You might also like
- Theoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlFrom EverandTheoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlNo ratings yet
- Target Geo-Localization Based On Camera Vision Simulation of UAVDocument11 pagesTarget Geo-Localization Based On Camera Vision Simulation of UAVJNo ratings yet
- Unmanned Aerial Systems: Theoretical Foundation and ApplicationsFrom EverandUnmanned Aerial Systems: Theoretical Foundation and ApplicationsNo ratings yet
- Zhou Vision-Based Online Localization and Trajectory Smoothing For Fixed-Wing UAV Tracking ICCVW 2019 PaperDocument8 pagesZhou Vision-Based Online Localization and Trajectory Smoothing For Fixed-Wing UAV Tracking ICCVW 2019 PaperjusticembamNo ratings yet
- Kothari 2017Document8 pagesKothari 2017NikitaNo ratings yet
- Isprsarchives XL 2 W2 93 2013Document6 pagesIsprsarchives XL 2 W2 93 2013hamdi muhumedNo ratings yet
- (A9) Outdoor Autonomous Landing On A Moving Platform For Quadrotors Using An Omnidirecional Camera PDFDocument10 pages(A9) Outdoor Autonomous Landing On A Moving Platform For Quadrotors Using An Omnidirecional Camera PDFGiovanni GozziniNo ratings yet
- Paper Weinmann Et Al Final VersionDocument8 pagesPaper Weinmann Et Al Final Version7hcpht5scbNo ratings yet
- Integrated Position Estimation Using Aerial Image SequencesDocument18 pagesIntegrated Position Estimation Using Aerial Image Sequencesqwerrty1029384756No ratings yet
- Discrete and Continuous Dynamical Systems Series S Volume 12, Number 4&5, August & September 2019Document14 pagesDiscrete and Continuous Dynamical Systems Series S Volume 12, Number 4&5, August & September 2019Tushar KumarNo ratings yet
- Quadcopter With Camera Visual Tracking: March 2015Document3 pagesQuadcopter With Camera Visual Tracking: March 2015Yovi Herlin SaputraNo ratings yet
- Multi-Camera Calibration Method Based On Minimizing The Difference of Reprojection Error VectorsDocument10 pagesMulti-Camera Calibration Method Based On Minimizing The Difference of Reprojection Error VectorsRiyaan BakhdaNo ratings yet
- A Hybrid Localization Approach For Uav WITH INSTALLED MAPDocument6 pagesA Hybrid Localization Approach For Uav WITH INSTALLED MAPMy trickNo ratings yet
- Vision-Based Localization and Mapping For An Autonomous MowerDocument8 pagesVision-Based Localization and Mapping For An Autonomous Mower柯秉宏No ratings yet
- Optical Detection Methods For Laser Guided Unmanned DevicesDocument9 pagesOptical Detection Methods For Laser Guided Unmanned DevicesChandra LohithNo ratings yet
- Sensors 18 02655Document14 pagesSensors 18 02655jhoNo ratings yet
- Whispers2018 Pix4d TargetlessDocument4 pagesWhispers2018 Pix4d TargetlesschristianbazanNo ratings yet
- ICUAS14 Kendall Salvapantula StolDocument8 pagesICUAS14 Kendall Salvapantula StolSomefun OluwasegunNo ratings yet
- Optical Flow Paper181finalDocument7 pagesOptical Flow Paper181finaljohndenningsNo ratings yet
- Vision Based MavDocument8 pagesVision Based MavJeanchristophe1996No ratings yet
- An Improved Rotation Invariant CNN-based Detector With Rotatable Bounding Boxes For Aerial Image DetectionDocument5 pagesAn Improved Rotation Invariant CNN-based Detector With Rotatable Bounding Boxes For Aerial Image DetectionHamzahNo ratings yet
- Vision-Based Unmanned Aerial Vehicle Detection and Tracking For Sense and Avoid SystemsDocument6 pagesVision-Based Unmanned Aerial Vehicle Detection and Tracking For Sense and Avoid SystemsKaran ShettyNo ratings yet
- Qualitative Vision-Based Path Following: Zhichao Chen and Stanley T. Birchfield, Senior Member, IEEEDocument6 pagesQualitative Vision-Based Path Following: Zhichao Chen and Stanley T. Birchfield, Senior Member, IEEEJulierme SilvaNo ratings yet
- Visual-Inertial SLAM For A Small Helicopter in Large Outdoor EnvironmentsDocument2 pagesVisual-Inertial SLAM For A Small Helicopter in Large Outdoor EnvironmentsAlexandreSidantNo ratings yet
- CongressoNovaZelandia ICST 2015 WanessaDocument6 pagesCongressoNovaZelandia ICST 2015 WanessaWanessa da SilvaNo ratings yet
- Camera Calibration From A Single Night Sky ImageDocument7 pagesCamera Calibration From A Single Night Sky ImageZikang XieNo ratings yet
