Professional Documents
Culture Documents
Hyun Hak Cho 2013
Uploaded by
huy.tranvugia1305Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Hyun Hak Cho 2013
Uploaded by
huy.tranvugia1305Copyright:
Available Formats
2013 IEEE RO-MAN: The 22nd IEEE International Symposium on TuA1.1P.
20
Robot and Human Interactive Communication
Gyeongju, Korea, August 26-29, 2013
Independence Localization System for Mecanum Wheel AGV
Hyunhak Cho, Hajun Song, Moonho Park, Jaeyong Kim, Seungbeom Woo, and Sungshin Kim
Abstract— This study deals with the independent localization it is small size and low power consumption. The strapdown
system of AGV which is sensor fusion strapdown inertial technique is a method which keeps attitude of accelerometer
navigation system and laser navigation to develope more fast and using attitude measurement result of gyro. However, the SINS
accurate for the AGV. the strapdown inertial navigation system is difficult to apply to the AGV because the SINS demand less
is very expensive and has large system. Hence, we propose the error and expensive accelerometer and gyro to maintain
independent and stable localization system with sensor fusion higher or the same as the previous INS[13,14]. The SINS
using a low-cost strapdown inertial navigation system which which can high speed localization without the influence of
consists of MEMS inertial sensor. To reduce errors of the external factors of moving object has very benefit to
strapdown inertial navigation system, we performed localization of AGV, but it is unsuitable to low cost AGV
compensation using proportional method to gyro sensor and rather than airplane and military equipment. Therefore, in the
low-pass filter to accelerometer. We used transformation matrix generality of cases, the AGV used mostly encoder and gyro
with a result of attitude reference using Kalman filter. Finally, to
for localization. However, if the encoder is used, it has
compensate the result of error, fuzzy inference system is used. To
problem that is subordinate to structure of system.
verify the performance of the proposed system, experiments is
performed with a Mecanum wheeled AGV and a forklift AGV. This problem is divided to apply encoder in AGV, to be
In the experiments result, we confirmed that the proposed adapted the AGV at environment and to recycle completed
system can estimate the position. positioning system. First problem is that the AGV is applied
I. INTRODUCTION the encoder. This problem is impossible to resolve due to
structural defect and cost increase from installing encoder in
In the early 20th century, the technique for localization of the AGV. Second problem is environment adaptation. The
moving type military equipment according to military purpose localization system which is made depending on structure of
is rapid developed. Those techniques reduce loss of lives kinematic of AGV requires detailed optimization according to
which occurred because people was carrier of arms to directly environment in the AGV. If the AGV moves at indoor and
attack at enemy camp in past, and those are developed to show outdoor that are large changes of environment without single
technical superiority among power nations[1-4]. Global environment. Third problem is that the AGV redo
positioning system (GPS) developed at that time measure environment adaptation because if localization system using
absolute positioning of airplane and missile in Earth's global. encoder in an AGV is made, the AGV is not perfect equal to
A pinpoint strike arm using it was developed. However, the mechanism even though structure of the AGV is equal. To
GPS is unsuitable for localization of moving object at high solve problem is inefficiency of encoder, using SNIS give
speed as airplane and missile because it has low speed better results because it resolve completely system
response time. To make up for fault, inertial navigation system dependence of encoder and it can measure high speed position
(INS) which can measure moved variation through to measure of 10ms better than localization system using encoder on
inertial of object is made[5-8]. maximum 50~100ms of speed. Response time of MEMS type
The INS is device to calculate relative moved variation of accelerometer and gyro is high speed 10ms or under.
object by integrating twice in measured acceleration of object Therefore, integration error to calculate position is decreased
through accelerometer[9-12]. It is used precision localization by the faster measurement of data. However, it is difficult to
of military equipment with GPS. In particular, strapdown INS resolve the error of the sensor occurred when using
(SINS) is applied autonomous guided vehicle (AGV) because considerably lower price sensor than the inertial sensor which
is commonly used for SINS. Even though SINS is developed
* This research was supported by the MKE(The Ministry of Knowledge
suitably for AGV, this problem makes that it difficult to apply.
Economy), Korea. thus, this paper propose a method to solve a fundamental
H. H. Cho is with the Department of Interdisciplinary Cooperative matter of SINS, and propose localization system to fuse
Course: Robot, Pusan National University, Pusan, Korea (e-mail: Kalman filter, Fuzzy inference system, SINS and Laser
darkruby1004@pusan.ac.kr). navigation for localization of AGV. Laser navigation is
H.J. Song is with the Department of Electrical Engineering, Pusan
Global localization with the high accuracy, but has slow
National University, Pusan, Korea (e-mail: darkhajun@pusan.ac.kr).
M.H. Park is with the Department of Electrical Engineering, Pusan response rate of 250 ms or more. The SINS has the fast slow
National University, Pusan, Korea (e-mail: 82akakak@pusan.ac.kr). response, though it has a aforementioned fundamental matter.
J.Y Kim is with the Department of Electrical Engineering, Pusan National Therefore, we were used to mix the merit of laser navigation
University, Pusan, Korea (e-mail: arioner@pusan.ac.kr). and SINS through the Kalman filter, and reduced the error of
S.B Woo was with the Department of Interdisciplinary Cooperative SINS by Fuzzy inference system. Kalman filter was used to
Course: Robot, Pusan National University, Pusan, Korea (e-mail:
rhei@pusan.ac.kr).
fill the gap of the sensors(Laser navigation and SINS) through
S.S Kim is with the Electrical Engineering Department, Pusan National to fuse the data of sensors and to calculate the speed and
University, Pusan, Korea (corresponding author to provide phone: position information by the estimated information in Kalman
+82-51-510-2374; fax: +82-51-510-0212; e-mail: sskim@pusan.ac.kr).
