You might also like
- Ieee CinematicaDocument5 pagesIeee CinematicaJose Garcia NovoaNo ratings yet
- Balancing Control of A Two Wheeled Mobile Robot SystemDocument7 pagesBalancing Control of A Two Wheeled Mobile Robot SystemAbdellilah HattabNo ratings yet
- Self Balancing PID ControlDocument8 pagesSelf Balancing PID ControlMohit SinghNo ratings yet
- Robô Pêndulo 2 Rodas - 1Document7 pagesRobô Pêndulo 2 Rodas - 1Victor PassosNo ratings yet
- 1 PBDocument7 pages1 PBFyndi Aw AwNo ratings yet
- Path Tracking of Mobile Robot in CropsDocument13 pagesPath Tracking of Mobile Robot in CropsJohn Jairo AvendañoNo ratings yet
- Remote State Feedback Motion Control for Mobile RobotsDocument6 pagesRemote State Feedback Motion Control for Mobile RobotsFauzan AnshariNo ratings yet
- Paper Khas 2014Document13 pagesPaper Khas 2014AmmarALJodahNo ratings yet
- MIMO Fuzzy Control For Autonomous Mobile RobotDocument6 pagesMIMO Fuzzy Control For Autonomous Mobile RobotaliNo ratings yet
- Design and Simulation of Two-Wheeled Balancing Mobile Robot With PID ControllerDocument9 pagesDesign and Simulation of Two-Wheeled Balancing Mobile Robot With PID ControllerHarish rajanNo ratings yet
- 2 PBDocument9 pages2 PBLong NguyenNo ratings yet
- Low level control of an omnidirectional mobile robotDocument7 pagesLow level control of an omnidirectional mobile robotPrakhar SrivastavaNo ratings yet
- Implementation of FPGA Based Efficient Gait Controller For A Biped RobotDocument1 pageImplementation of FPGA Based Efficient Gait Controller For A Biped RobotDrNaveed Ul HaqNo ratings yet
- Zainaib JasssimDocument9 pagesZainaib JasssimAs AdNo ratings yet
- Feedback Control of A Balancing RobotDocument6 pagesFeedback Control of A Balancing RobotEsteban GutiérrezNo ratings yet
- Imtc RobotNavigation 7594Document5 pagesImtc RobotNavigation 7594flv_91No ratings yet
- Online Control of DC Motors Using Fuzzy Logic for Remote RobotsDocument11 pagesOnline Control of DC Motors Using Fuzzy Logic for Remote RobotsHafidh Eki FauziNo ratings yet
- Implementation of VFHDocument6 pagesImplementation of VFHqwerty uNo ratings yet
- Self Balancing Two-Wheel LocomotiveDocument55 pagesSelf Balancing Two-Wheel LocomotiveSujay PawarNo ratings yet
- Tracking Control 3 Omni Wheel ModelDocument15 pagesTracking Control 3 Omni Wheel ModelRangga NaufalNo ratings yet
- Ies2015 Movcascadedpid PDFDocument6 pagesIes2015 Movcascadedpid PDFAkbar BaharuddinNo ratings yet
- Literature ReviewDocument14 pagesLiterature ReviewMohammed Razwin K PNo ratings yet
- Robust Adaptive Control For Mobile Manipulators: International Journal of Automation and Computing February 2011Document7 pagesRobust Adaptive Control For Mobile Manipulators: International Journal of Automation and Computing February 2011Chandrasekar ElankannanNo ratings yet
- Autonomous Wheelchair Navigation in Indoor Environment Based On Fuzzy Logic Controller and Intermediate TargetsDocument5 pagesAutonomous Wheelchair Navigation in Indoor Environment Based On Fuzzy Logic Controller and Intermediate TargetsedwcaranNo ratings yet
- Mobile Robot LyaponovDocument5 pagesMobile Robot Lyaponovbmtoan5401No ratings yet
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 pagesEEE 1207 021 6 DOF Robotic Arm ManipulatorCarlos Rodriguez RNo ratings yet
- F 3400083614Document4 pagesF 3400083614aminhardNo ratings yet
- Multi-robot formation control for outdoor environmentsDocument9 pagesMulti-robot formation control for outdoor environmentsDaudNo ratings yet
- Modelling of Mobile Robot Dynamics: JANUARY 2010Document10 pagesModelling of Mobile Robot Dynamics: JANUARY 2010NguyễnĐạtNo ratings yet
- Curvature Based Velocity Control System For Mobile Robot: Pengfei Wang and Kosuke SekiyamaDocument6 pagesCurvature Based Velocity Control System For Mobile Robot: Pengfei Wang and Kosuke SekiyamaRavi RanjanNo ratings yet
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 pagesEEE 1207 021 6 DOF Robotic Arm ManipulatorUNsha bee komNo ratings yet
