You might also like
- Applsci 09 02105 PDFDocument17 pagesApplsci 09 02105 PDFSantiago Burbano EnriquezNo ratings yet
- Alcantarilla 10 I Cra 1Document6 pagesAlcantarilla 10 I Cra 1henrydclNo ratings yet
- Visual SLAM For Flying Vehicles: Bastian Steder Giorgio Grisetti Cyrill Stachniss Wolfram BurgardDocument5 pagesVisual SLAM For Flying Vehicles: Bastian Steder Giorgio Grisetti Cyrill Stachniss Wolfram BurgardAnjana AravindNo ratings yet
- Weiss 11 RealDocument7 pagesWeiss 11 RealVũ Tiến DũngNo ratings yet
- A Multi-State Constraint Kalman FilterDocument8 pagesA Multi-State Constraint Kalman Filteradeelakram03No ratings yet
- 3D Surveillance Coverage Using Maps Extracted by A Monocular SLAM AlgorithmDocument7 pages3D Surveillance Coverage Using Maps Extracted by A Monocular SLAM AlgorithmAlexandreSidantNo ratings yet
- Orb SlamDocument17 pagesOrb SlamRenato SanabriaNo ratings yet
- Tightly-Coupled Model Aided Visual-Inertial Fusion For Quadrotor Micro Air VehiclesDocument14 pagesTightly-Coupled Model Aided Visual-Inertial Fusion For Quadrotor Micro Air VehiclesbocailloNo ratings yet
- ORB-SLAM: A Versatile and Accurate Monocular SLAM SystemDocument17 pagesORB-SLAM: A Versatile and Accurate Monocular SLAM Systemdogukan duranNo ratings yet
- 3D Mapping and Navigation For Autonomous Quadrotor AircraftDocument6 pages3D Mapping and Navigation For Autonomous Quadrotor AircraftErvin DavilaNo ratings yet
- Real-Time Analysis of AthletesDocument11 pagesReal-Time Analysis of AthletesMaxwell Nunes do CarmoNo ratings yet
- Sensors: A Robust Approach For A Filter-Based Monocular Simultaneous Localization and Mapping (SLAM) SystemDocument22 pagesSensors: A Robust Approach For A Filter-Based Monocular Simultaneous Localization and Mapping (SLAM) Systemrf_munguiaNo ratings yet
- Castle Etal Ivc2010Document11 pagesCastle Etal Ivc2010Zsofia PopNo ratings yet
- Autonomous Flight and Obstacle Avoidance of A Quadrotor by Monocular SLAMDocument6 pagesAutonomous Flight and Obstacle Avoidance of A Quadrotor by Monocular SLAMAdeeba AliNo ratings yet
- Ptam PaperDocument10 pagesPtam PaperRyottNo ratings yet
- Real-Time 2D Mapping and Localization Algorithms For Mobile Robot ApplicationsDocument8 pagesReal-Time 2D Mapping and Localization Algorithms For Mobile Robot ApplicationsDavut Can AkbaşNo ratings yet
- Real Time TrackingDocument8 pagesReal Time Trackingmaacpie8353No ratings yet
- Multicative Extended Kalman FilterDocument12 pagesMulticative Extended Kalman FilterHamza Kadiri AhziNo ratings yet
- 6614 Ijma 01Document19 pages6614 Ijma 01IJMAJournalNo ratings yet
- 1I11-IJAET1111203 Novel 3dDocument12 pages1I11-IJAET1111203 Novel 3dIJAET JournalNo ratings yet
- Yolov5 Based Visual Localization For Autonomous Vehicles: Wided Souidene Mseddi Mohamed Ali Sedrine Rabah AttiaDocument5 pagesYolov5 Based Visual Localization For Autonomous Vehicles: Wided Souidene Mseddi Mohamed Ali Sedrine Rabah AttiaEd swertNo ratings yet
- Reconstructing Street-Scenes in Real-Time From A Driving CarDocument8 pagesReconstructing Street-Scenes in Real-Time From A Driving CarSan Lug OmaNo ratings yet
- Georefine: Self-Supervised Online Depth Refinement For Accurate Dense MappingDocument24 pagesGeorefine: Self-Supervised Online Depth Refinement For Accurate Dense MappingPengZai ZhongNo ratings yet
- Nav GPS DeniedDocument21 pagesNav GPS DeniedSri SaiNo ratings yet
- SVO: Semi-Direct Visual Odometry For Monocular and Multi-Camera SystemsDocument18 pagesSVO: Semi-Direct Visual Odometry For Monocular and Multi-Camera SystemsMike AlonsoNo ratings yet
- Jose Luis Guzman, and Roland Siegwart : Ramon Gonzalez, Francisco Rodriguez Cedric PradalierDocument14 pagesJose Luis Guzman, and Roland Siegwart : Ramon Gonzalez, Francisco Rodriguez Cedric PradalierSaimoon QuaziNo ratings yet