978-1-4799-0509-6/13/$31.00 ©2013 IEEE 192
filter, however it is not possible to fully compensate the error, The temperature can affect the data from gyro sensor, one
using SINS initial acceleration is defined in the estimation of the features of gyro sensor. Therefore, the process of
procedure to the Kalman filter. Specially, the reliability of temperature compensation is necessary to (1). However, in the
position calculated using the SINS is lower, because the result of temperature compensation test using real sensor, the
accelerometer used in the proposed sensors fusion localization effect of temperature compensation has very small value
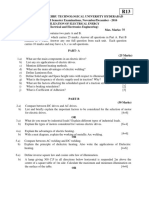
week sensor noise or external vibrate. To solve this problem, enough to ignore. Fig. 1 shows the result of temperature
we used FIS that inputs of it are direction constituent of compensation test using real sensor. X-axis and y-axis present
position value estimated through Kalman filter and direction the temperature and data of gyro sensor, respectively.
of real AGV [15-17].
Fig. 1 presents the box-plot of analysis of
The paper is composed as follows. The localization device interconnectedness between temperature and data of gyro
used for this paper is described in section 2 and we analyze sensor. Test carried out about 10 hours when the gyro sensor
proposed system from this paper in section 3. In section 4, we kept the stopped state. According to the change of average of a
verify the performance of localization through a series of thousand random data from the test for each temperature, the
experiments. Finally, the conclusion of this paper is shown in temperature is scarcely ineffective. In addition, the effect of
section 5. temperature was ignored because the proposed SINS measure
its localization within 10 second.
Figure 1. Raw data and temperature of gyro sensor.
II. INERTIAL SENSOR 2056
2054
In this section, we analyze the feature of inertial sensor 2052
which is used for composing of the SINS. Inertial sensors 2050
what we use for the proposed SINS are 1-axis gyro sensor, 2048
Gyro Raw data
2-axis gyro sensor and 3-axis acceleration sensor. Gyro sensor 2046
and acceleration sensor what we used are one of MEMS
2044
2042
sensor. LPR530AL gyro sensor which is built-in 2040
myARS-USB, the device for posture estimating, of Withrobot, 2038
Inc. is used as 2-axis gyro sensor and BMA150 acceleration 2036
sensor is used as the 3-axis acceleration sensor, respectively. 2034
2061 2062 2063 2064 2065 2066 2067 2068 2069 2070 2071 2072 2073
Gyro Temperature
2074 2075 2076 2077 2078 2079 2080 2081 2082 2083
To measure the yaw, myGyro300SPI of Withrobot Inc. is used
as the 1-axis gyro sensor. B. Accelerometer
The accelerometer specifications that are used in the
A. Gyro sensor proposed SINS are as in Table 2.
SINS estimate the posture of the body, and the result of
estimation is reflected in localization. Thus, analysis of the TABLE II. SPECIFICATIONS OF 3-AXIS ACCELERATION SENSOR
feature of gyro sensor for posture estimating is important.
Table 1 shows the specifications of each gyro sensor. Parameter Specification
supply Voltage 3.4~3.6V
TABLE I. SPECIFICATIONS OF GYRO SENSORS SPI(serial peripheral interface)
communication
I2C(inter IC control interface)
Parameter 2-axis gyro 1-axis gyro
range 2.0 / 4.0 / 6.0 g
supply Voltage 2.7~3.6V 4.75~5.25V
256 Lsb/g (at 2.0g)
communication Analog voltage SPI sensitivity 128 Lsb/g (at 6.0g)
range ±300°/s ±300°/s 64 Lsb/g (at 8.0g)
bandwidth 140Hz 40Hz
sensitivity 0.242°/s/LSB 0.25°/s/LSB The SINS is possible to measure position about X, Y, and
Z axis. However, in case of AGV, The paper performs only
the position calculation about X, Y axis, because Altitude
Posture estimating requires not only roll, pitch but also change is almost nothing. However, in case of AGV, The
yaw. In the case of roll and pitch, they can be fused in paper performs only the position calculation about X, Y axis,
acceleration sensor using KF whereas yaw. For this reason, in because Altitude change is almost nothing. In this case, X and
this paper, we choice the high-accuracy gyro sensor for Y axis of acceleration sensor should be exactly perpendicular
estimating of yaw than gyro sensor for roll and pitch. The to the center of the earth, because output values of
equation to calculate the angular velocity of 1-axis and 2-axis acceleration sensor include value of two type and acceleration
gyro sensor is as follows. In (1), Const presents the sensitivity sensor outputs to both acceleration of gravity and movement
of sensor. It has 0.250 and 0.242 when gyro sensor is 1-axis acceleration. If X and Y axis of acceleration sensor aren’t
and 2-axis, respectively. perpendicular to the center of the earth, Large errors occur
when calculating the position because the actual acceleration
Angularvelocity = (GyroADC GyrocenterConst values. Moving vehicle makes the oscillation, though it
978-1-4799-0509-6/13/$31.00 ©2013 IEEE 193
includes the difference according to the working B. Sensor fusion using KF
environments, and it makes the affect to acceleration sensor. Used gyro sensor and acceleration sensor in this paper
Low pass filter is used for compensation of oscillation. Fig. 2 belong to low cost sensors and can be applied for indoor AGV
shows the measured data of acceleration sensor which is whereas the INS inertial sensor belongs to high cost, which
applied to the low pass filter. used for air transportation or submarine. However, single
inertial sensor is hardly used alone because the lower cost
Figure 2. Result of low pass-filter of accelerometer.
sensors have the larger error. In this case, KF can make the
high accuracy of measured data from these sensors. For this
600 600
600 600
400 400
400 400
200 200 200 200 reason, we fused laser navigation sensor with inertial
X-axis Acc. Data
X-axis Acc. Data
X-axis Acc. Data
X-axis Acc. Data
0 0 0 0
navigation system using KF to overcome the weakness of
-200
-400
-200 -200
-400
-200
them. Moreover, this fused system makes the independence
from the kinematics of AGV. Fig. 4 presents the sensor fusion
-400 -400
-600 -600 -600 -600
0 200 0 400 200 600 400 800 600 1000 800 1200 1000 1400 1200 1600 1400 1800 16002000 1800 2000 0 200 0 400 200600 400800 1000
600 1200
800 1400
1000 1600
1200 1800
1400 2000
1600 1800 2000
block using KF.
