR %VD Item No. Wire/Cable Size, MM Conduit TypeDocument2 pagesCalculations Results Summary From To K D L Z N VD VDT VR %VD Item No. Wire/Cable Size, MM Conduit TypeEdison EstrellaNo ratings yet
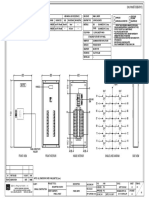
- 06 - Panel Lpb2-Panel LayoutDocument1 page06 - Panel Lpb2-Panel LayoutEdison EstrellaNo ratings yet
- 06 - Panel Lpb2-Panel LayoutDocument1 page06 - Panel Lpb2-Panel LayoutEdison EstrellaNo ratings yet
- 07 - Panel Whpb-Panel LayoutDocument1 page07 - Panel Whpb-Panel LayoutEdison EstrellaNo ratings yet
- Cable impedance calculation tableDocument15 pagesCable impedance calculation tableEdison EstrellaNo ratings yet
- 04 - Panel Apb3-Panel LayoutDocument1 page04 - Panel Apb3-Panel LayoutEdison EstrellaNo ratings yet
- 04 - Panel Apb3-Panel LayoutDocument1 page04 - Panel Apb3-Panel LayoutEdison EstrellaNo ratings yet
- TP9 American and European StandardsDocument27 pagesTP9 American and European StandardsEdison EstrellaNo ratings yet
- TP2 PRC Updates 2018-ANCDocument42 pagesTP2 PRC Updates 2018-ANCEdison EstrellaNo ratings yet
- TP3 Energy Storage The Next DisruptorDocument25 pagesTP3 Energy Storage The Next DisruptorEdison EstrellaNo ratings yet
- How To Select AC Converter For VSD?: ChecklistDocument2 pagesHow To Select AC Converter For VSD?: ChecklistEdison EstrellaNo ratings yet
- STP1 Westco Electrical & Equipment Power AssetDocument27 pagesSTP1 Westco Electrical & Equipment Power AssetEdison EstrellaNo ratings yet
- 06 - Panel Lpb2-Panel LayoutDocument1 page06 - Panel Lpb2-Panel LayoutEdison EstrellaNo ratings yet
- 01 - Panel Mdp-Panel LayoutDocument1 page01 - Panel Mdp-Panel LayoutEdison EstrellaNo ratings yet
- The Best Applications For VFDS: Hvac InductionmotorDocument2 pagesThe Best Applications For VFDS: Hvac InductionmotorEdison EstrellaNo ratings yet
- 5.6 Why - Do - We - Need - Variable - Speed - Drives - VSDDocument4 pages5.6 Why - Do - We - Need - Variable - Speed - Drives - VSDEdison EstrellaNo ratings yet
- International Electrotechnical Commission Standards GuideDocument33 pagesInternational Electrotechnical Commission Standards GuideEdison EstrellaNo ratings yet
- 5.4 LT - Medium - HT - VFD - Used - in - The - Industry - Part - 1Document7 pages5.4 LT - Medium - HT - VFD - Used - in - The - Industry - Part - 1Edison EstrellaNo ratings yet
- 5.1 AC - Adjustable - Speed - Drive - ASD - An - OverviewDocument4 pages5.1 AC - Adjustable - Speed - Drive - ASD - An - OverviewEdison EstrellaNo ratings yet
- How VFDs Improve Cane Mill Efficiency and Reduce Energy CostsDocument5 pagesHow VFDs Improve Cane Mill Efficiency and Reduce Energy CostsEdison EstrellaNo ratings yet
- 5.2 Advantages - of - Variable - Speed - MotorsDocument4 pages5.2 Advantages - of - Variable - Speed - MotorsEdison EstrellaNo ratings yet
- Industrial Applications of Brushless ServomotorDocument11 pagesIndustrial Applications of Brushless ServomotorRobert GalarzaNo ratings yet
- Split-Phase Motors For Medium-Duty Applications: EdvardDocument2 pagesSplit-Phase Motors For Medium-Duty Applications: EdvardEdison EstrellaNo ratings yet
- 4.5 Selection - of - Crane - Duty - Motors - Part - 2Document5 pages4.5 Selection - of - Crane - Duty - Motors - Part - 2Edison EstrellaNo ratings yet
- 4.4 Selection - of - Crane - Duty - Motors - Part - 1Document4 pages4.4 Selection - of - Crane - Duty - Motors - Part - 1Edison EstrellaNo ratings yet
- 4.6 Selection - of - Crane - Duty - Motors - Part - 3Document4 pages4.6 Selection - of - Crane - Duty - Motors - Part - 3Edison EstrellaNo ratings yet
- 4.9 Motors - For - Hazardous - AreasDocument4 pages4.9 Motors - For - Hazardous - AreasEdison EstrellaNo ratings yet
- Selection of Induction Motors for Industrial Applications (part 3Document5 pagesSelection of Induction Motors for Industrial Applications (part 3Edison EstrellaNo ratings yet