- Image Processing For Near Earth Object Optical Guidance SystemsDocument16 pagesImage Processing For Near Earth Object Optical Guidance SystemsNamith DevadigaNo ratings yet
- Vidal Etal Icra2006Document7 pagesVidal Etal Icra2006madupiz@gmailNo ratings yet
- Enabling Robust Visual Navigation: PHD Research ProposalDocument14 pagesEnabling Robust Visual Navigation: PHD Research ProposalshaheerdurraniNo ratings yet
- Scene Modelling, Recognition and Tracking With Invariant Image FeaturesDocument10 pagesScene Modelling, Recognition and Tracking With Invariant Image FeaturesMohamad GhafariNo ratings yet
- Sensors 22 08967 v2Document22 pagesSensors 22 08967 v2cursito laliNo ratings yet
- KleinMurray2007ISMAR PDFDocument10 pagesKleinMurray2007ISMAR PDFjoaofaroNo ratings yet
- Active Monocular LocalizationTowards Autonomous Monocular Exploration For Multirotor MAVsDocument8 pagesActive Monocular LocalizationTowards Autonomous Monocular Exploration For Multirotor MAVsxiaosunliangNo ratings yet
- Intelligent Mobility: Autonomous Outdoor Robotics at The DFKIDocument7 pagesIntelligent Mobility: Autonomous Outdoor Robotics at The DFKIFernando MartinezNo ratings yet
- Senzor de OrientareDocument6 pagesSenzor de OrientareOlidelaPoliNo ratings yet
- Sensors 17 01341 PDFDocument18 pagesSensors 17 01341 PDFAyakyusha AiNo ratings yet
- Robust and Fast Detection of Moving VehiclesDocument9 pagesRobust and Fast Detection of Moving VehiclesVeri VerdiansyahNo ratings yet
- (IJCST-V10I5P17) :DR K Sailaja, P Hari PrasadDocument7 pages(IJCST-V10I5P17) :DR K Sailaja, P Hari PrasadEighthSenseGroupNo ratings yet
- Lee Rgbd11 Visually ImpairedDocument6 pagesLee Rgbd11 Visually ImpairedFrancis DominicNo ratings yet
- Coslam: Collaborative Visual Slam in Dynamic Environments: Danping Zou and Ping Tan, Member, IeeeDocument13 pagesCoslam: Collaborative Visual Slam in Dynamic Environments: Danping Zou and Ping Tan, Member, IeeeVanshil ShahNo ratings yet
- IJCSESDocument27 pagesIJCSESijcsesNo ratings yet
- File 1667643029 110340 2001-MarkerlessMotionCaptureofComplexFull-BodyMovementforCharacterAnimationDocument12 pagesFile 1667643029 110340 2001-MarkerlessMotionCaptureofComplexFull-BodyMovementforCharacterAnimationdevansh gargNo ratings yet
- Simultaneous Localization and Mapping: Problem DefinitionDocument7 pagesSimultaneous Localization and Mapping: Problem DefinitionVishal ShuklaNo ratings yet
- Automatic Detection of Bike-Riders Without Helmet Using Surveillance Videos in Real-TimeDocument6 pagesAutomatic Detection of Bike-Riders Without Helmet Using Surveillance Videos in Real-Timedhinesh sNo ratings yet
- Error Analysis For Visual Odometry On Indoor, Wheeled Mobile Robots With 3-D SensorsDocument11 pagesError Analysis For Visual Odometry On Indoor, Wheeled Mobile Robots With 3-D SensorsAnjireddy ThatiparthyNo ratings yet
- Toward Building A Robust and Intelligent Video Surveillance System: A Case StudyDocument4 pagesToward Building A Robust and Intelligent Video Surveillance System: A Case StudyUriel OuakeNo ratings yet
- Preprints202308 1425 v1Document17 pagesPreprints202308 1425 v1Maharani SwistaNo ratings yet
- Obstacle Detection For Unmanned Ground Vehicles:: A Progress ReportDocument14 pagesObstacle Detection For Unmanned Ground Vehicles:: A Progress ReportPrasenjit SahaNo ratings yet
- Payeurl,: Beriault'Document6 pagesPayeurl,: Beriault'infodotzNo ratings yet
- 3D Tracking and Classification System UsDocument24 pages3D Tracking and Classification System UsAlexandru MatasaruNo ratings yet
- FYP Review PaperDocument6 pagesFYP Review PaperMatthew MontebelloNo ratings yet
- Prokaj Zhao Medioni Wasa 2012Document7 pagesProkaj Zhao Medioni Wasa 2012Seif CharafNo ratings yet
