You might also like
- Pulse and Fourier Transform NMR: Introduction to Theory and MethodsFrom EverandPulse and Fourier Transform NMR: Introduction to Theory and MethodsNo ratings yet
- 1-Detection of Weak Moving Targets Based On 2-D Range-Doppler FMCW Radar Fourier ProcessingDocument4 pages1-Detection of Weak Moving Targets Based On 2-D Range-Doppler FMCW Radar Fourier ProcessingPAULO CÉSAR RIBEIRO MARCIANONo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Evaluation of A High Accuracy Range Detection Algorithm For FMCW/Phase Radar SystemsDocument5 pagesEvaluation of A High Accuracy Range Detection Algorithm For FMCW/Phase Radar SystemsFatima SheikhNo ratings yet
- Impacts of Mutual Interference Analysis in FMCW Automotive RadarDocument5 pagesImpacts of Mutual Interference Analysis in FMCW Automotive RadarRifaqat HussainNo ratings yet
- Vital Signs Monitoring of Multiple People Using A FMCW Millimeter-Wave SensorDocument6 pagesVital Signs Monitoring of Multiple People Using A FMCW Millimeter-Wave SensorThomas GuoNo ratings yet
- CIGRE-107 Fault Location in Extra Long HVDC Transmission Lines Using Discrete Wavelet TransformDocument9 pagesCIGRE-107 Fault Location in Extra Long HVDC Transmission Lines Using Discrete Wavelet TransformkamuikNo ratings yet
- Sensors 18 02831Document11 pagesSensors 18 02831FAISAL RAHIMNo ratings yet
- Transactions Briefs: Analog Computation of Wavelet Transform Coefficients in Real-TimeDocument4 pagesTransactions Briefs: Analog Computation of Wavelet Transform Coefficients in Real-TimeHair MorenoNo ratings yet
- Distance Protection of HVDC Transmission PDFDocument6 pagesDistance Protection of HVDC Transmission PDFadi wirajayaNo ratings yet
- Spread Spectrum Communications Using Chirp SignalsDocument5 pagesSpread Spectrum Communications Using Chirp SignalsArkaprava MajeeNo ratings yet
- A Signal Model For Simultaneous Range-Bearing Estimation in LFMCW RadarDocument6 pagesA Signal Model For Simultaneous Range-Bearing Estimation in LFMCW RadarneerajNo ratings yet
- 5005 SCDocument6 pages5005 SCneerajNo ratings yet
- Wang 2007Document5 pagesWang 2007SurangaGNo ratings yet
- Mutual Interference Mitigation For Automotive Radar SystemsDocument6 pagesMutual Interference Mitigation For Automotive Radar SystemsBulijiojioNo ratings yet
- A Target Detection Scheme With Decreased Complexity and Enhanced Performance For Range-Doppler FMCW RadarDocument13 pagesA Target Detection Scheme With Decreased Complexity and Enhanced Performance For Range-Doppler FMCW RadarPAULO CÉSAR RIBEIRO MARCIANONo ratings yet
- Wavelet Transform Approach To Distance: Protection of Transmission LinesDocument6 pagesWavelet Transform Approach To Distance: Protection of Transmission LinesthavaselvanNo ratings yet
- 9 Ieee Conf Soa 2015Document7 pages9 Ieee Conf Soa 2015Lokanath TripathyNo ratings yet
- Cramer Rao Bound Target Localization MIMO RadarDocument6 pagesCramer Rao Bound Target Localization MIMO Radarprobability2No ratings yet
- Mechanical Systems and Signal Processing: Yuh-Tay SheenDocument10 pagesMechanical Systems and Signal Processing: Yuh-Tay Sheendado djanatiNo ratings yet
- Real Time Implementation of FMCW Radar FDocument5 pagesReal Time Implementation of FMCW Radar FAfaq Ahmed Shaikh100% (1)
- Ads TWR Rev2Document4 pagesAds TWR Rev2Ioan DomutaNo ratings yet
- Is The Horizontal Component of The Velocity Perpendicular To The AntennaDocument2 pagesIs The Horizontal Component of The Velocity Perpendicular To The Antennaanjali9myneniNo ratings yet
- RF 000124Document6 pagesRF 000124BodoShowNo ratings yet
- Wideband Transmit Beamforming Using Integer-Time-Delayed and Phase-Shifted WaveformsDocument2 pagesWideband Transmit Beamforming Using Integer-Time-Delayed and Phase-Shifted Waveformsيسرى بوشوشةNo ratings yet
- PDFDocument4 pagesPDFHari ReddyNo ratings yet
- Chap 3Document9 pagesChap 3AnielaNo ratings yet
- Collimated Beam FMCW Radar For Vital Sign Patient MonitoringDocument8 pagesCollimated Beam FMCW Radar For Vital Sign Patient Monitoringsoham lakhoteNo ratings yet