Time Time Time Time
(a) before (b) after
Figure 4. Sensor fusion using KF.
400 400 400 400
200 200 200 200
However, define the system error and measurement error
Y-axis Acc. Data
Y-axis Acc. Data
Y-axis Acc. Data
Y-axis Acc. Data
0 0 0 0
Gyro Low pass b Attitude , ,
-200 -200
, ,
of KF is important for fusion of laser navigation and
-200 -200
Sensor filter computation Laser
-400 -400
-400 -400
Navigation
acceleration sensor.
-600
-600
0 200 400 600 800 1000 1200 1400 1600 1800 2000
-600
-600
0 200 400 600 800 1000 1200 1400 1600 1800 2000 Kalman
0 200 400 600 800 1000 1200 Time 1400 1600 1800 2000 0 200 400 600 800 1000 1200 1400
Time 1600 1800 2000 Cbn
Time Time
filter
TABLE III. ERROR OF ACCELERATION SENSOR IN STOP Center
f b Transformation fn Navigation
Accelerometer to reference V n, X n
Compensation axes Processing
Parameter X-axis Y-axis
average 0.40 -0.29
C. Position compensation using FIS
maximum 7.34 7.35
Through the process of sensor fusion using KF, we are
minimum -6.96 -7.74 able to calculate the velocity and position for each x-axis and
variance 10.2453 10.6134 y-axis. However, localization using acceleration is perfectly
unable to compensate the localization error after the initial
acceleration was decided. Used acceleration sensor of
In this paper, we moved the acceleration sensor for each proposed sensor fusion localization method has the weakness
axis with fixed speed. Table 3 shows the error of acceleration in noise of sensor or external oscillation, and the reliability of
sensor with stopped state. Calculating the error is done by information of position which calculated from SINS gets
comparison the average of nearly 50 data with measured data lower as time goes by. To solve such problem, we designed
of acceleration sensor. Table 3 shows the two results. One of FIS which considered the direction of real AGV and the
them, for X-axis, has the 0.40 average error and 10.2453 direction of estimated position calculated from KF. FIS is
variance error when the acceleration sensor kept the stopped designed because the output of accelerometer was presented
state. In case of Y-axis, it has the –0.29 average error and as shown in Fig. 5.
10.6134 variance errors, too.
Figure 5. Output of accelerometer.
20 20 2 2
0 0
0
III. PROPOSED SYSTEM
0
-2 -2
-20 -20 -4 -4
X-axis position(mm)
Y-axis position(mm)
X-axis position(mm)
Y-axis position(mm)
-6 -6
-40 -40
-8 -8
A. System configuration -60 -60
-10 -10
-80 -80 -12 -12
This section shows the compensation method of proposed -100 -100
-14
-16
-14
SINS and posture estimating method. Fig. 3 shows the
-16
-120 -120 -18 -18
0 1000 200
100 300
200 400
300 500
400 600
500 600 0 1000 200
100 300200 400300 500400 600500 600
proposed localization method of SINS for AGV.
Time Time Time Time
(a) x-axis (b) y-axis
Figure 3. Flow of proposed method of sensor fusion.
Fig. 5 (a) presents the local position of AGV for each
x-axis and y-axis when the AGV moved 100mm toward to
x-axis. We can know that the AGV moved only x-axis but the
position of AGV shows the movement toward to y-axis, also.
However, yaw scarcely has the change because the direction
of AGV’s driving is calculated from gyro sensor and laser
navigation, and it is exactly able to present the direction of
AGV’s driving, relatively. The direction of AGV’s driving
can be calculated by (2) if the AGV’s previous position and
current position were known. Using this information, we
978-1-4799-0509-6/13/$31.00 ©2013 IEEE 194
applied FIS to compensate the error of local position which exist, we can’t confirm the quantified performance of all
has the uncertain value. driving courses. However, setting intentionally interval to
block measurement of laser navigation, we verify the
= tan-1(yt+1-yt / xt+1-xt) performance through the work to compare value to check
actually using laser navigation. Laser navigation is equipment
In (2), x, y presents the position, and present the with high reliability as machine to measure with an error
calculated angle, respectively. tolerance of 4~10mm in designated indoor area. The laser
In this paper, the angle which calculated by KF and yaw navigation in experiment is NAV200 of Co. SICK. Fig. 7 is
which measured from gyro sensor and laser navigation are the experimental space and the AGV used in experiments.
considered to FIS as input values. Output value of FIS
presents the transformation angle to correct the direction of B. Localization Test
AGV ’ s driving. Fig. 6 shows the input and output Figure 7. Mecanum wheeled AGV and experiments area
membership function of FIS, and Table 4 shows the rules of
FIS.
Figure 6. Result of straight driving.
L M H L M H
1 1
0.8 0.8
Degree of membership
Degree of membership
0.6 0.6
0.4 0.4
0.2 0.2
0 0
0 50 100 150 200 250 300 350 0 50 100 150 200 250 300 350
Angle using position Angle of gyro and laser navigation
(a) Position Angle(Input 1) (b) Yaw Angle(Input 2)
L ML M MH H
1
0.8
Degree of membership
0.6
0.4
0.2
As mentioned, experimental method is that the AGV was
0
repeatedly driving 10 times each about all directions, that is
0 50 100 150 200
Angle for compensation
250 300 350
straight, side and diagonal, and that a half of total running
(c) Angle for compensation(Output)
times is stopped intentionally. If laser navigation doesn’t
perform for 1~2 seconds per 2~3 times about entire driving
times, the way to block is that observational value of Kalman
filter doesn’t be inputted. Fig. 8 shows a result which was
TABLE IV. RULE OF FUZZY REFERENCE chosen randomly among repeated experiments 10 times about
straight driving.
Position
Angle L M H Figure 8. Result of straight driving.
