You might also like
- Module 14 - Final FilesDocument1,042 pagesModule 14 - Final FilesMinami KotoriNo ratings yet
- Roadmap: A2+ Students' Book Audio ScriptsDocument34 pagesRoadmap: A2+ Students' Book Audio Scriptsqwerrty1029384756No ratings yet
- Happier at Home by Gretchen Rubin - ExcerptDocument39 pagesHappier at Home by Gretchen Rubin - ExcerptCrown Publishing Group69% (16)
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- TSC RFP With Core - Page 130 PDFDocument130 pagesTSC RFP With Core - Page 130 PDFalbraa80100% (1)
- Optical Flow Paper181finalDocument7 pagesOptical Flow Paper181finaljohndenningsNo ratings yet
- INS-Camera Calibration Without Ground Control Points: Daniel Bender, Marek Schikora, J Urgen Sturm and Daniel CremersDocument6 pagesINS-Camera Calibration Without Ground Control Points: Daniel Bender, Marek Schikora, J Urgen Sturm and Daniel Cremersqwerrty1029384756No ratings yet
- Aerospace: Aerial Target Tracking Algorithm Based On Faster R-CNN Combined With Frame DifferencingDocument17 pagesAerospace: Aerial Target Tracking Algorithm Based On Faster R-CNN Combined With Frame Differencingmeomuncute1988No ratings yet
- Image Processing For Near Earth Object Optical Guidance SystemsDocument16 pagesImage Processing For Near Earth Object Optical Guidance SystemsNamith DevadigaNo ratings yet
- Templeton Icra07Document8 pagesTempleton Icra07adilsondissoNo ratings yet
- IJCSESDocument27 pagesIJCSESijcsesNo ratings yet
- Kothari 2017Document8 pagesKothari 2017NikitaNo ratings yet
- Visual Features For Vehicle Localization and Ego-Motion EstimationDocument7 pagesVisual Features For Vehicle Localization and Ego-Motion EstimationassdNo ratings yet
- Multicative Extended Kalman FilterDocument12 pagesMulticative Extended Kalman FilterHamza Kadiri AhziNo ratings yet
- Isprsarchives XL 2 W2 93 2013Document6 pagesIsprsarchives XL 2 W2 93 2013hamdi muhumedNo ratings yet
- A Hybrid Localization Approach For Uav WITH INSTALLED MAPDocument6 pagesA Hybrid Localization Approach For Uav WITH INSTALLED MAPMy trickNo ratings yet
- Autonomous Landing of An Unmanned Helicopter Based On Vision and Inertial SensingDocument11 pagesAutonomous Landing of An Unmanned Helicopter Based On Vision and Inertial SensingKarthik NiyanthaNo ratings yet
- Detecting and Tracking Moving Objects For Video SurveillanceDocument7 pagesDetecting and Tracking Moving Objects For Video Surveillancevinay_2211No ratings yet
- ECE Senior Capstone Project Strapdown INSDocument3 pagesECE Senior Capstone Project Strapdown INSaliNo ratings yet
- Heba ElKholy Thesis S2014Document13 pagesHeba ElKholy Thesis S2014AlexandraAndreeaNo ratings yet
- Nonlinear Observers Design For Vision-Aided Inertial Navigation SystemsDocument16 pagesNonlinear Observers Design For Vision-Aided Inertial Navigation SystemsShrija KarmakarNo ratings yet
- High Accuracy Active Stand-Off Target Geolocation Using UAV PlatformDocument4 pagesHigh Accuracy Active Stand-Off Target Geolocation Using UAV PlatformRazvanHaragNo ratings yet
- Jun 1999 277 PDFDocument8 pagesJun 1999 277 PDFbbscribedNo ratings yet
- Complementary Vision Based Data Fusion For Robust Positioning and Directed Flight of An Autonomous QuadrocopterDocument19 pagesComplementary Vision Based Data Fusion For Robust Positioning and Directed Flight of An Autonomous QuadrocopterAdam HansenNo ratings yet
- Deep Convolutional Neural Network-Based Autonomous Drone NavigationDocument8 pagesDeep Convolutional Neural Network-Based Autonomous Drone Navigationevasat111No ratings yet
