You might also like
- Volgers 2002Document15 pagesVolgers 2002junjie yiNo ratings yet
- GSM - Architecture, Protocols and ServicesFrom EverandGSM - Architecture, Protocols and ServicesRating: 1 out of 5 stars1/5 (1)
- 1 FemDocument106 pages1 FemD ManonmaniNo ratings yet
- The Finite Element Method for Electromagnetic ModelingFrom EverandThe Finite Element Method for Electromagnetic ModelingGérard MeunierNo ratings yet
- HV Cable System ProjectDocument25 pagesHV Cable System ProjectBonne BogaertNo ratings yet
- Minimax OptimizationDocument126 pagesMinimax OptimizationThinhNo ratings yet
- Modeling The Uncertainties Involved in Net Transmission Capacity CalculationDocument115 pagesModeling The Uncertainties Involved in Net Transmission Capacity CalculationAlesso RossiNo ratings yet
- Putz-07 Convergence LoopDocument60 pagesPutz-07 Convergence LoopElena StanislavNo ratings yet
- The Heston Mode - A Practical ApproachDocument53 pagesThe Heston Mode - A Practical ApproachGiancarlo GentiliNo ratings yet
- Finite Element Methods For Partial Differential Equations PDFDocument106 pagesFinite Element Methods For Partial Differential Equations PDFDavid GomezNo ratings yet
- Initial Value Methods for Boundary Value Problems: Theory and Application of Invariant ImbeddingFrom EverandInitial Value Methods for Boundary Value Problems: Theory and Application of Invariant ImbeddingNo ratings yet
- Good Estimation Detection NotesDocument11 pagesGood Estimation Detection NotesTalha NadeemNo ratings yet
- Convolutional Neural Networks: Jianxin WuDocument35 pagesConvolutional Neural Networks: Jianxin WuPratik KanadeNo ratings yet
- Bok 3A978 3 319 27128 6Document213 pagesBok 3A978 3 319 27128 6Hesham Hefny100% (1)
- Antenna ProjectDocument28 pagesAntenna ProjectPablo S.ReyeroNo ratings yet
- CC-survey PlainDocument127 pagesCC-survey PlainQin ZhangNo ratings yet
- Optical Fibres: Analysis, Numerical Modelling and OptimisationDocument187 pagesOptical Fibres: Analysis, Numerical Modelling and OptimisationRahul ChoudharyNo ratings yet
- (Heinz Antes) A Short Course On Boundary Element MethodsDocument118 pages(Heinz Antes) A Short Course On Boundary Element MethodsMaria Victoria Morales GalindezNo ratings yet
- Steven 3Document72 pagesSteven 3Steven SergioNo ratings yet
- Posite TransducerDocument16 pagesPosite TransducerSyed Saim GardeziNo ratings yet
- Distributed Robust Min Variance Beamforming: Alexander BrillDocument28 pagesDistributed Robust Min Variance Beamforming: Alexander BrillBerk YılmazNo ratings yet
- Formulation and Numerical Implementation of An Improved Finite Element Model and Its Application To The Study of Ancient Masonry StructuresDocument87 pagesFormulation and Numerical Implementation of An Improved Finite Element Model and Its Application To The Study of Ancient Masonry StructuresGAyalaMNo ratings yet
- PHD Seminar BCDocument44 pagesPHD Seminar BCmgheryaniNo ratings yet
- Van Bemten2016NetworkCalculus AComprehensiveDocument57 pagesVan Bemten2016NetworkCalculus AComprehensiveDaniel RiveroNo ratings yet
- Controls Engineering in FRCDocument236 pagesControls Engineering in FRCDFGNo ratings yet
- MilongaDocument162 pagesMilongaJeremy Theler100% (1)
- Influence of Support Stiffness in Dynamic Analysis of Piping SystemsDocument77 pagesInfluence of Support Stiffness in Dynamic Analysis of Piping SystemssuyogbhaveNo ratings yet
- Three Step Cooperative MIMO RelayingDocument74 pagesThree Step Cooperative MIMO RelayingTracy LawsonNo ratings yet
- Visco VeryDocument37 pagesVisco VeryIrina AlexandraNo ratings yet
- Microkinetic Modeling of Nanoparticle Catalysis Using Density Functional TheoryDocument60 pagesMicrokinetic Modeling of Nanoparticle Catalysis Using Density Functional Theorysheraz ahmadNo ratings yet