- Synthetic Aperture Radar Principles and Applications of AI in Automatic Target RecognitionDocument6 pagesSynthetic Aperture Radar Principles and Applications of AI in Automatic Target RecognitionoveiskntuNo ratings yet
- Templeton Icra07Document8 pagesTempleton Icra07adilsondissoNo ratings yet
- Visual Features For Vehicle Localization and Ego-Motion EstimationDocument7 pagesVisual Features For Vehicle Localization and Ego-Motion EstimationassdNo ratings yet
- Homography-Based Visual Servo Tracking Control of A Wheeled Mobile RobotDocument6 pagesHomography-Based Visual Servo Tracking Control of A Wheeled Mobile RobotthrithunNo ratings yet
- Research ArticleDocument18 pagesResearch ArticleZhongyuan ChenNo ratings yet
- Calibración CámaraDocument7 pagesCalibración CámaraErick Poumián PalomecNo ratings yet
- Jose Luis Guzman, and Roland Siegwart : Ramon Gonzalez, Francisco Rodriguez Cedric PradalierDocument14 pagesJose Luis Guzman, and Roland Siegwart : Ramon Gonzalez, Francisco Rodriguez Cedric PradalierSaimoon QuaziNo ratings yet
- Body Guided Camera CalibrationDocument6 pagesBody Guided Camera CalibrationEanesNo ratings yet
- Accurate Indoor Mapping Using An Autonomous Unmanned Aerial Vehicle (UAV)Document8 pagesAccurate Indoor Mapping Using An Autonomous Unmanned Aerial Vehicle (UAV)Andy FloresNo ratings yet
- Holographic Near-Field Microwave Imaging With Antenna Arrays in A Cylindrical SetupDocument13 pagesHolographic Near-Field Microwave Imaging With Antenna Arrays in A Cylindrical Setuppravin maliNo ratings yet
- Detecting and Tracking Moving Objects For Video SurveillanceDocument7 pagesDetecting and Tracking Moving Objects For Video Surveillancevinay_2211No ratings yet
- Visual-Inertial Fusion For Indoor Autonomous Navigation of A Quadrotor Using ORB-SLAMDocument6 pagesVisual-Inertial Fusion For Indoor Autonomous Navigation of A Quadrotor Using ORB-SLAMAdeeba AliNo ratings yet
- A Camera Calibration Method For Obstacle Distance Measurement Based On Monocular VisionDocument4 pagesA Camera Calibration Method For Obstacle Distance Measurement Based On Monocular VisionAvinash KumarNo ratings yet
- Digital Camera Calibration Using Images Taken FromDocument5 pagesDigital Camera Calibration Using Images Taken Fromjokosambung jokoNo ratings yet
- Autonomous Flight and Obstacle Avoidance of A Quadrotor by Monocular SLAMDocument6 pagesAutonomous Flight and Obstacle Avoidance of A Quadrotor by Monocular SLAMAdeeba AliNo ratings yet
- IJCSESDocument27 pagesIJCSESijcsesNo ratings yet
- Vision-Based Autonomous Navigation and Landing of An Unmanned Aerial Vehicle Using Natural LandmarksDocument6 pagesVision-Based Autonomous Navigation and Landing of An Unmanned Aerial Vehicle Using Natural LandmarksPrabhakar VarakalaNo ratings yet
- Fork Agv: Estimation of Combined Magnetic Sensor With Vision Guide Applied On Automatic Mobile Transporter For Navigation and Accurate PositioningDocument7 pagesFork Agv: Estimation of Combined Magnetic Sensor With Vision Guide Applied On Automatic Mobile Transporter For Navigation and Accurate PositioningnasyirtamaraNo ratings yet
- Visible Surface DetectionDocument13 pagesVisible Surface DetectionShaurya KapoorNo ratings yet
- Single Landmark Distance-Based NavigationDocument8 pagesSingle Landmark Distance-Based NavigationAdeeba AliNo ratings yet
- Yolov5 Based Visual Localization For Autonomous Vehicles: Wided Souidene Mseddi Mohamed Ali Sedrine Rabah AttiaDocument5 pagesYolov5 Based Visual Localization For Autonomous Vehicles: Wided Souidene Mseddi Mohamed Ali Sedrine Rabah AttiaEd swertNo ratings yet
- Remotesensing 14 05063 v2Document25 pagesRemotesensing 14 05063 v2Yasmine GhazlaneNo ratings yet
- Electronics 09 00448 v2Document15 pagesElectronics 09 00448 v2GiovaniAricettiNo ratings yet
- Active Monocular LocalizationTowards Autonomous Monocular Exploration For Multirotor MAVsDocument8 pagesActive Monocular LocalizationTowards Autonomous Monocular Exploration For Multirotor MAVsxiaosunliangNo ratings yet
- Schumann 2017Document6 pagesSchumann 2017XxgametrollerxXNo ratings yet