- Visual-Inertial SLAM For A Small Helicopter in Large Outdoor EnvironmentsDocument2 pagesVisual-Inertial SLAM For A Small Helicopter in Large Outdoor EnvironmentsAlexandreSidantNo ratings yet
- Hyun Hak Cho 2013Document6 pagesHyun Hak Cho 2013huy.tranvugia1305No ratings yet
- Jamris Review Assignment 740 Article 909Document26 pagesJamris Review Assignment 740 Article 909ANH TUAN PHAMNo ratings yet
- Zhou Vision-Based Online Localization and Trajectory Smoothing For Fixed-Wing UAV Tracking ICCVW 2019 PaperDocument8 pagesZhou Vision-Based Online Localization and Trajectory Smoothing For Fixed-Wing UAV Tracking ICCVW 2019 PaperjusticembamNo ratings yet
- Precise Formation Flying Control of Mult PDFDocument15 pagesPrecise Formation Flying Control of Mult PDFAlvaroFernandezVillarNo ratings yet
- Paper Weinmann Et Al Final VersionDocument8 pagesPaper Weinmann Et Al Final Version7hcpht5scbNo ratings yet
- Accurate Indoor UAV Mapping Using SLAMDocument8 pagesAccurate Indoor UAV Mapping Using SLAMAndy FloresNo ratings yet
- Sensors 2016Document20 pagesSensors 2016Sergey SokolovNo ratings yet
- Modelling Issues in Vision Based Aircraft Navigation During LandingDocument8 pagesModelling Issues in Vision Based Aircraft Navigation During LandingR. AstridNo ratings yet
- Homography-Based Visual Servo Tracking Control of A Wheeled Mobile RobotDocument6 pagesHomography-Based Visual Servo Tracking Control of A Wheeled Mobile RobotthrithunNo ratings yet
- The Processing of Image Data Collected by Light UA PDFDocument4 pagesThe Processing of Image Data Collected by Light UA PDFvionaNo ratings yet
- Attitude Estimation PDFDocument9 pagesAttitude Estimation PDFbendisudhakar3536No ratings yet
- A Novel Algorithm For Estimating Vehicle Speed From Two Consecutive ImagesDocument6 pagesA Novel Algorithm For Estimating Vehicle Speed From Two Consecutive ImagessamiNo ratings yet
- Control and Navigation System For A Fixed-Wing Unmanned Aerial VehicleDocument11 pagesControl and Navigation System For A Fixed-Wing Unmanned Aerial VehicleAfif PradhanaNo ratings yet
- INS Alignment Process ExplainedDocument5 pagesINS Alignment Process ExplainedAhmed WasifNo ratings yet
- Tan Et Al 2006Document13 pagesTan Et Al 2006Aparupa DasguptaNo ratings yet
- A Vision-Based Method For Determining Aircraft State During Spin RecoveryDocument17 pagesA Vision-Based Method For Determining Aircraft State During Spin RecoveryJay GalangNo ratings yet
- Sensors: Visual-Inertial Odometry With Robust Initialization and Online Scale EstimationDocument21 pagesSensors: Visual-Inertial Odometry With Robust Initialization and Online Scale EstimationЄвген ВознюкNo ratings yet
- Visual Tracking and Control of a Quadcopter Using Stereo CameraDocument8 pagesVisual Tracking and Control of a Quadcopter Using Stereo CameraYovi Herlin SaputraNo ratings yet
- Low Cost GPS INS Sensor Fusion System For UAV NavigationDocument9 pagesLow Cost GPS INS Sensor Fusion System For UAV NavigationThaung Htut KhaungNo ratings yet
- UAV Aerial Survey Rapidly Maps Large AreasDocument5 pagesUAV Aerial Survey Rapidly Maps Large AreasSudung SitumorangNo ratings yet
- Real-Time Stereo Visual Servoing Control of An UAV Having Eight-RotorsDocument11 pagesReal-Time Stereo Visual Servoing Control of An UAV Having Eight-RotorsKarthi KeyanNo ratings yet
- Aerotriangulation - The Precise Determination of Ground CoordinatesDocument39 pagesAerotriangulation - The Precise Determination of Ground CoordinatesKamilla MesquitaNo ratings yet