- Selection of Induction Motors For Industrial Applications (Part 1)Document4 pagesSelection of Induction Motors For Industrial Applications (Part 1)Edison EstrellaNo ratings yet
- Selection of Induction Motors For Industrial Applications (Part 2)Document4 pagesSelection of Induction Motors For Industrial Applications (Part 2)Edison EstrellaNo ratings yet
- Kcppump 8436 PyyiehDocument1 pageKcppump 8436 Pyyiehعالم الصيانة معدات ثقيلة ومعدات خرسانةNo ratings yet
- LAMBDA Laboratory Peristaltic Pump LeafletDocument2 pagesLAMBDA Laboratory Peristaltic Pump Leafletin740No ratings yet
- LNG Industry 2017-03Document132 pagesLNG Industry 2017-03crystalmanNo ratings yet
- Fastach II Screed Manual 22415Document40 pagesFastach II Screed Manual 22415julianmataNo ratings yet
- Puente Grua EquipoDocument28 pagesPuente Grua EquipoGalo AyalaNo ratings yet
- Makerere University 72 Graduation List For May 2022Document160 pagesMakerere University 72 Graduation List For May 2022The Campus Times100% (2)
- Codigos Falla Linde h40Document18 pagesCodigos Falla Linde h40adrián castilloNo ratings yet
- QT013ADocument13 pagesQT013AemmaclickNo ratings yet
- Updates On The Geothermal Energy Development in The PhilippinesDocument5 pagesUpdates On The Geothermal Energy Development in The PhilippinesHarold SumagaysayNo ratings yet
- Unit 50 Condition Monitoring and Fault Diagnosis - Part 01Document44 pagesUnit 50 Condition Monitoring and Fault Diagnosis - Part 01alexandre_motta_3No ratings yet
- MechDocument6 pagesMechapi-236544093No ratings yet
- Edison’s Dream of Cheap ElectricityDocument35 pagesEdison’s Dream of Cheap ElectricityZeeshan Ahmed100% (2)
- Ball Mill Operating Manual 266795 Manual InstrDocument48 pagesBall Mill Operating Manual 266795 Manual InstrHarish Chandra SinghNo ratings yet
- Alstom LGPG111 Service ManualDocument387 pagesAlstom LGPG111 Service ManualCarlos Alonso Morales TelloNo ratings yet
- Isc N-Channel MOSFET Transistor IRFP450A: INCHANGE Semiconductor Product SpecificationDocument2 pagesIsc N-Channel MOSFET Transistor IRFP450A: INCHANGE Semiconductor Product Specificationnanang c-kakakNo ratings yet
- IGNITING QUANG TRI WEEKS AHEAD OF SCHEDULEDocument2 pagesIGNITING QUANG TRI WEEKS AHEAD OF SCHEDULENguyen Khanh MinhNo ratings yet
- Lecture Notes on Temperature, Thermal Equilibrium, and the Microscopic Model of an Ideal GasDocument5 pagesLecture Notes on Temperature, Thermal Equilibrium, and the Microscopic Model of an Ideal GasDonald Ng Jer YiNo ratings yet
- Determination of Density and Specific Gravity of LiquidsDocument10 pagesDetermination of Density and Specific Gravity of LiquidsAubrey EnriquezNo ratings yet
- Ata CodesDocument10 pagesAta CodesIvo SilvaNo ratings yet
- Positively Innovative: Instructions For Use and HandlingDocument16 pagesPositively Innovative: Instructions For Use and HandlingNelson MartinsNo ratings yet
- Automatic Switch-Onto-Fault Function For Distance ProtectionDocument6 pagesAutomatic Switch-Onto-Fault Function For Distance ProtectionRhun Riang ChuahNo ratings yet
- OISD 226 Natural Gas and CGD NetworkDocument75 pagesOISD 226 Natural Gas and CGD NetworkVartika UpretyNo ratings yet
- Insulation Piercing Conductors PDFDocument12 pagesInsulation Piercing Conductors PDFVepty whoopsNo ratings yet
- Steeltrusses 170323101523Document22 pagesSteeltrusses 170323101523Mohan SaragadamNo ratings yet
- NASA Surface Meteorology and Solar Energy - Available TablesDocument5 pagesNASA Surface Meteorology and Solar Energy - Available TablesShayan AhmedNo ratings yet
- Case Study Scavenge FireDocument4 pagesCase Study Scavenge FirepoetoetNo ratings yet
- 8 INHE SD NF2 OM MTR002 A Three Phase Smart Meter Operation Manual FRDocument154 pages8 INHE SD NF2 OM MTR002 A Three Phase Smart Meter Operation Manual FRHous Sam100% (2)
- SMC TchnologyDocument10 pagesSMC TchnologyEliasPelozatoNo ratings yet
- Suparco+ KRL Test Ques For Electrical EngrzDocument5 pagesSuparco+ KRL Test Ques For Electrical Engrzمحمد فصیح آفتابNo ratings yet