- Fault Location Technique for Six-Phase Lines Using Wavelet TransformsDocument5 pagesFault Location Technique for Six-Phase Lines Using Wavelet TransformsnakkasrinuNo ratings yet
- Modeling UWB Channels and Their ProblemsDocument6 pagesModeling UWB Channels and Their ProblemsVirang PatelNo ratings yet
- A New Method of Multi-Target Detection For FMCW Automotive RadarDocument4 pagesA New Method of Multi-Target Detection For FMCW Automotive RadarDivine Grace BurmalNo ratings yet
- Mass Unbalance Analysis FFT An Lissajous DiagramDocument6 pagesMass Unbalance Analysis FFT An Lissajous DiagramJuan Angel Martinez RamirezNo ratings yet
- Through-Wall Target Localization with Time Reversal MUSIC MethodDocument15 pagesThrough-Wall Target Localization with Time Reversal MUSIC MethodBill WhiteNo ratings yet
- Part I-Radar: Continuous Wave RadarsDocument25 pagesPart I-Radar: Continuous Wave RadarsdangkitaNo ratings yet
- Guan 1989Document4 pagesGuan 1989dagottmannNo ratings yet
- 3-Low-Complexity Joint Range and Doppler FMCW Radar Algorithm Based On Number of TargetsDocument14 pages3-Low-Complexity Joint Range and Doppler FMCW Radar Algorithm Based On Number of TargetsPAULO CÉSAR RIBEIRO MARCIANONo ratings yet
- Polar Moment of Inertia ExperimentDocument17 pagesPolar Moment of Inertia Experimentsohail parachaNo ratings yet
- Application of Wavelets To Gearbox Vibration Signa 1996 Journal of Sound andDocument13 pagesApplication of Wavelets To Gearbox Vibration Signa 1996 Journal of Sound and1AdityaPathania1No ratings yet
- Tdfo FDA RCVRDocument7 pagesTdfo FDA RCVRWaseem KhanNo ratings yet
- Phase of Arrival Ranging Method For UHF RFID Tags Using Instantaneous Frequency MeasurementDocument4 pagesPhase of Arrival Ranging Method For UHF RFID Tags Using Instantaneous Frequency MeasurementShanaka JayasekaraNo ratings yet
- A New Approach To Transient Processing in The Phase Vocoder: IRCAM, Analysis-Synthesis Team, FranceDocument6 pagesA New Approach To Transient Processing in The Phase Vocoder: IRCAM, Analysis-Synthesis Team, FranceJamesNo ratings yet
- Journal of the Chinese Institute of Engineers Deception Jammer RejectionDocument7 pagesJournal of the Chinese Institute of Engineers Deception Jammer RejectionAhmed HussainNo ratings yet
- Space Vector PWM - 2Document6 pagesSpace Vector PWM - 2guanitouNo ratings yet
- Gardner Cyclic Feature DetectorsDocument11 pagesGardner Cyclic Feature Detectorsuranub2787No ratings yet
- Wavelet Transform AnalysisDocument14 pagesWavelet Transform AnalysisMadeline CurryNo ratings yet
- RLV Terminal Area EnergyDocument5 pagesRLV Terminal Area EnergyShubham KaduNo ratings yet
- A Method of Range Measurement Based On High Resolution Range ProfileDocument4 pagesA Method of Range Measurement Based On High Resolution Range ProfilehosseinNo ratings yet
- Addison 2006Document15 pagesAddison 2006Trọng DuNo ratings yet
- Lecture 6Document13 pagesLecture 6Hari Manoj Ram GandrothuNo ratings yet
- Signal Processing and Correlation Techniques: PreambleDocument15 pagesSignal Processing and Correlation Techniques: PreamblejuboraNo ratings yet
- A Robust Baud Rate Estimator For Noncooperative Demodulation PDFDocument5 pagesA Robust Baud Rate Estimator For Noncooperative Demodulation PDFSorin GoldenbergNo ratings yet
- Complex Variational Mode Decomposition For Signal ProcessingDocument11 pagesComplex Variational Mode Decomposition For Signal Processing0902au11mt14No ratings yet
- A Rayleigh Doppler Frequency Estimator Derived From Maximum Likelihood TheoryDocument5 pagesA Rayleigh Doppler Frequency Estimator Derived From Maximum Likelihood Theorydanny12212No ratings yet
- Program For The Detection and Diagnosis of Broken Rotor Bars in Squirrel-Cage MotorsDocument6 pagesProgram For The Detection and Diagnosis of Broken Rotor Bars in Squirrel-Cage MotorsLeo ArguijoNo ratings yet
- TF MTI Barbarossa FarinaDocument9 pagesTF MTI Barbarossa FarinaAsnarf EbraNo ratings yet
- Radar Questions & AnswersDocument13 pagesRadar Questions & AnswersNuzhath FathimaNo ratings yet
- FinalPaper IGTC 2015 No131Document10 pagesFinalPaper IGTC 2015 No131Asim HafizovicNo ratings yet