- Feature-Based Aerial Image Registration and MosaicingDocument32 pagesFeature-Based Aerial Image Registration and Mosaicingmkd2000No ratings yet
- 2015 Autonomous Navigation of UAV in Foliage EnvironmentDocument19 pages2015 Autonomous Navigation of UAV in Foliage EnvironmentabredulebreNo ratings yet
- MethodDocument12 pagesMethodtuan.dangvuanh2603No ratings yet
- Paper 2 FinalDocument9 pagesPaper 2 FinalThien MaiNo ratings yet
- ICUAS14 Kendall Salvapantula StolDocument8 pagesICUAS14 Kendall Salvapantula StolSomefun OluwasegunNo ratings yet
- Vision-Based Localization and Mapping For An Autonomous MowerDocument8 pagesVision-Based Localization and Mapping For An Autonomous Mower柯秉宏No ratings yet
- Real-Time 6-DOF Monocular Visual SLAM Large EnvironmentsDocument8 pagesReal-Time 6-DOF Monocular Visual SLAM Large EnvironmentsAntonio C. KeithNo ratings yet
- 1 s2.0 S0888327018301043 MainDocument17 pages1 s2.0 S0888327018301043 MainSemih AteşNo ratings yet
- Developing of A Video-Based Model For UAV Autonomous NavigationDocument12 pagesDeveloping of A Video-Based Model For UAV Autonomous NavigationChrisnaj HuEkOЯnNo ratings yet
- Sensors: Pose Estimation of A Mobile Robot Based On Fusion of IMU Data and Vision Data Using An Extended Kalman FilterDocument22 pagesSensors: Pose Estimation of A Mobile Robot Based On Fusion of IMU Data and Vision Data Using An Extended Kalman Filterxyz shahNo ratings yet
- Efficient Visual Feedback Method To Control A Three-Dimensional Overhead CraneDocument11 pagesEfficient Visual Feedback Method To Control A Three-Dimensional Overhead CraneAlain PonceNo ratings yet
- Circumventing Dynamic Modeling Evaluation of The Error-State PDFDocument8 pagesCircumventing Dynamic Modeling Evaluation of The Error-State PDFvaseem akramNo ratings yet
- 1-s2.0-S1474667017331336-mainDocument6 pages1-s2.0-S1474667017331336-mainwaciy70505No ratings yet
- Vision-Based Autonomous Navigation and Landing of An Unmanned Aerial Vehicle Using Natural LandmarksDocument6 pagesVision-Based Autonomous Navigation and Landing of An Unmanned Aerial Vehicle Using Natural LandmarksPrabhakar VarakalaNo ratings yet
- IEEE Drone para Vuelo AutonomoDocument4 pagesIEEE Drone para Vuelo Autonomosault07No ratings yet
- Theoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlFrom EverandTheoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlNo ratings yet
- James Et Al-2017-Earth Surface Processes and LandformsDocument20 pagesJames Et Al-2017-Earth Surface Processes and Landformsqwerrty1029384756No ratings yet
- Bespoke Landmarks Improve Localisation 6x in All WeatherDocument8 pagesBespoke Landmarks Improve Localisation 6x in All Weatherqwerrty1029384756No ratings yet
- Adaptive and Generic Corner Detection Based On The Accelerated Segment TestDocument14 pagesAdaptive and Generic Corner Detection Based On The Accelerated Segment Testqwerrty1029384756No ratings yet
- Real-time Computer Vision with OpenCV: GPU Acceleration GuideDocument30 pagesReal-time Computer Vision with OpenCV: GPU Acceleration Guideqwerrty1029384756No ratings yet
- A Vision-Based Guidance System For UAV Navigation PDFDocument25 pagesA Vision-Based Guidance System For UAV Navigation PDFqwerrty1029384756No ratings yet
- A Vision-Based Guidance System For UAV Navigation PDFDocument25 pagesA Vision-Based Guidance System For UAV Navigation PDFqwerrty1029384756No ratings yet
- Vision AbsLocalization UAV 2014Document6 pagesVision AbsLocalization UAV 2014qwerrty1029384756No ratings yet