- Design and Modeling of InductorsNPAryanDocument88 pagesDesign and Modeling of InductorsNPAryanJoe MullerNo ratings yet
- Molecular Dynamics Simulations in Gromacs: Project ReportDocument36 pagesMolecular Dynamics Simulations in Gromacs: Project ReportHassan ManaaNo ratings yet
- Generic 6-DOF Added Mass Formulation For Arbitrary Underwater VehiclesDocument51 pagesGeneric 6-DOF Added Mass Formulation For Arbitrary Underwater VehiclesebwNo ratings yet
- Low-Noise Amplifier Design and Optimization: Master'S ThesisDocument0 pagesLow-Noise Amplifier Design and Optimization: Master'S Thesisjitu123456789No ratings yet
- Just For FunDocument24 pagesJust For FunThanh PhamNo ratings yet
- Writing Fast MATLAB Code: Pascal Getreuer, June 2006Document26 pagesWriting Fast MATLAB Code: Pascal Getreuer, June 2006BL DRAGOSNo ratings yet
- TR19 003Document99 pagesTR19 003Sparsh JainNo ratings yet
- Sacco Thesis PDFDocument22 pagesSacco Thesis PDFDavid SaccoNo ratings yet
- Bem ShortDocument118 pagesBem ShortNikola AndjelicNo ratings yet
- Quantitative Obata's Theorem: October 2019Document38 pagesQuantitative Obata's Theorem: October 2019sermuratov2020No ratings yet
- TesisDocument53 pagesTesisCristobal Valenzuela MusuraNo ratings yet
- Calculus For Science and EngineeringDocument127 pagesCalculus For Science and EngineeringKeith Lester MallorcaNo ratings yet
- ILP Formulations For The RWA Problem Symmetric SysDocument51 pagesILP Formulations For The RWA Problem Symmetric SysTahiry RANDRIAMAMPIANINANo ratings yet
- Influence of Support Stiff+Document77 pagesInfluence of Support Stiff+Volodymyr PryzNo ratings yet
- Maxcompiler Kernel NumericsDocument25 pagesMaxcompiler Kernel NumericsAkshat GuptaNo ratings yet
- Numerical Methods of Exploration SeismologyDocument225 pagesNumerical Methods of Exploration SeismologyCarlos AlejandroNo ratings yet
- Down TiltingDocument68 pagesDown TiltingSolomon TeshomeNo ratings yet
- Optimisation Theory Lecture NotesDocument139 pagesOptimisation Theory Lecture NotesJenisanKulendiranNo ratings yet
- Department of Electrical EngineeringDocument79 pagesDepartment of Electrical EngineeringConstantin DorinelNo ratings yet
- Computer and Machine Vision 4e - Solution ManualDocument44 pagesComputer and Machine Vision 4e - Solution Manualdekas_guitarhero3616No ratings yet
- Virtual Element MethodDocument56 pagesVirtual Element MethodKherfi AbdelhakNo ratings yet
- Slide Rule Usage PDFDocument17 pagesSlide Rule Usage PDFElaine MoratoNo ratings yet
- Analysis IDocument64 pagesAnalysis IPătularu andreiNo ratings yet
- Notas - Discrete OptimizationDocument97 pagesNotas - Discrete OptimizationCristianDavidFrancoHernandezNo ratings yet
- New 2010 York PerfectDocument9 pagesNew 2010 York Perfectbasl haymourNo ratings yet
- FINANOTECH Registration Form PMP Certification Training Cohort January 2023Document21 pagesFINANOTECH Registration Form PMP Certification Training Cohort January 2023Abhi CaullychurnNo ratings yet
- Selection of Competencies Requiring Ict IntegrationDocument27 pagesSelection of Competencies Requiring Ict IntegrationMarShel Vlogs100% (1)
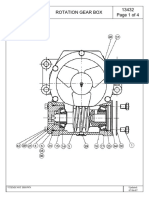
- Caja de Engranes para Pluma DunbarRotationGearBoxDocument4 pagesCaja de Engranes para Pluma DunbarRotationGearBoxMartin CalderonNo ratings yet
- IGCSE COMMERCE Chapter 10.1Document5 pagesIGCSE COMMERCE Chapter 10.1Tahmid Raihan100% (1)
- Hidden Beam DesignDocument8 pagesHidden Beam DesignAnil kumar R100% (1)
- Intrusion Detection System IDS Seminar ReportDocument18 pagesIntrusion Detection System IDS Seminar ReportSahil SethiNo ratings yet
- How To Use Snapchat For Business: Getting Started With SnapchatDocument1 pageHow To Use Snapchat For Business: Getting Started With SnapchatJavier Perez MartinNo ratings yet
- PDF N Fcom Sek TF N Eu 20190311 DSC PLP LeduDocument600 pagesPDF N Fcom Sek TF N Eu 20190311 DSC PLP Leduhussein mohklisNo ratings yet