- Frequency-Modulated Continuous-Wave RadarDocument4 pagesFrequency-Modulated Continuous-Wave RadarMegha BadadNo ratings yet
- MP MSG Set 183 13Document14 pagesMP MSG Set 183 13gm4984371No ratings yet
- Doppler Spread Estimation in Mobile Communication SystemsDocument5 pagesDoppler Spread Estimation in Mobile Communication Systems82416149No ratings yet
- Digital Signal Processing: Carlos Mateo, Juan Antonio TalaveraDocument9 pagesDigital Signal Processing: Carlos Mateo, Juan Antonio TalaveraRobert MujaNo ratings yet
- Automotive FMCW Radar Interference Detection and SuppressionDocument5 pagesAutomotive FMCW Radar Interference Detection and SuppressionAbderrahimNo ratings yet
- Na EjusDocument11 pagesNa EjusRobert MujaNo ratings yet
- Mitigation of Automotive Radar Interference: Abstract-This Paper Presents A New Approach To MitiDocument6 pagesMitigation of Automotive Radar Interference: Abstract-This Paper Presents A New Approach To MitiRobert MujaNo ratings yet
- Mitigation of Automotive Radar Interference: Abstract-This Paper Presents A New Approach To MitiDocument6 pagesMitigation of Automotive Radar Interference: Abstract-This Paper Presents A New Approach To MitiRobert MujaNo ratings yet
- Ex Solution PulseDocument3 pagesEx Solution PulsedebealNo ratings yet
- DCN TrainingDocument52 pagesDCN TrainingkarthiveeraNo ratings yet
- Industrial 4G LTE Cellular Wireless Gateway With 5-Port 10/100/1000TDocument7 pagesIndustrial 4G LTE Cellular Wireless Gateway With 5-Port 10/100/1000Tfelipee20No ratings yet
- Fire Security ProductsDocument3 pagesFire Security ProductsvvvvmvaNo ratings yet
- Audio Frequency Track CircuitDocument38 pagesAudio Frequency Track Circuitnikhom_dk1565No ratings yet
- SRD 1673DDocument2 pagesSRD 1673DPardeep RajanNo ratings yet
- 15 Mbmf-65-18dde-In PDFDocument3 pages15 Mbmf-65-18dde-In PDFРоманКочневNo ratings yet
- Fluke 187 - 189 Manual de CalibracionDocument38 pagesFluke 187 - 189 Manual de Calibracionflavio torresNo ratings yet
- Fiber-Optic Transmission Training System Module-to-Module TransmissionDocument3 pagesFiber-Optic Transmission Training System Module-to-Module TransmissionXiao XiNo ratings yet
- Digital Signal Processing 2 Sample Midterm Exam: Problem 1: (20 %) Given TheDocument2 pagesDigital Signal Processing 2 Sample Midterm Exam: Problem 1: (20 %) Given TheAn H. TranNo ratings yet
- 3728lxff PDFDocument38 pages3728lxff PDFMaria Aleici JerezNo ratings yet
- KBP200 - KBP210: Silicon Bridge RectifiersDocument3 pagesKBP200 - KBP210: Silicon Bridge RectifiersSamson StyleNo ratings yet
- Cpu-95 Oi-E 4-08Document47 pagesCpu-95 Oi-E 4-08hisham falousNo ratings yet
- Harq ArqDocument12 pagesHarq ArqHemanth Kumar SontiNo ratings yet
- EGI Sound Sys. Cut SheetsDocument23 pagesEGI Sound Sys. Cut SheetsDox TahapsemNo ratings yet
- IdT CiscoDocument55 pagesIdT CiscojorgeludenavNo ratings yet
- 7960 PscadDocument2 pages7960 Pscadalike85No ratings yet
- SSD Buying Guide - List July 21, 2020Document19 pagesSSD Buying Guide - List July 21, 2020MJ ServaNo ratings yet
- Experiment 5: Simple Resistor Circuits: A B C DDocument4 pagesExperiment 5: Simple Resistor Circuits: A B C DTofik MohammedNo ratings yet
- Comparing the MS-N1004-UC and MS-N1008-UC Network Video RecordersDocument3 pagesComparing the MS-N1004-UC and MS-N1008-UC Network Video RecordersAlexis F Hernández BNo ratings yet
- nrf5340 Audio DK PB v1 0-3073590Document3 pagesnrf5340 Audio DK PB v1 0-3073590deusinNo ratings yet
- MPG z490 Gaming PlusDocument1 pageMPG z490 Gaming PlusSofi StenicoNo ratings yet
- Key Telephone System and PABXDocument18 pagesKey Telephone System and PABXVindya ImbulpitiyaNo ratings yet
- IR Communications Using A UART: Dominik TewieleDocument1 pageIR Communications Using A UART: Dominik TewieleAg CristianNo ratings yet
- Acer A515-56 - FH4AT - LA-K091PDocument102 pagesAcer A515-56 - FH4AT - LA-K091PDude JonesNo ratings yet
- Sicam Sat 1703 Acp Rtu PDFDocument12 pagesSicam Sat 1703 Acp Rtu PDFRICARDONo ratings yet
- HCNA-UC-IHUCA V2.8 Training Material (20160201)Document804 pagesHCNA-UC-IHUCA V2.8 Training Material (20160201)isamadinNo ratings yet