- Po-Jui Huang and Duan-Yu Chen Department of Electrical Engineering, Yuan Ze University, Chung-Li, Taiwan Dychen@saturn - Yzu.edu - TW, S970561@mail - Yzu.edu - TWDocument5 pagesPo-Jui Huang and Duan-Yu Chen Department of Electrical Engineering, Yuan Ze University, Chung-Li, Taiwan Dychen@saturn - Yzu.edu - TW, S970561@mail - Yzu.edu - TWArati ChavanNo ratings yet
- A Review of Monocular Visual Odometry: The Visual Computer June 2019Document16 pagesA Review of Monocular Visual Odometry: The Visual Computer June 2019Saimoon QuaziNo ratings yet
- Pragma-Oriented Parallelization of The Direct Sparse Odometry SLAM AlgorithmDocument8 pagesPragma-Oriented Parallelization of The Direct Sparse Odometry SLAM AlgorithmDionata Nunes Elisa MassenaNo ratings yet
- Region-Based Moving Shadow DetectionDocument53 pagesRegion-Based Moving Shadow DetectionAbdul RazzakNo ratings yet
- Optical Flow Paper181finalDocument7 pagesOptical Flow Paper181finaljohndenningsNo ratings yet
- Deep Learning Techniques For Visual SLAM A SurveyDocument25 pagesDeep Learning Techniques For Visual SLAM A Surveyragnoraffaele162No ratings yet
- Theoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlFrom EverandTheoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlNo ratings yet
- The Impact of Technology On Modern Architecture #ABC123Document4 pagesThe Impact of Technology On Modern Architecture #ABC123Antonio C. KeithNo ratings yet
- The Evolution of Urban Design: From The Ancient World To The Modern Metropolis #GHI789Document4 pagesThe Evolution of Urban Design: From The Ancient World To The Modern Metropolis #GHI789Antonio C. KeithNo ratings yet
- Preserving The Past: The Role of Historic Preservation in Architecture #MNO345Document5 pagesPreserving The Past: The Role of Historic Preservation in Architecture #MNO345Antonio C. KeithNo ratings yet
- Redefine 101Document6 pagesRedefine 101Antonio C. KeithNo ratings yet
- Mix 456Document6 pagesMix 456Antonio C. KeithNo ratings yet
- EcoSphere 4321Document6 pagesEcoSphere 4321Antonio C. KeithNo ratings yet
- FuturaVista 8165Document6 pagesFuturaVista 8165Antonio C. KeithNo ratings yet
- Pardigmas 2Document5 pagesPardigmas 2Antonio C. KeithNo ratings yet
- Urban Oasis-6934Document6 pagesUrban Oasis-6934Antonio C. KeithNo ratings yet
- Horizon 123Document10 pagesHorizon 123Antonio C. KeithNo ratings yet
- Dingledy The Corpus Juris Civilis A Guide To Its History and Use Accepted Manuscript VersionDocument41 pagesDingledy The Corpus Juris Civilis A Guide To Its History and Use Accepted Manuscript VersionAntonio C. KeithNo ratings yet
- Norm 456Document6 pagesNorm 456Antonio C. KeithNo ratings yet
- Play 789Document6 pagesPlay 789Antonio C. KeithNo ratings yet
- Civitai ApiDocument17 pagesCivitai ApiAntonio C. KeithNo ratings yet
- Export Codex Ashburnham Facsimile PDFDocument1 pageExport Codex Ashburnham Facsimile PDFAntonio C. KeithNo ratings yet
- Information Codes of Mutant Forms: Arch. Bojan BaleticDocument15 pagesInformation Codes of Mutant Forms: Arch. Bojan BaleticAntonio C. KeithNo ratings yet
- Pedsim: Quick Start GuideDocument6 pagesPedsim: Quick Start GuideAntonio C. KeithNo ratings yet
- CopperToxicity PDFDocument7 pagesCopperToxicity PDFAntonio C. KeithNo ratings yet
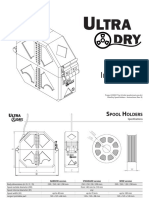
- UltraDry Spool Holders - Instructions PDFDocument15 pagesUltraDry Spool Holders - Instructions PDFAntonio C. KeithNo ratings yet
- CopperToxicity PDFDocument7 pagesCopperToxicity PDFAntonio C. KeithNo ratings yet
- StarCraft II A New Challenge For Reinforcement LearningDocument20 pagesStarCraft II A New Challenge For Reinforcement LearningAntonio C. KeithNo ratings yet
- tp132 c2 PDFDocument9 pagestp132 c2 PDFAntonio C. KeithNo ratings yet
- Discrete Shells: Eurographics/SIGGRAPH Symposium On Computer Animation (2003) D. Breen, M. Lin (Editors)Document7 pagesDiscrete Shells: Eurographics/SIGGRAPH Symposium On Computer Animation (2003) D. Breen, M. Lin (Editors)Antonio C. KeithNo ratings yet