Yaw Angle
L L ML L
M ML M MH
H L MH H
For FIS, Mamdani fuzzy is applied, and Centroid of area
(COA) is applied as the defuzzification. Equation (3) shows
the equation of COA.
COAyiyiyi
IV. EXPERIMENT
In Fig. 8, it is graph about measured positions and it is
A. Experimental Environment graph to expand a section among randomly blocked sections
To evaluate the performance of localization using the in total running results. As shown in Fig 8, localization using
proposed sensor fusion, we performed experiments to the proposed sensor fusion supplements blocking of laser
measure the position about driving of straight, side and navigation exactly. Table 5 shows maximum distance errors
diagonal of 3x3 m2 using a Mecanum wheel AGV. Since the and average distance errors to calculate 10 times in blocked
true value to verify the behavior of laser navigation doesn’t sections about straight driving.
978-1-4799-0509-6/13/$31.00 ©2013 IEEE 195
TABLE V. DISTANCE ERRORS OF STRAIGHT DRIVING straight driving. This result occurs because the vibrations of
st
1 blocking(1sec) nd
2 blocking(1sec) Mecanum wheel AGV of sideways driving are happened more
Times Maximum Average Maximum Average frequently than straight driving. Finally, Fig. 10 shows a result
(mm) (mm) (mm) (mm) of diagonal driving and Table 7 shows errors to calculate 10
1 13.5086 6.4532 13.0391 6.6571 times of diagonal driving.
2 13.1056 4.5092 13.6952 6.7201 Figure 10. Result of straight driving.
…… …… …… …… ……
9 12.9962 4.1164 13.3033 6.5781
10 13.1383 4.5101 12.9693 6.5988
avg 13.1589 4.5966 13.4509 6.8988
In the case of blocking, maximum error is 13.1589mm and
average error is 4.5966mm at 1st blocking time. Similarly
maximum error is 13.4509mm and average error is 6.8988mm
at 2st blocking time. Fig. 9 shows a result of sideways driving
and Table 6 shows errors to calculate 10 times of sideways
driving.
Figure 9. Result of straight driving.
TABLE VII. DISTANCE ERRORS OF DIAGONAL DRIVING
st
1 blocking(1sec) 2nd blocking(1sec)
Times Maximum Average Maximum Average
(mm) (mm) (mm) (mm)
1 13.5086 6.4532 13.0391 6.6571
2 13.1056 4.5092 13.6952 6.7201
…… …… …… …… ……
9 10.1448 2.4532 10.8206 6.2243
10 10.0867 2.3199 10.1460 4.7020
avg 13.9199 4.0976 12.9752 5.8357
As mentioned earlier, maximum error of diagonal driving
TABLE VI. DISTANCE ERRORS OF SIDEWAYS DRIVING is 13.9199mm and average error of diagonal driving is
1st blocking(1sec) 2nd blocking(1sec) 4.0976mm at 1st blocking time. At 2st blocking time,
Times Maximum Average Maximum Average maximum error is 12.9752mm and average error is
(mm) (mm) (mm) (mm) 5.8357mm. Likewise, diagonal driving has similar errors, but
1 13.5086 6.4532 13.0391 6.6571 error change is bigger than straight or sideways driving. This
result occurs because the vibrations of Mecanum wheel AGV
2 13.1056 4.5092 13.6952 6.7201 are happened more frequently than straight or sideways
…… …… …… …… …… driving. As an experimental result, accumulated error of SINS
for 1~2 seconds decreased. If laser navigation isn’t working
9 12.8504 6.8317 18.5931 9.9893
for 1~2 seconds, control error increases rapidly. SINS has
10 12.6703 3.4438 12.0995 5.8907 more error than laser navigation, but can localization
consistently.
avg 13.4333 4.7352 13.8419 5.8253
In the case of blocking of sideways driving, maximum V. CONCLUSIONS
error is 13.4333mm and average error is 4.7352mm at 1st
blocking time. At 2st blocking time, maximum error is The purpose of this study is about t localization which is
13.8419mm and average error is 5.8253mm. Fig. 9 shows a faster and higher precision through Sensor fusion of
result of sideways driving and Table 6 shows errors to strapdown inertial navigation system(SINS). To develop
calculate 10 times of sideways driving. Straight and sideways common localization system, we supplement a localization
driving to be stable relatively with no wobble have similar sensor to select SINS to be suitable for property of AGV. The
errors, but error change of sideways driving is bigger than method to correct error about measuring data of gyro sensor to
978-1-4799-0509-6/13/$31.00 ©2013 IEEE 196
be used for SINS is by using stochastically distribution [10] J. H. Kim, H. G. Min, J. D. Cho, J. H. Jang, S. Kwon and E. T. Jeung,
characteristics of gyro sensor data. Acceleration sensor error “Design of angular estimator of inertial sensor using the least square
method”, World Academy of Science, Engineering and Technology,
of measurement data is corrected by applying a low-pass filter pp. 502-505, 2009.
generally. Attitude heading reference system(AHRS) for [11] G. Pang and H. Liu, “Evaluation of a Low-cost MEMS Accelerometer
SINS is applied model to be used Kalman filter of quaternion for Distance Measurement,” Journal of Intelligent & Robotic Systems,
form applied by AHRS generally. We simplify location Vol. 30, No. 3, pp. 249-265, 2001.
calculation process considering both fast measuring velocity [12] Wilcox and C. James, “A New Algorithm for Strapped-Down Inertial
of 10~50ms and distance. We also simplify location Navigation,” Aerospace and Electronic Systems, IEEE Transactions
on, Vol. 3, No. 5, pp. 796-802, 2010.
calculation process considering that z-axis of AGV isn’t [13] J. E. Bortz, “A New Mathematical Formulation for Strapdown Inertial
change in operation. SINS and common localization sensor, Navigation,” Aerospace and Electronic Systems, IEEE Transactions
laser navigation, is fused by Kalman filter. In order to correct on, Vol. 7, No. 1, pp. 61-66, 2007.