- IV I Mech Mems (Open Elective-R13)Document2 pagesIV I Mech Mems (Open Elective-R13)Aboobakker SidhiqueNo ratings yet
- Yeacommoutdoor4GCPEYF P11usermanualDocument2 pagesYeacommoutdoor4GCPEYF P11usermanualMario MorenoNo ratings yet
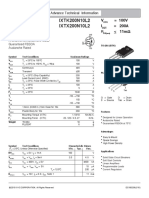
- Littelfuse Discrete MOSFETs N-Channel Linear IXT 200N10 Datasheet PDFDocument6 pagesLittelfuse Discrete MOSFETs N-Channel Linear IXT 200N10 Datasheet PDFRace Automotive ElectronicsNo ratings yet
- The Weather Machine: A Journey Inside the ForecastFrom EverandThe Weather Machine: A Journey Inside the ForecastRating: 3.5 out of 5 stars3.5/5 (31)
- Hero Found: The Greatest POW Escape of the Vietnam WarFrom EverandHero Found: The Greatest POW Escape of the Vietnam WarRating: 4 out of 5 stars4/5 (19)
- Sully: The Untold Story Behind the Miracle on the HudsonFrom EverandSully: The Untold Story Behind the Miracle on the HudsonRating: 4 out of 5 stars4/5 (103)
- The Fabric of Civilization: How Textiles Made the WorldFrom EverandThe Fabric of Civilization: How Textiles Made the WorldRating: 4.5 out of 5 stars4.5/5 (57)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestFrom EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestRating: 4 out of 5 stars4/5 (28)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaFrom EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNo ratings yet
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseFrom EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseRating: 4.5 out of 5 stars4.5/5 (51)
- Transformed: Moving to the Product Operating ModelFrom EverandTransformed: Moving to the Product Operating ModelRating: 4 out of 5 stars4/5 (1)
- The End of Craving: Recovering the Lost Wisdom of Eating WellFrom EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellRating: 4.5 out of 5 stars4.5/5 (80)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- The Quiet Zone: Unraveling the Mystery of a Town Suspended in SilenceFrom EverandThe Quiet Zone: Unraveling the Mystery of a Town Suspended in SilenceRating: 3.5 out of 5 stars3.5/5 (23)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyFrom EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNo ratings yet
- A Place of My Own: The Architecture of DaydreamsFrom EverandA Place of My Own: The Architecture of DaydreamsRating: 4 out of 5 stars4/5 (241)
- Recording Unhinged: Creative and Unconventional Music Recording TechniquesFrom EverandRecording Unhinged: Creative and Unconventional Music Recording TechniquesNo ratings yet
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationFrom EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationRating: 4.5 out of 5 stars4.5/5 (46)
- Pale Blue Dot: A Vision of the Human Future in SpaceFrom EverandPale Blue Dot: A Vision of the Human Future in SpaceRating: 4.5 out of 5 stars4.5/5 (587)
- 35 Miles From Shore: The Ditching and Rescue of ALM Flight 980From Everand35 Miles From Shore: The Ditching and Rescue of ALM Flight 980Rating: 4 out of 5 stars4/5 (21)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseFrom EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseRating: 3.5 out of 5 stars3.5/5 (12)
- The Path Between the Seas: The Creation of the Panama Canal, 1870-1914From EverandThe Path Between the Seas: The Creation of the Panama Canal, 1870-1914Rating: 4.5 out of 5 stars4.5/5 (124)
- Reality+: Virtual Worlds and the Problems of PhilosophyFrom EverandReality+: Virtual Worlds and the Problems of PhilosophyRating: 4 out of 5 stars4/5 (24)
- The Future of Geography: How the Competition in Space Will Change Our WorldFrom EverandThe Future of Geography: How the Competition in Space Will Change Our WorldRating: 4.5 out of 5 stars4.5/5 (4)
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreFrom EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreRating: 4.5 out of 5 stars4.5/5 (33)
- Smart Phone Dumb Phone: Free Yourself from Digital AddictionFrom EverandSmart Phone Dumb Phone: Free Yourself from Digital AddictionRating: 5 out of 5 stars5/5 (11)