- Robust control of a two-wheeled robotDocument6 pagesRobust control of a two-wheeled robotChandrajit GangulyNo ratings yet
- Design of A PID Optimized Neural Networks and PD Fuzzy Logic Controllers For A Two-Wheeled Mobile RobotDocument19 pagesDesign of A PID Optimized Neural Networks and PD Fuzzy Logic Controllers For A Two-Wheeled Mobile Robotyazen H ShakirNo ratings yet
- Dynamic Modelling and Simulation of A Three-Wheeled Omnidirectional Mobile Robot: Bond Graph ApproachDocument6 pagesDynamic Modelling and Simulation of A Three-Wheeled Omnidirectional Mobile Robot: Bond Graph ApproachAang junaidiNo ratings yet
- Robot PID Control OverviewDocument20 pagesRobot PID Control OverviewTeck Soon TeoNo ratings yet
- Fuzzy Logic of Speed and Steering Control System For Three Dimensional Line Following of An Autonomous VehicleDocument8 pagesFuzzy Logic of Speed and Steering Control System For Three Dimensional Line Following of An Autonomous Vehiclealeena_bcNo ratings yet
- Energy Comparison of Controllers Used For A Differential Drive Wheeled Mobile RobotDocument13 pagesEnergy Comparison of Controllers Used For A Differential Drive Wheeled Mobile RobotElias GarcíaNo ratings yet
- Robot Manipulator Guidance ControlDocument19 pagesRobot Manipulator Guidance ControlWilliam VenegasNo ratings yet
- Performance Comparison Between Fuzzy Logic Controller (FLC) and PID Controller For A Highly Nonlinear Two-Wheels Balancing RobotDocument6 pagesPerformance Comparison Between Fuzzy Logic Controller (FLC) and PID Controller For A Highly Nonlinear Two-Wheels Balancing RobotVignesh RamakrishnanNo ratings yet
- FasfasDocument8 pagesFasfasRifqi FirlianNo ratings yet
- Ieee Cinematica2Document4 pagesIeee Cinematica2Jose Garcia NovoaNo ratings yet
- Quadrotor UAV Fuzzy Control for PID Tuning in Hover ModeDocument6 pagesQuadrotor UAV Fuzzy Control for PID Tuning in Hover ModeGál Károly-IstvánNo ratings yet
- Robust Navigational Control of a Two-Wheeled Self-Balancing Robot Using PD-PI ControllerDocument12 pagesRobust Navigational Control of a Two-Wheeled Self-Balancing Robot Using PD-PI ControllerVickey VigneshNo ratings yet
- Altitude Controller Design For Multi-Copter UAVDocument6 pagesAltitude Controller Design For Multi-Copter UAVPRACHI KATARENo ratings yet
- (Elearnica - Ir) - Robotic Systems Applied To Power Substations - A State-Of-The-Art SurveyDocument6 pages(Elearnica - Ir) - Robotic Systems Applied To Power Substations - A State-Of-The-Art SurveyjorjijonNo ratings yet
- 2018 Iastem Robust Gpi ControllerDocument6 pages2018 Iastem Robust Gpi ControllerAntonio BanderasNo ratings yet
- Remote Lab For Robotics Applications: Abstract-This Article Describes The Development of A Remote Lab EnvironDocument8 pagesRemote Lab For Robotics Applications: Abstract-This Article Describes The Development of A Remote Lab Environagusriki3440No ratings yet
- Ramezani 2020Document7 pagesRamezani 2020Nguyễn PhúcNo ratings yet
- Sliding-Mode Formation Control For Cooperative Autonomous Mobile RobotsDocument10 pagesSliding-Mode Formation Control For Cooperative Autonomous Mobile RobotsNardenioMartinsNo ratings yet
- 3D Robots Formation Cooperative Control Using Efds: October 2018Document7 pages3D Robots Formation Cooperative Control Using Efds: October 2018Ayoub KhelifatiNo ratings yet
- Dynamic Modelling and Simulation of a QuadrotorDocument19 pagesDynamic Modelling and Simulation of a QuadrotorSidharth Suresh KumarNo ratings yet
- NTP - 2021 - 028 - Research PaperDocument5 pagesNTP - 2021 - 028 - Research PaperSahanNo ratings yet
- MIPRO2014final 1Document7 pagesMIPRO2014final 1Ali ErNo ratings yet
- Zimit 2018Document16 pagesZimit 2018Trường Quang NguyễnNo ratings yet
- Trajectory Planning and Control of One-Legged Hopping Robot at Thrusting PhaseDocument8 pagesTrajectory Planning and Control of One-Legged Hopping Robot at Thrusting PhaseAlina MirelaNo ratings yet