- FLC Revised 1Document20 pagesFLC Revised 1Gál Károly-IstvánNo ratings yet
- Rotation-Invariant Infrared Aerial Target Identification Based On SRCDocument9 pagesRotation-Invariant Infrared Aerial Target Identification Based On SRCapplebao1022No ratings yet
- Aerospace: Aerial Target Tracking Algorithm Based On Faster R-CNN Combined With Frame DifferencingDocument17 pagesAerospace: Aerial Target Tracking Algorithm Based On Faster R-CNN Combined With Frame Differencingmeomuncute1988No ratings yet
- Indoor Navigation With A Swarm of Flying RobotsDocument7 pagesIndoor Navigation With A Swarm of Flying RobotsAnonymous ITnkbIEFNo ratings yet
- Vision AbsLocalization UAV 2014Document6 pagesVision AbsLocalization UAV 2014qwerrty1029384756No ratings yet
- Sensors: Pose Estimation of A Mobile Robot Based On Fusion of IMU Data and Vision Data Using An Extended Kalman FilterDocument22 pagesSensors: Pose Estimation of A Mobile Robot Based On Fusion of IMU Data and Vision Data Using An Extended Kalman Filterxyz shahNo ratings yet
- A Comparison of Lidar-Based Slam Systems For Control of Unmanned Aerial VehiclesDocument7 pagesA Comparison of Lidar-Based Slam Systems For Control of Unmanned Aerial VehiclesMetehan DoğanNo ratings yet
- 6.an AUV Vision System For Target Detection and Precise PositioningDocument8 pages6.an AUV Vision System For Target Detection and Precise PositioningMilton AlvaradoNo ratings yet
- Visual Tracking and Control of A Quadcopter Using PDFDocument8 pagesVisual Tracking and Control of A Quadcopter Using PDFYovi Herlin SaputraNo ratings yet
- Ap - Snagov - NR - 2B - Table - Cheltuieli - BL - Nr. 2 - SC - 2B - Feb - 2022Document1 pageAp - Snagov - NR - 2B - Table - Cheltuieli - BL - Nr. 2 - SC - 2B - Feb - 2022RazvanHaragNo ratings yet
- HOTAS InternetDocument2 pagesHOTAS InternetRazvanHaragNo ratings yet
- DASH InternetDocument9 pagesDASH InternetRazvanHaragNo ratings yet
- Multiple Target Detection and Tracking in A Multiple Camera NetworkDocument59 pagesMultiple Target Detection and Tracking in A Multiple Camera NetworkRazvanHaragNo ratings yet
- Real-Time Obstacle Detection and Tracking For Sense-And-Avoid Mechanism in UavsDocument13 pagesReal-Time Obstacle Detection and Tracking For Sense-And-Avoid Mechanism in UavsRazvanHaragNo ratings yet
- Human Motion Detection and Video Surveillance Using MATLAB: Sapana K. Mishra, Kanchan .S BhagatDocument4 pagesHuman Motion Detection and Video Surveillance Using MATLAB: Sapana K. Mishra, Kanchan .S BhagatRazvanHaragNo ratings yet
- Standard Sudoku 1-2: 1 PointDocument9 pagesStandard Sudoku 1-2: 1 PointRazvanHaragNo ratings yet
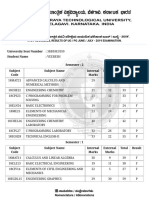
- VTU Result PDFDocument2 pagesVTU Result PDFVaibhavNo ratings yet
- Asymetry Analysis of Breast Thermograma Using Automated SegmentationDocument8 pagesAsymetry Analysis of Breast Thermograma Using Automated Segmentationazazel17No ratings yet
- Pplied Hysics-Ii: Vayu Education of IndiaDocument16 pagesPplied Hysics-Ii: Vayu Education of Indiagharib mahmoudNo ratings yet
- Reading8 PilkingtonDocument8 pagesReading8 Pilkingtonab_amyNo ratings yet
- Teruhisa Morishige: Mazda Engineering StandardDocument9 pagesTeruhisa Morishige: Mazda Engineering Standardmohammad yazdanpanahNo ratings yet
- WaveDocument1 pageWavejimbieNo ratings yet
- Rule 107Document8 pagesRule 107AlexNo ratings yet
- He Didnt Die in Vain - Take No GloryDocument2 pagesHe Didnt Die in Vain - Take No GloryDagaerag Law OfficeNo ratings yet
- Persephone by Julia Donaldson: (A Meadow. Enters Persephone, Picking The Petals of A Daisy.)Document10 pagesPersephone by Julia Donaldson: (A Meadow. Enters Persephone, Picking The Petals of A Daisy.)Dobler Liliana100% (1)
- Jataka Tales - The Crane and The CrabDocument5 pagesJataka Tales - The Crane and The Crabshahrajan2k1No ratings yet
- EC SF Presentation 02Document10 pagesEC SF Presentation 02Ahmed NafeaNo ratings yet
- Art 3-6BDocument146 pagesArt 3-6BCJNo ratings yet
- Theoretical Foundations of NursingDocument22 pagesTheoretical Foundations of Nursingattilaabiidn100% (3)
- Hinog vs. MellicorDocument11 pagesHinog vs. MellicorGreta VilarNo ratings yet