- Tanque Atlas Copco 2021Document23 pagesTanque Atlas Copco 2021Joel C. VegaNo ratings yet
- Pelina PositionPaperDocument4 pagesPelina PositionPaperJohn Tristan HilaNo ratings yet
- Dx225lca-2 InglesDocument12 pagesDx225lca-2 InglesredwiolNo ratings yet
- Oracle Ow811 Certification Matrix 161594Document8 pagesOracle Ow811 Certification Matrix 161594ps.calado5870No ratings yet
- BargeboardsDocument1 pageBargeboardsDavid O'MearaNo ratings yet
- Conquering Big Data With High Performance ComputingDocument328 pagesConquering Big Data With High Performance Computingmannie100% (1)
- Postgresql 11 A4 PDFDocument2,621 pagesPostgresql 11 A4 PDFGiuliano PertileNo ratings yet
- 3-C - MessageDocument4 pages3-C - MessageArpan GhoshNo ratings yet
- Guide To Computer Forensics and Investigations 5th Edition Bill Test BankDocument11 pagesGuide To Computer Forensics and Investigations 5th Edition Bill Test Bankshelleyrandolphikeaxjqwcr100% (30)
- Lesson 7 - Digital SelfDocument38 pagesLesson 7 - Digital SelfM'Edna AguilarNo ratings yet
- Atc Investor Relations U.S. Technology and 5g Update q4 2020Document35 pagesAtc Investor Relations U.S. Technology and 5g Update q4 2020Valtteri ItärantaNo ratings yet
- Homework #3: MDPS, Q-Learning, &: PomdpsDocument18 pagesHomework #3: MDPS, Q-Learning, &: Pomdpsshivam pradhanNo ratings yet
- Business Statistics Communicating With Numbers 4E 4Th Edition Sanjiv Jaggia Full ChapterDocument67 pagesBusiness Statistics Communicating With Numbers 4E 4Th Edition Sanjiv Jaggia Full Chapterdoris.heck867100% (3)
- D-Code Presentation - Building ABAP Applications Using Code PushdownDocument71 pagesD-Code Presentation - Building ABAP Applications Using Code PushdownMohit PandyaNo ratings yet
- Lesson 2Document10 pagesLesson 2Anore James IvanNo ratings yet
- SBxx-1SP-US-40-IA-xx-16 Instruct ManDocument224 pagesSBxx-1SP-US-40-IA-xx-16 Instruct ManSmellyDog360No ratings yet
- BTech CS 4th Year SyllabusDocument19 pagesBTech CS 4th Year SyllabusRahul Kumar SInhaNo ratings yet
- 5-Day Self-Love Challenge - Big Life JournalDocument16 pages5-Day Self-Love Challenge - Big Life Journalmatias apecenaNo ratings yet
- Attachment - 1Document2 pagesAttachment - 1Abhilash KurianNo ratings yet
- Lecture-3 (Design Methods)Document26 pagesLecture-3 (Design Methods)Mohsin IqbalNo ratings yet
- Accelerating IceCubes Photon Propagation Code WitDocument11 pagesAccelerating IceCubes Photon Propagation Code WitNEed for workNo ratings yet
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsFrom EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsRating: 5 out of 5 stars5/5 (1)
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)From EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Rating: 5 out of 5 stars5/5 (2)
- Beginning AutoCAD® 2020 Exercise WorkbookFrom EverandBeginning AutoCAD® 2020 Exercise WorkbookRating: 2.5 out of 5 stars2.5/5 (3)
- SketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyFrom EverandSketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyRating: 1.5 out of 5 stars1.5/5 (2)
- Autodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersFrom EverandAutodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersNo ratings yet
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Product Manufacturing and Cost Estimating using CAD/CAE: The Computer Aided Engineering Design SeriesFrom EverandProduct Manufacturing and Cost Estimating using CAD/CAE: The Computer Aided Engineering Design SeriesRating: 4 out of 5 stars4/5 (4)
- Contactless Vital Signs MonitoringFrom EverandContactless Vital Signs MonitoringWenjin WangNo ratings yet
- FreeCAD | Design Projects: Design advanced CAD models step by stepFrom EverandFreeCAD | Design Projects: Design advanced CAD models step by stepRating: 5 out of 5 stars5/5 (1)