- Global Uncalibrated Visual Servoing ForDocument9 pagesGlobal Uncalibrated Visual Servoing Forlenardorosasco96No ratings yet
- Advanced Techniques and Technology of Computer-Aided Feedback ControlFrom EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlNo ratings yet
- Brief C NotesDocument20 pagesBrief C NotesVon JinNo ratings yet
- Tutorial 5 Equipment Selection, Erection, Inspection and TestingDocument1 pageTutorial 5 Equipment Selection, Erection, Inspection and TestingVon JinNo ratings yet
- LECTURE 7 (B) Essay Writing: Developmental ParagraphsDocument2 pagesLECTURE 7 (B) Essay Writing: Developmental ParagraphsVon JinNo ratings yet
- Tutorial Topic 1 Fundamentals of Electrical Distribution and Utilisation - Part 1 2015Document5 pagesTutorial Topic 1 Fundamentals of Electrical Distribution and Utilisation - Part 1 2015Von JinNo ratings yet
- Tutorial Topic 6 Energy EfficiencyDocument1 pageTutorial Topic 6 Energy EfficiencyVon JinNo ratings yet
- Tutorial 4 Electrical Installation and DesignDocument1 pageTutorial 4 Electrical Installation and DesignVon JinNo ratings yet
- Tutorial 3 Protection For SafetyDocument2 pagesTutorial 3 Protection For SafetyVon JinNo ratings yet
- PLC Ladder Diagram Chapter Explains Relay and PLC ProgrammingDocument63 pagesPLC Ladder Diagram Chapter Explains Relay and PLC ProgrammingVon JinNo ratings yet
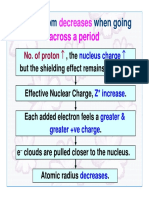
- Size of Atom When Going: Across A PeriodDocument9 pagesSize of Atom When Going: Across A PeriodVon JinNo ratings yet
- Chapter 1 - Introduction To Process ControlDocument60 pagesChapter 1 - Introduction To Process ControlVon JinNo ratings yet
- Tutorial 1S Biomolecules AmendedDocument5 pagesTutorial 1S Biomolecules AmendedVon JinNo ratings yet
- Reaction of Hydroxide Compound (Group I)Document9 pagesReaction of Hydroxide Compound (Group I)Von JinNo ratings yet
- Chapter 4 - Analog Signal ConditioningDocument85 pagesChapter 4 - Analog Signal ConditioningVon JinNo ratings yet
- Chapter 3 - Continuously Process ControlDocument84 pagesChapter 3 - Continuously Process ControlVon Jin100% (1)
- FHMM1034 Chapter 1 Coordinate GeometryDocument23 pagesFHMM1034 Chapter 1 Coordinate GeometryTie Teck HoeNo ratings yet
- Discrete State Process ControlDocument37 pagesDiscrete State Process ControlVon JinNo ratings yet
- Topic 1 Biomolecules 03 Lecture STUDENT 201201 Part1Document63 pagesTopic 1 Biomolecules 03 Lecture STUDENT 201201 Part1Von JinNo ratings yet
- Similarities Ond Differences: Frotn Seeiry It As A F/n. Mren You Read A Story, YouDocument2 pagesSimilarities Ond Differences: Frotn Seeiry It As A F/n. Mren You Read A Story, YouVon JinNo ratings yet
- Adaptive Phototransistor Sensor For Line FindingDocument7 pagesAdaptive Phototransistor Sensor For Line FindingHo Van RoiNo ratings yet
- Topic 1 Biomolecules 03 Lecture STUDENT 201201 Part2Document55 pagesTopic 1 Biomolecules 03 Lecture STUDENT 201201 Part2Von JinNo ratings yet
- Group 14 Element TrendsDocument26 pagesGroup 14 Element TrendsVon JinNo ratings yet
- C Programming For Embedded System Applications PDFDocument54 pagesC Programming For Embedded System Applications PDFWendo David PesaNo ratings yet
- Current Sensorless Control of A PMDC Motor Using Kalman Filter and Cascaded PID ControllerDocument6 pagesCurrent Sensorless Control of A PMDC Motor Using Kalman Filter and Cascaded PID ControllerVon JinNo ratings yet
- Process Control Using A PID ControllerDocument12 pagesProcess Control Using A PID ControllerVon JinNo ratings yet
- Embedded SystemDocument53 pagesEmbedded Systemgsing300No ratings yet
- Brief C NotesDocument20 pagesBrief C NotesVon JinNo ratings yet
- Brief C NotesDocument20 pagesBrief C NotesVon JinNo ratings yet
- The PID Control Algorithm (How It Works, How To Tune It, and How To Use It)Document68 pagesThe PID Control Algorithm (How It Works, How To Tune It, and How To Use It)Von JinNo ratings yet