- DA PAM 415 28 Guide To Army Real Property Category CodesDocument483 pagesDA PAM 415 28 Guide To Army Real Property Category CodesAntonio C. Keith100% (1)
- History of CAD - CAE CompaniesDocument5 pagesHistory of CAD - CAE CompaniesAntonio C. KeithNo ratings yet
- Batch Controller LH SeriesDocument1 pageBatch Controller LH SeriesakhlaquemdNo ratings yet
- Loss Prevention PresentationDocument46 pagesLoss Prevention PresentationThanapaet RittirutNo ratings yet
- PAM For Informatica MDM Multidomain Edition 10.1Document2 pagesPAM For Informatica MDM Multidomain Edition 10.1Sourajit MitraNo ratings yet
- 03 Planning Application and Dimension OverviewDocument36 pages03 Planning Application and Dimension OverviewAnil Nanduri100% (1)
- Cultural Safety EssayDocument5 pagesCultural Safety Essayzac_houstonNo ratings yet
- Bhabha Atomic Research Centre BARC, MysuruDocument2 pagesBhabha Atomic Research Centre BARC, Mysururajesh kumarNo ratings yet
- Flexible Vision Software SetupDocument12 pagesFlexible Vision Software SetupAnonymous 1vMe99XL7INo ratings yet
- Unit N°1: Institucion Educativa Politécnico de Soledad English 10ThDocument3 pagesUnit N°1: Institucion Educativa Politécnico de Soledad English 10ThMaria EscolarNo ratings yet
- 3 Flowserve CatalogueDocument268 pages3 Flowserve CatalogueSudherson JagannathanNo ratings yet
- TEST - 3 - Code-C All India Aakash Test Series For JEE (Main) - 2020Document22 pagesTEST - 3 - Code-C All India Aakash Test Series For JEE (Main) - 2020Shivam NishadNo ratings yet
- The Highlands Critical Resources and Teasured LandscapesDocument381 pagesThe Highlands Critical Resources and Teasured LandscapesYaqun CaiNo ratings yet
- Morning Routine: Cheat SheetDocument4 pagesMorning Routine: Cheat Sheetvipgaming fourthNo ratings yet
- Data ModelingDocument98 pagesData ModelingparthascNo ratings yet
- r050210803 Chemical Process CalculationsDocument8 pagesr050210803 Chemical Process CalculationsSrinivasa Rao GNo ratings yet
- Project Management Methodologies and ConceptsDocument24 pagesProject Management Methodologies and ConceptsrnvvprasadNo ratings yet
- X16 42552VS2010UltimTrial1Document2 pagesX16 42552VS2010UltimTrial1An LcNo ratings yet
- Univariate Homework 2 (1) CompletedDocument6 pagesUnivariate Homework 2 (1) CompletedNytaijah McAuleyNo ratings yet
- Population QuestionsDocument79 pagesPopulation QuestionsBooNo ratings yet
- Effect of Hamstring Emphasized Resistance Training On H-Q Strength RatioDocument7 pagesEffect of Hamstring Emphasized Resistance Training On H-Q Strength RatioRaja Nurul JannatNo ratings yet
- SphitDocument4 pagesSphitWild LocketNo ratings yet
- 03 Task Performance 1 - ARG - MMW - RelevoDocument4 pages03 Task Performance 1 - ARG - MMW - Relevocessarine relevoNo ratings yet
- Introduction To Media ART: Course: History of Media Art Instructor: Zeib JahangirDocument17 pagesIntroduction To Media ART: Course: History of Media Art Instructor: Zeib JahangirLiaqat AleeNo ratings yet
- Null HypothesisDocument10 pagesNull HypothesisarmailgmNo ratings yet
- Keshav Mohaneesh Aumeer 16549793 Assignment 2 Case Study Managing Change 3002Document12 pagesKeshav Mohaneesh Aumeer 16549793 Assignment 2 Case Study Managing Change 3002pri demonNo ratings yet
- Mahin Rahaman RESUMEDocument1 pageMahin Rahaman RESUMEMahin RahamanNo ratings yet
- 8259 Programmable ControllerDocument44 pages8259 Programmable ControllerShilpa ShettyNo ratings yet
- Stochastic ProgrammingDocument315 pagesStochastic Programmingfeiying1980100% (1)
- EXPATRIATESDocument38 pagesEXPATRIATESdsouzaa100% (2)
- Manual PhreeqcDocument326 pagesManual PhreeqcSandra BriceñoNo ratings yet
- PUP Manual EnglishDocument455 pagesPUP Manual EnglishCharo Pajuelo ChaskaNo ratings yet