the position error, we applied the fuzzy inference system. To [14] Y. Wu, X. Hu, M. Wu and D. Hu, “Strapdown inertial navigation using
verify the performance of the localization system, Mecanum dual quaternion algebra: error analysis,” Aerospace and Electronic
Systems, IEEE Transactions on, vol. 42, no. 1, pp. 259-266, 2006.
wheel AGV performed experiment applied localization
[15] C. Albert, U. Etsuko, K. Yuichi and M. Yoshio , O. Tsukasa ,
system. Using Mecanum wheel AGV, We analyzed “Model-based hand pose estimation using multiple viewpoint
localization performance of localization system in situation silhouette images and Unscented Kalman Filter,” Robot and Human
that cannot be measured using laser navigation, because Interactive Communication. 2008. RO-MAN 2008. The 17th IEEE
Mecanum wheel AGV is too slow and measured density of International Symposium on, pp. 291-296, 2008.
laser navigation is high comparatively. As analyses result, [16] K. Takahashi, T. Sakaguchi and J. Ohya, “Real-time estimation of
human body postures using Kalman filter,” Robot and Human
maximum error is 13.1589mm and average error is 4.5966mm Interaction. 1999. RO-MAN '99. 8th IEEE International Workshop on,
of straight driving, maximum error is 13.4333mm and average pp. 189-194, 1999.
error is 4.7352mm of sideways driving, maximum error is [17] Y. C. Lee, Yu and W. P. Pil , “Practical map building method for
13.9199mm and average error is 4.0976mm of diagonal service robot using EKF localization based on statistical distribution of
driving. We could confirm that AGV verified position quickly noise parameters,” Robot and Human Interactive Communication.
and accurately like the results of the experiments. 2009. RO-MAN 2009. The 18th IEEE International Symposium on, pp.
478-483, 2009.
[18] communications channel equalization using radial basis function
networks,” IEEE Trans. Neural Networks, vol. 4, pp. 570–578, July
1993.
ACKNOWLEDGMENT [19] R. W. Lucky, “Automatic equalization for digital communication,”
Bell Syst. Tech. J., vol. 44, no. 4, pp. 547–588, Apr. 1965.
This research was supported by the MKE(The Ministry of [20] S. P. Bingulac, “On the compatibility of adaptive controllers (Published
Knowledge Economy), Korea, under the Human Resources Conference Proceedings style),” in Proc. 4th Annu. Allerton Conf.
Development Program for Special Environment Circuits and Systems Theory, New York, 1994, pp. 8–16.
Navigation/Localization National Robotics Research Center [21] G. R. Faulhaber, “Design of service systems with priority reservation,”
in Conf. Rec. 1995 IEEE Int. Conf. Communications, pp. 3–8.
support program supervised by the NIPA(National IT [22] W. D. Doyle, “Magnetization reversal in films with biaxial anisotropy,”
Industry Promotion Agency). (H1502-13-1001). in 1987 Proc. INTERMAG Conf., pp. 2.2-1–2.2-6.
[23] G. W. Juette and L. E. Zeffanella, “Radio noise currents n short sections
REFERENCES on bundle conductors (Presented Conference Paper style),” presented at
the IEEE Summer power Meeting, Dallas, TX, June 22–27, 1990,
[1] J. Crowley, “Navigation for an intelligent mobile robot,” IEEE Journal Paper 90 SM 690-0 PWRS.
of Robotics and Automation, pp. 31-41, 2002. [24] J. G. Kreifeldt, “An analysis of surface-detected EMG as an
[2] H. Hong and J. G. Lee, “A leveling Algorithm for an Underwater amplitude-modulated noise,” presented at the 1989 Int. Conf. Medicine
Vehicle Using Extended Kalman Filter,” Position Location and and Biological Engineering, Chicago, IL.
Navigation Symposium, pp. 280-285, 1998. [25] J. Williams, “Narrow-band analyzer (Thesis or Dissertation style),”
[3] I. Zunaidi, N. Kato, Y. Nomura and H. Matsui, “Positioning System for Ph.D. dissertation, Dept. Elect. Eng., Harvard Univ., Cambridge, MA,
4-Wheel Moble Robot: Encoder, Gyro and Accelerometer Data Fusion 1993.
with Error Model Method,” Chiang Mai University Journal, vol. 5, no. [26] N. Kawasaki, “Parametric study of thermal and chemical
1, pp. 1-14, 2006. nonequilibrium nozzle flow,” M.S. thesis, Dept. Electron. Eng., Osaka
[4] I. A. Vis, “Survey of Research in the Design and Control of Automated Univ., Osaka, Japan, 1993.
Guided Vehicle Systems,” European Journal of Operational Research [27] J. P. Wilkinson, “Nonlinear resonant circuit devices (Patent style),”
vol. 170, no. 3, pp. 677-709, 2006. U.S. Patent 3 624 12, July 16, 1990.
[5] C. Y. Chan, “A System Review of Magnetic Sensing System for
Ground Vehicle Control and Guidance,” California PATH Research
Report, UCB-ITS-PRR-2002-20, 2002.
[6] A. Dogandzic, J. Riba, G. Seco and A. L. Swindle-hurst, “Positioning
and Navigation with Applications to Communications,” IEEE Signal
Proc. Magazine, vol. 22, no. 4, pp. 10-11, 2005.
[7] K. H. Jung, J. M. Kim, J. J. Park, S. S. Kim and S. I. Bae, “Line
Tracking Method of AGV using Sensor Fusion,”Journal of Korean
institute of intelligent systems , vol. 20, no. 1, pp. 54-59, 2010.
[8] J. M. Kim, J. J. Park, T. R. Jeon and S. S. Kim, “Fuzzy and Proportional
Controls for Driving Control of Forklift AGV,” Journal of Korean
institute of intelligent systems, vol. 19, no. 5, pp. 699-705, 2009.
[9] W. Soehren and W. Hawkinson, “Prototype personal navigation
system,” Aerospace and Electronic Systems Magazine, IEEE, vol. 23,
no. 4, pp. 10-18, 2008.