- Adaptive and Generic Corner Detection Based On The Accelerated Segment TestDocument14 pagesAdaptive and Generic Corner Detection Based On The Accelerated Segment Testqwerrty1029384756No ratings yet
- TBCDocument3 pagesTBCwenyinriantoNo ratings yet
- Getting Started-OMV5Document84 pagesGetting Started-OMV5qwerrty1029384756No ratings yet
- Felted Bowls Final 180311Document2 pagesFelted Bowls Final 180311qwerrty1029384756No ratings yet
- MOB200 - Going Digital: SAP Mobile Technology Strategy and RoadmapDocument41 pagesMOB200 - Going Digital: SAP Mobile Technology Strategy and RoadmapRaviNo ratings yet
- BS en 13035-9-2006 + A1-2010Document24 pagesBS en 13035-9-2006 + A1-2010DoicielNo ratings yet
- Eng 8 LP4Document3 pagesEng 8 LP4Fe JanduganNo ratings yet
- Manual of Establishment Sections 05ff58f7947ffb7 76283342Document271 pagesManual of Establishment Sections 05ff58f7947ffb7 76283342Vijaya KumariNo ratings yet
- Compendium 2004jan RadiographyDocument11 pagesCompendium 2004jan RadiographyAgus SusilaNo ratings yet
- Scope of WorkDocument4 pagesScope of WorkMathivanan AnbazhaganNo ratings yet
- Laser Light PriceDocument5 pagesLaser Light Priceluis palominoNo ratings yet
- 1.finite Impulse Response (FIR) FiltersDocument16 pages1.finite Impulse Response (FIR) FiltersSamet YılmazNo ratings yet
- Start Input System Data and Load Demand: From RA List by Listing All Recommended Ra and Their Combinations (NRA)Document1 pageStart Input System Data and Load Demand: From RA List by Listing All Recommended Ra and Their Combinations (NRA)Shoaib SamiNo ratings yet
- Human Persons Are Oriented Toward Their Impending DeathDocument40 pagesHuman Persons Are Oriented Toward Their Impending DeathNaddy Retxed100% (1)
- A Treatise On Physical GeographyDocument441 pagesA Treatise On Physical Geographyramosbrunoo8933No ratings yet
- UntitledDocument1 pageUntitledMoizur RahmanNo ratings yet
- DLL Catch Up Friday Grade 4 Jan 19Document7 pagesDLL Catch Up Friday Grade 4 Jan 19reyannmolinacruz21100% (30)
- International Emergency Nursing: Karen Hammad, Lingli Peng, Olga Anikeeva, Paul Arbon, Huiyun Du, Yinglan LiDocument5 pagesInternational Emergency Nursing: Karen Hammad, Lingli Peng, Olga Anikeeva, Paul Arbon, Huiyun Du, Yinglan LiRuly AryaNo ratings yet
- TH - TB Series (Helical GearBox Catalog)Document94 pagesTH - TB Series (Helical GearBox Catalog)poorianaNo ratings yet
- Revison 5 - Adverbs of TimeDocument50 pagesRevison 5 - Adverbs of Timeluis fernandoNo ratings yet
- Underplate GroutingDocument1 pageUnderplate GroutingminedataNo ratings yet
- Ibrahim Fibers Limited ReportDocument47 pagesIbrahim Fibers Limited ReportKhaqan Majeed100% (1)
- Atoms and MoleculesDocument4 pagesAtoms and MoleculesShwetaNo ratings yet
- ESDIS05161 DMP For DPs Template PDFDocument15 pagesESDIS05161 DMP For DPs Template PDFneerajshukla246829No ratings yet
- DNSDocument23 pagesDNSkalugareniNo ratings yet
- Fostering Innovation Through Experiential LearningDocument14 pagesFostering Innovation Through Experiential LearningAndrew TranNo ratings yet
- Quality Assurance AnalystDocument2 pagesQuality Assurance AnalystMalikNo ratings yet
- COMPUTER NETWORKS-3, Nitheesh.T, 21MIS0401Document23 pagesCOMPUTER NETWORKS-3, Nitheesh.T, 21MIS0401nitheeshNo ratings yet
- Castro DW 32Document3 pagesCastro DW 32Jeetu GosaiNo ratings yet
- Class Note 2 - Rain GaugesDocument6 pagesClass Note 2 - Rain GaugesPrakash PatelNo ratings yet
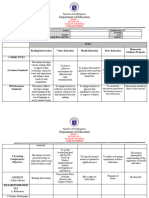
- Rubrics For Interd TaskDocument3 pagesRubrics For Interd Taskapi-265986384No ratings yet