- The Endless Pursuit of Truth: Subalternity and Marginalization in Post-Neorealist Italian FilmDocument206 pagesThe Endless Pursuit of Truth: Subalternity and Marginalization in Post-Neorealist Italian FilmPaul MathewNo ratings yet
- Seventh Day Adventist Quiz by KnowingTheTimeDocument4 pagesSeventh Day Adventist Quiz by KnowingTheTimeMiiiTheart100% (3)
- List of Festivals in India - WikipediaDocument13 pagesList of Festivals in India - WikipediaRashmi RaviNo ratings yet
- Magtajas vs. PryceDocument3 pagesMagtajas vs. PryceRoyce PedemonteNo ratings yet
- Physics Waves MCQDocument6 pagesPhysics Waves MCQAyan GhoshNo ratings yet
- Capital Structure: Meaning and Theories Presented by Namrata Deb 1 PGDBMDocument20 pagesCapital Structure: Meaning and Theories Presented by Namrata Deb 1 PGDBMDhiraj SharmaNo ratings yet
- Cluster University of Jammu: Title: English Anthology and GrammarDocument2 pagesCluster University of Jammu: Title: English Anthology and GrammarDÁRK GAMINGNo ratings yet
- Doloran Auxilliary PrayersDocument4 pagesDoloran Auxilliary PrayersJosh A.No ratings yet
- Philippine Psychometricians Licensure Exam RevieweDocument1 pagePhilippine Psychometricians Licensure Exam RevieweKristelle Mae C. Azucenas0% (1)
- Dcat2014 - Simulated Set B - Section 3 - Reading Comprehension - Final v.4.7.2014Document6 pagesDcat2014 - Simulated Set B - Section 3 - Reading Comprehension - Final v.4.7.2014Joice BobosNo ratings yet
- 001 Ipack My School BagDocument38 pages001 Ipack My School BagBrock JohnsonNo ratings yet
- SAP Workflow Scenario: Maintenance Notification ApprovalDocument6 pagesSAP Workflow Scenario: Maintenance Notification ApprovalPiyush BoseNo ratings yet
- CH 2 & CH 3 John R. Schermerhorn - Management-Wiley (2020)Document9 pagesCH 2 & CH 3 John R. Schermerhorn - Management-Wiley (2020)Muhammad Fariz IbrahimNo ratings yet
- India Internet Goldman SachsDocument86 pagesIndia Internet Goldman SachsTaranjeet SinghNo ratings yet
- EAM Appendices ICARDocument914 pagesEAM Appendices ICARsumankumarm869833No ratings yet
- Monograph SeismicSafetyDocument63 pagesMonograph SeismicSafetyAlket DhamiNo ratings yet
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (228)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsFrom EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsRating: 5 out of 5 stars5/5 (3)
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)From EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Rating: 5 out of 5 stars5/5 (2)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]From EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Rating: 5 out of 5 stars5/5 (3)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionFrom EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionRating: 5 out of 5 stars5/5 (2)
- Raspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideFrom EverandRaspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideNo ratings yet
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxFrom EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNo ratings yet
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XFrom EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XRating: 3 out of 5 stars3/5 (2)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)From EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Rating: 5 out of 5 stars5/5 (1)
- Arduino Sketches: Tools and Techniques for Programming WizardryFrom EverandArduino Sketches: Tools and Techniques for Programming WizardryRating: 4 out of 5 stars4/5 (1)
- Mastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFFrom EverandMastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFNo ratings yet
- Essential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XFrom EverandEssential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XRating: 5 out of 5 stars5/5 (1)
- Raspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesFrom EverandRaspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesNo ratings yet
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- Real-Time UML Workshop for Embedded SystemsFrom EverandReal-Time UML Workshop for Embedded SystemsRating: 3.5 out of 5 stars3.5/5 (2)