978-1-4799-0509-6/13/$31.00 ©2013 IEEE 197
You might also like
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- D AdaptiveKalman Sensors 19 01142 v2Document24 pagesD AdaptiveKalman Sensors 19 01142 v2German QuirozNo ratings yet
- Fuzzy Adaptive Kalman Filtering For INS/GPS Data Fusion: February 2000Document7 pagesFuzzy Adaptive Kalman Filtering For INS/GPS Data Fusion: February 2000alfaristelecomNo ratings yet
- Unscented Kalman Filter For A Low Cost GNSS IMU Based Mobi 2024 Geodesy andDocument11 pagesUnscented Kalman Filter For A Low Cost GNSS IMU Based Mobi 2024 Geodesy andTuğçe DemirciNo ratings yet
- GPS INS Urban SettingDocument9 pagesGPS INS Urban SettingLogesan SrinivasaluNo ratings yet
- A Review of Navigation Systems (Integration and Algorithms)Document17 pagesA Review of Navigation Systems (Integration and Algorithms)amguardia100% (1)
- INS-Camera Calibration Without Ground Control Points: Daniel Bender, Marek Schikora, J Urgen Sturm and Daniel CremersDocument6 pagesINS-Camera Calibration Without Ground Control Points: Daniel Bender, Marek Schikora, J Urgen Sturm and Daniel Cremersqwerrty1029384756No ratings yet
- Solar Vector Solving Method Based On PhotovoltaicDocument13 pagesSolar Vector Solving Method Based On PhotovoltaicperelapelNo ratings yet
- Sensors: Pose Estimation of A Mobile Robot Based On Fusion of IMU Data and Vision Data Using An Extended Kalman FilterDocument22 pagesSensors: Pose Estimation of A Mobile Robot Based On Fusion of IMU Data and Vision Data Using An Extended Kalman Filterxyz shahNo ratings yet
- INS/magnetometer Integrated Positioning Based On Neural Network For Bridging Long Time GPS OutagesDocument11 pagesINS/magnetometer Integrated Positioning Based On Neural Network For Bridging Long Time GPS OutagesBetty SunNo ratings yet
- A Kalman Filtering Approach For Integrating MEMS-based INS and GPS For Land Vehicle ApplicationsDocument5 pagesA Kalman Filtering Approach For Integrating MEMS-based INS and GPS For Land Vehicle ApplicationsThời Hoa ĐỏNo ratings yet
- Integrated Position Estimation Using Aerial Image SequencesDocument18 pagesIntegrated Position Estimation Using Aerial Image Sequencesqwerrty1029384756No ratings yet
- 1 s2.0 S0888327017304211 MainDocument12 pages1 s2.0 S0888327017304211 MainSarkar SurajitNo ratings yet
- Sensors: Visual-Inertial Odometry With Robust Initialization and Online Scale EstimationDocument21 pagesSensors: Visual-Inertial Odometry With Robust Initialization and Online Scale EstimationЄвген ВознюкNo ratings yet
- 51 Wavelet De-Noising For IMU AlignmentDocument8 pages51 Wavelet De-Noising For IMU AlignmentHuneza AtaNo ratings yet
- Odometry Fusion IMU - 1.5066524Document9 pagesOdometry Fusion IMU - 1.5066524flv_91No ratings yet
- Sensors 19 04111Document31 pagesSensors 19 04111Carlos CarlosNo ratings yet
- A Simple Observer For Gyro and Accelerometer Biases in Land Navigation SystemsDocument14 pagesA Simple Observer For Gyro and Accelerometer Biases in Land Navigation Systemsdewe sunNo ratings yet
- (J) 2022 - User Position Affected by Outlier A Case Study of Moving-Horizon Estimation FilterDocument11 pages(J) 2022 - User Position Affected by Outlier A Case Study of Moving-Horizon Estimation Filterdr.awawdeh.moathNo ratings yet
- Visual-Inertial SLAM For A Small Helicopter in Large Outdoor EnvironmentsDocument2 pagesVisual-Inertial SLAM For A Small Helicopter in Large Outdoor EnvironmentsAlexandreSidantNo ratings yet
- Progress With Unisis: A Rayleigh Laser Guided Adaptive Optics SystemDocument7 pagesProgress With Unisis: A Rayleigh Laser Guided Adaptive Optics SystemJayant KulkarniNo ratings yet
- Low Cost GPS INS Sensor Fusion System For UAV NavigationDocument9 pagesLow Cost GPS INS Sensor Fusion System For UAV NavigationThaung Htut KhaungNo ratings yet
- Loosely Coupled GPS INS Integration With Kalman Filtering For Land Vehicle ApplicationsDocument6 pagesLoosely Coupled GPS INS Integration With Kalman Filtering For Land Vehicle Applicationstolgacakir185No ratings yet
- Combined Quaternion-Based Error State Kalman Filtering and Smooth Variable Structure Filtering For Robust Attitude EstimationDocument16 pagesCombined Quaternion-Based Error State Kalman Filtering and Smooth Variable Structure Filtering For Robust Attitude EstimationAdeeba AliNo ratings yet
- On The Location Accuracy of The Multi-AntennaDocument5 pagesOn The Location Accuracy of The Multi-Antennaاحمد نديم اسماعيلNo ratings yet
- Sensors 20 02544 v2Document16 pagesSensors 20 02544 v2Abdo ElmessiouiNo ratings yet
- A Sensor Fusion Algorithm For Cooperative LocalizationDocument8 pagesA Sensor Fusion Algorithm For Cooperative LocalizationVijaya YajnanarayanaNo ratings yet
- Chan SHP Final-NolinksDocument3 pagesChan SHP Final-NolinksaliNo ratings yet
- Sensors: Performance Analysis of Constrained Loosely Coupled GPS/INS Integration SolutionsDocument25 pagesSensors: Performance Analysis of Constrained Loosely Coupled GPS/INS Integration SolutionsAlvaroFernandezVillarNo ratings yet