- Malaysia PAM Standard Form of Contract 2006 (With Qty)Document54 pagesMalaysia PAM Standard Form of Contract 2006 (With Qty)Von Jin100% (1)
- FSMODocument3 pagesFSMOsivadashxyz8066No ratings yet
- Primavera 150 3VDocument67 pagesPrimavera 150 3VacbNo ratings yet
- What's New: Creo Simulate 4.0: Datecode F000 and LaterDocument18 pagesWhat's New: Creo Simulate 4.0: Datecode F000 and LaterBaskaran BossNo ratings yet
- Grievance Redressal Mechanism in Telecom Services Sector Vodafone ResponsivenessDocument5 pagesGrievance Redressal Mechanism in Telecom Services Sector Vodafone ResponsivenesssjdsjNo ratings yet
- GE Fuji AF 300 VFD ManualDocument44 pagesGE Fuji AF 300 VFD ManualAnderson GonçalvesNo ratings yet
- Huawei CloudEngine S5731-H Series Switches BrochureDocument13 pagesHuawei CloudEngine S5731-H Series Switches BrochureMurillo SilvaNo ratings yet
- Lab Design and Analysis of Active CS and Cascode AmplifierDocument3 pagesLab Design and Analysis of Active CS and Cascode AmplifierAzure HereNo ratings yet
- Computer Security Log BookDocument13 pagesComputer Security Log Bookhappinessokon750No ratings yet
- Presentation On Latest Trends in Power System by Chandan Kumar ChandaDocument43 pagesPresentation On Latest Trends in Power System by Chandan Kumar Chandaanon_15824371971% (7)
- Boot Options PDFDocument6 pagesBoot Options PDFBashar MohammedNo ratings yet
- Database System With Administration: Technical AssessmentDocument7 pagesDatabase System With Administration: Technical AssessmentNuriel AguilarNo ratings yet
- Implementing High Availability andDocument226 pagesImplementing High Availability andiliyasmanerNo ratings yet
- Wangkheirakpam2021 Article LinearityPerformanceAndIntermoDocument9 pagesWangkheirakpam2021 Article LinearityPerformanceAndIntermosharmasamriti27No ratings yet
- Motor de Arranque - EspecificacionDocument1 pageMotor de Arranque - EspecificacionGuido Asqui FloresNo ratings yet
- CR 300Document128 pagesCR 300Francisco José Fontelles ObelenisNo ratings yet
- What I Can Do 46Document5 pagesWhat I Can Do 46Lliana MarcelNo ratings yet
- Dr. Dela Zerna - AT in The ClassroomDocument28 pagesDr. Dela Zerna - AT in The ClassroomAnonymous okusLzNo ratings yet
- Cad BookDocument86 pagesCad BookGopi RaguNo ratings yet
- Koessler Francis1 EDocument36 pagesKoessler Francis1 Eklcy1987No ratings yet
- Abebe Mulugeta Mis Exam AnswerDocument14 pagesAbebe Mulugeta Mis Exam Answerabebe mulugeta0% (1)
- Oracle Apps Accounting Calendar SetupDocument3 pagesOracle Apps Accounting Calendar SetupRoopu PillariNo ratings yet
- TorchSA-30 June 2023 B2C EMAILDocument85 pagesTorchSA-30 June 2023 B2C EMAILChristiaanNo ratings yet
- 1 0 CustomerEngagement SalesContractManagement 2021Document15 pages1 0 CustomerEngagement SalesContractManagement 2021bilix76No ratings yet
- CIS RAM For IG1 Workbook v21.10.25Document144 pagesCIS RAM For IG1 Workbook v21.10.25pikanteNo ratings yet
- TSA 1000XEn112 PDFDocument83 pagesTSA 1000XEn112 PDFJoseph BoshehNo ratings yet
- FOB2-3 TS - Technical Manual - Section 2 - Installation SpecificationsDocument10 pagesFOB2-3 TS - Technical Manual - Section 2 - Installation SpecificationsmaghraouiNo ratings yet
- Guidelines For Passenger Services at European AirportsDocument120 pagesGuidelines For Passenger Services at European AirportsJPFJ12100% (2)
- A Presentation On: Status of Construction Procedures of Nepal & E-Bidding For Contract DocumentationDocument27 pagesA Presentation On: Status of Construction Procedures of Nepal & E-Bidding For Contract DocumentationShankar KhanalNo ratings yet
- 205-02 Rear Drive Axle and Differential - General Procedures - Ring Gear Backlash AdjustmentDocument14 pages205-02 Rear Drive Axle and Differential - General Procedures - Ring Gear Backlash AdjustmentCARLOS LIMADANo ratings yet
- Five Meter Radio TelescopeDocument17 pagesFive Meter Radio TelescopeaishaNo ratings yet