- Articulo OK VerDocument7 pagesArticulo OK VeryuniervNo ratings yet
- Kinematic Positioning With An Integrated GPS/Pseudolite/INS: Hung Kyu Lee, Jinling Wang, Chris RizosDocument12 pagesKinematic Positioning With An Integrated GPS/Pseudolite/INS: Hung Kyu Lee, Jinling Wang, Chris RizosTeguh OktaprimaNo ratings yet
- Final Manuscript Mine R Edited KeighobadiDocument24 pagesFinal Manuscript Mine R Edited KeighobadiBionica BabovicNo ratings yet
- Development of A Low-Cost Solution For GPSGyro AttDocument11 pagesDevelopment of A Low-Cost Solution For GPSGyro AttCamacho Camacho RochaNo ratings yet
- Ghanbari 2015Document8 pagesGhanbari 2015yalocim666No ratings yet
- Multi CameraDocument36 pagesMulti CameraChaitra MuralidharaNo ratings yet
- Orientation and Displacement Detection For Smartphone Device Based IMUs ABHIJIT SUPREM1Document11 pagesOrientation and Displacement Detection For Smartphone Device Based IMUs ABHIJIT SUPREM1KimNo ratings yet
- Assignment of Avionics 2Document9 pagesAssignment of Avionics 2pramod kumar yadavNo ratings yet
- Sensors: Toward Accurate Position Estimation Using Learning To Prediction Algorithm in Indoor NavigationDocument27 pagesSensors: Toward Accurate Position Estimation Using Learning To Prediction Algorithm in Indoor Navigationvalerio modugnoNo ratings yet
- 98 e Aci 136Document7 pages98 e Aci 136Mohamad AlimadadiNo ratings yet
- Circumventing Dynamic Modeling Evaluation of The Error-State PDFDocument8 pagesCircumventing Dynamic Modeling Evaluation of The Error-State PDFvaseem akramNo ratings yet
- Optical Flow Paper181finalDocument7 pagesOptical Flow Paper181finaljohndenningsNo ratings yet
- Ultra-Wideband Based Cooperative Relative Localization Algorithm and Experiments For Multiple Unmanned Aerial Vehicles in GPS Denied EnvironmentsDocument18 pagesUltra-Wideband Based Cooperative Relative Localization Algorithm and Experiments For Multiple Unmanned Aerial Vehicles in GPS Denied EnvironmentsOmgvme50No ratings yet
- Study of Inertial Measurement Unit SensorDocument4 pagesStudy of Inertial Measurement Unit SensorĐinh Hữu KiênNo ratings yet
- CzechTechnicalUniversityinPrague MAlam DynamicsandControl FullArticleDocument9 pagesCzechTechnicalUniversityinPrague MAlam DynamicsandControl FullArticletolgacakir185No ratings yet
- Lecture 4th Navigation 8Document5 pagesLecture 4th Navigation 8Ahmed WasifNo ratings yet
- SV305 - R193649Z Assignment 1Document6 pagesSV305 - R193649Z Assignment 1arifetoivantanaka2000No ratings yet
- 04 AbstractDocument2 pages04 Abstractmail2balaji1992No ratings yet
- Research Article: Error Analysis and Compensation of Gyrocompass Alignment For SINS On Moving BaseDocument19 pagesResearch Article: Error Analysis and Compensation of Gyrocompass Alignment For SINS On Moving BaseTip's kNo ratings yet
- Low-Cost Sensors Data Fusion For Small Size Unmanned Aerial Vehicles Navigation and GuidanceDocument34 pagesLow-Cost Sensors Data Fusion For Small Size Unmanned Aerial Vehicles Navigation and GuidanceÇetin ElmasNo ratings yet
- Optimization-Based Gravity-Assisted Calibration and Axis Alignment of 9-Degrees of Freedom Inertial Measurement Unit Without External EquipmentDocument16 pagesOptimization-Based Gravity-Assisted Calibration and Axis Alignment of 9-Degrees of Freedom Inertial Measurement Unit Without External EquipmentLorenaNo ratings yet
- An INS GNSS Integrated Navigation in GNSS Denied Environmen - 2020 - Defence TecDocument7 pagesAn INS GNSS Integrated Navigation in GNSS Denied Environmen - 2020 - Defence Tecmatbaila247No ratings yet
- School Zone Safety System Based On Wireless SensorDocument21 pagesSchool Zone Safety System Based On Wireless SensorakashlogicNo ratings yet
- Tightly-Coupled Model Aided Visual-Inertial Fusion For Quadrotor Micro Air VehiclesDocument14 pagesTightly-Coupled Model Aided Visual-Inertial Fusion For Quadrotor Micro Air VehiclesbocailloNo ratings yet
- EScholarship UC Idedtem 5s740738Document28 pagesEScholarship UC Idedtem 5s740738Guillermo Soto ZuñigaNo ratings yet
- (2018 Abbas Albaidhani) Anchor Selection For UWB Indoor PositioningDocument17 pages(2018 Abbas Albaidhani) Anchor Selection For UWB Indoor Positioningalighaemifar1No ratings yet
- Stroboscopic Imaging Interferometer For MEMS Performance MeasurementDocument7 pagesStroboscopic Imaging Interferometer For MEMS Performance MeasurementKim Trinh Tran ThiNo ratings yet
- Application of Gps in Power SystemDocument2 pagesApplication of Gps in Power SystemRavinder KumarNo ratings yet
- Airborne Kinematic GPSPositioningfor PhotogrammetryDocument11 pagesAirborne Kinematic GPSPositioningfor PhotogrammetryAzem GanuNo ratings yet
- Sensor Data Fusion Using Kalman Filter: August 2000Document8 pagesSensor Data Fusion Using Kalman Filter: August 2000pruebaNo ratings yet
- Low-Cost Accelerometers For Robotic Manipulator PerceptionDocument7 pagesLow-Cost Accelerometers For Robotic Manipulator PerceptionAbbé BusoniNo ratings yet
- Research Article: Kalman Filter Sensor Fusion For Mecanum Wheeled Automated Guided Vehicle LocalizationDocument8 pagesResearch Article: Kalman Filter Sensor Fusion For Mecanum Wheeled Automated Guided Vehicle Localizationhuy.tranvugia1305No ratings yet
- AUH ThesisDocument66 pagesAUH Thesishuy.tranvugia1305No ratings yet
- Underwater GliderDocument30 pagesUnderwater Glidermohd danishNo ratings yet
- A Simulator Developed For A Twin-Pod AUV, The Marport SQX-500Document6 pagesA Simulator Developed For A Twin-Pod AUV, The Marport SQX-500huy.tranvugia1305No ratings yet
- Applsci 13 01551Document16 pagesApplsci 13 01551Anh NgoNo ratings yet
- My Daily Routine UNIT 3Document5 pagesMy Daily Routine UNIT 3Francisco EricesNo ratings yet
- The Perfect Integrated Solution For All Your Reverse Engineering ProjectsDocument1 pageThe Perfect Integrated Solution For All Your Reverse Engineering ProjectsflibflurbNo ratings yet
- Fujitsu Ten 86120 Pinout New in 2023 - Car Stereo Systems, Car Stereo, Car AudioDocument1 pageFujitsu Ten 86120 Pinout New in 2023 - Car Stereo Systems, Car Stereo, Car AudiosvezxboxNo ratings yet
- Iso Iec 18013 2 2020Document74 pagesIso Iec 18013 2 2020Mykola AstratonovNo ratings yet
- Ict As Medium Advocacy and Developmental CommunicationDocument27 pagesIct As Medium Advocacy and Developmental CommunicationJjfreak ReedsNo ratings yet
- Subject: Use of Multi-Core Processors Date: XXX AC No: AC 20-193 Initiated By: AIR-622Document17 pagesSubject: Use of Multi-Core Processors Date: XXX AC No: AC 20-193 Initiated By: AIR-622rdpereir100% (1)
- Domestic BER Technical Bulletin July 2020Document33 pagesDomestic BER Technical Bulletin July 2020Denis DillaneNo ratings yet
- Tri Lok Metal Seated Valve: Summary SpecificationDocument1 pageTri Lok Metal Seated Valve: Summary SpecificationBHARGAVNo ratings yet
- Basics of Networking and RoutingDocument39 pagesBasics of Networking and RoutingSaurabh ShuklaNo ratings yet
- Computer-3 1st QuarterDocument5 pagesComputer-3 1st QuarterEdmar John SajoNo ratings yet
- Practical Training Report Content Sample 3 - KTacDocument13 pagesPractical Training Report Content Sample 3 - KTacauni fildzah0% (1)
- 117JJ112016Document2 pages117JJ112016DEVULAL BNo ratings yet
- Source Documents and CodingDocument13 pagesSource Documents and CodingPalesaNo ratings yet
- Data Mining Model For Predicting Student Enrolment PDFDocument8 pagesData Mining Model For Predicting Student Enrolment PDFShuya HideakiNo ratings yet
- MFL71143102 - ManualOwner - (EN+SP) - LW1019IVSM - Rev 02 - 111919 - (P12816-18202123)Document60 pagesMFL71143102 - ManualOwner - (EN+SP) - LW1019IVSM - Rev 02 - 111919 - (P12816-18202123)julio ariasNo ratings yet
- Bayesian Optimization With GradientsDocument17 pagesBayesian Optimization With Gradients刘明浩No ratings yet
- Startup Menggunakan Control Objective For Information and Related Technology FrameworkDocument7 pagesStartup Menggunakan Control Objective For Information and Related Technology FrameworkAndini VatiadyNo ratings yet
- Determining Cause of Fuel Dilution of EnginesDocument6 pagesDetermining Cause of Fuel Dilution of EnginespedriscoNo ratings yet
- Copy of البيانات المفتوحة - المنتجات الصناعية - صناعات المعدات والآلات - 01Document83 pagesCopy of البيانات المفتوحة - المنتجات الصناعية - صناعات المعدات والآلات - 01mohammed sohsahNo ratings yet
- Amc 10A: Do Not Open Until Wednesday, July 1, 2020Document4 pagesAmc 10A: Do Not Open Until Wednesday, July 1, 2020pNo ratings yet
- FRP 1543494499564 - Grating Brochure - 2018Document6 pagesFRP 1543494499564 - Grating Brochure - 2018Ganesh KumarNo ratings yet
- Godrej South Estate - Detailed BrochureDocument67 pagesGodrej South Estate - Detailed BrochureBharat SharmaNo ratings yet
- Ose 12 Twin Ose Boxer OkDocument2 pagesOse 12 Twin Ose Boxer OkOrlando Rojas PintoNo ratings yet
- Part A: ListeningDocument7 pagesPart A: ListeningTrần HuyềnNo ratings yet
- Clients and Firms of The Future: How To CompeteDocument2 pagesClients and Firms of The Future: How To CompeteRoss DawsonNo ratings yet
- Product Data Sheet: iPRD40r Modular Surge Arrester - 1P - 350V - With Remote TransfertDocument3 pagesProduct Data Sheet: iPRD40r Modular Surge Arrester - 1P - 350V - With Remote TransfertLeonel Jesus Pareja MorenoNo ratings yet
- Weld Restoration of Disk - Example of Elliott Repair TechnologyDocument49 pagesWeld Restoration of Disk - Example of Elliott Repair TechnologyMachineryengNo ratings yet
- A. Levitin "Introduction To The Design & Analysis of Algorithms," 3rd EdDocument70 pagesA. Levitin "Introduction To The Design & Analysis of Algorithms," 3rd EdAmro AbosaifNo ratings yet
- Oracle Database Administration: Session 1Document43 pagesOracle Database Administration: Session 1JohnNo ratings yet
- Handbook of Metal Injection MoldingDocument3 pagesHandbook of Metal Injection MoldingPk Jha0% (2)