You might also like
- TransResp2ndOrdSys PDFDocument9 pagesTransResp2ndOrdSys PDFDhinesh PeriyasamyNo ratings yet
- Transient Response of A Second-Order SystemDocument9 pagesTransient Response of A Second-Order SystemJaz SantosNo ratings yet
- Lec 028Document5 pagesLec 028SaranyaNo ratings yet
- Laplace Transform ExamplesDocument5 pagesLaplace Transform ExamplesLeonard PhilipNo ratings yet
- Transverse Ising Chain (Pure System) : 2.1 Symmetries and The Critical PointDocument35 pagesTransverse Ising Chain (Pure System) : 2.1 Symmetries and The Critical PointEjmarcusNo ratings yet
- ECE 380 Problem Set 1 Review of Complex Numbers and Laplace TransformsDocument2 pagesECE 380 Problem Set 1 Review of Complex Numbers and Laplace TransformsJoe NguyenNo ratings yet
- Lecture 3 Bilinear TFDocument32 pagesLecture 3 Bilinear TFNathan KingoriNo ratings yet
- The Kosterlitz-Thouless TransitionDocument14 pagesThe Kosterlitz-Thouless TransitionKenzaNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Optical Solitons ExplainedDocument5 pagesOptical Solitons ExplainedmaneaviorelNo ratings yet
- Wavelets and Multirate Digital Signal Processing Frequency Domain BehaviourDocument6 pagesWavelets and Multirate Digital Signal Processing Frequency Domain BehaviourRANGANATHA P SRITNo ratings yet
- Numerical Methods For Ode Initial Value ProblemsDocument20 pagesNumerical Methods For Ode Initial Value Problems37 TANNUNo ratings yet
- ProjDocument10 pagesProjJosephNo ratings yet
- 45 MA515 NotesDocument52 pages45 MA515 NotesHostel 10 Hall ManagerNo ratings yet
- MIT2 04AS13 Lecture4 PDFDocument18 pagesMIT2 04AS13 Lecture4 PDFSatria WibowoNo ratings yet
- Handout 5 - Introduction to Smith ChartDocument10 pagesHandout 5 - Introduction to Smith Chartkiprotich allanNo ratings yet
- FourierseriesDocument13 pagesFourierseriesSuhaimi SulaimanNo ratings yet
- CT203: Signals & Systems Tutorial 13 - Laplace Transform and SamplingDocument2 pagesCT203: Signals & Systems Tutorial 13 - Laplace Transform and SamplingKiruba KNo ratings yet
- Transmission Lines: 1 Single Transmission-Line EquationsDocument5 pagesTransmission Lines: 1 Single Transmission-Line EquationsIoan TudosaNo ratings yet
- BTS-tV Complex Variables and PDEs April 2019 ExamDocument2 pagesBTS-tV Complex Variables and PDEs April 2019 ExamAswin AswinNo ratings yet
- GCL 06Document26 pagesGCL 06sahanishubham317No ratings yet
- Clase Lugar Geometrico de Las Raices IDocument32 pagesClase Lugar Geometrico de Las Raices IJesus Tapia GallardoNo ratings yet
- Designcon2012 Lecroy S-Parameters Discrete Frequency Continuous Response PDFDocument28 pagesDesigncon2012 Lecroy S-Parameters Discrete Frequency Continuous Response PDFsalehNo ratings yet
- Brune SynthesisDocument7 pagesBrune SynthesisPranjal RaiNo ratings yet
- EECS4421Z Robotics Exam QuestionsDocument7 pagesEECS4421Z Robotics Exam QuestionsMooeez BellaamineNo ratings yet
- Calculation of Time-Dependent Phenomena On A Transmission LineDocument8 pagesCalculation of Time-Dependent Phenomena On A Transmission LineBence SzabóNo ratings yet
- W02 Vector CalculusDocument7 pagesW02 Vector CalculusPruthvi NinganurNo ratings yet
- Bifurcation in A Model of The PopulationDocument10 pagesBifurcation in A Model of The PopulationRaluca GeorgescuNo ratings yet
- 6.003 Homework 3: ProblemsDocument4 pages6.003 Homework 3: ProblemsIsrael SmithNo ratings yet
- 12-11-14 - SedraSmith6e Appendix FDocument7 pages12-11-14 - SedraSmith6e Appendix FRoshdy AbdelRassoulNo ratings yet
- Lect2 AgmDocument63 pagesLect2 AgmShu Shujaat LinNo ratings yet
- Téoria EIS - 1Document29 pagesTéoria EIS - 1Rosario Pilar De La Cruz CastellanosNo ratings yet
- Lecture 7. Mechanical OscillationDocument5 pagesLecture 7. Mechanical OscillationParatus AlcántaraNo ratings yet
- 8 X TransferDocument12 pages8 X TransferTaku Angwa Otto CHENo ratings yet
- 03.1the Asymptotic Bode Diagram For Non-Minimum Phase Poles and ZerosDocument6 pages03.1the Asymptotic Bode Diagram For Non-Minimum Phase Poles and ZerosYang CaoNo ratings yet
- Chapter 8 HW Solution: Review QuestionsDocument11 pagesChapter 8 HW Solution: Review QuestionsAsseel FleihanNo ratings yet
- Electronics 09 02009Document12 pagesElectronics 09 02009abrham simenehNo ratings yet
- Lecture4 Lin Anal.5529.1439479561Document54 pagesLecture4 Lin Anal.5529.1439479561NananN KornkamolNo ratings yet
- Problems and SolutionsDocument71 pagesProblems and SolutionsBogdan BlidaruNo ratings yet
- Thanks To Yossef and Shiang Yong For Their Input in This ProblemDocument8 pagesThanks To Yossef and Shiang Yong For Their Input in This ProblemIgnacio JuárezNo ratings yet
- Laplace Fourier RelationshipDocument17 pagesLaplace Fourier Relationshipnakasob100% (8)
- Consistent Superstrings: We Have Found Three Tachyon Free and Non-Anomalous Superstring TheoriesDocument55 pagesConsistent Superstrings: We Have Found Three Tachyon Free and Non-Anomalous Superstring TheoriesEvelinaNo ratings yet
- MATH1052 Problem Sheet 6Document2 pagesMATH1052 Problem Sheet 6clearcastingNo ratings yet
- Department of Mathematics University of Petroleum & Energy Studies Assignment-IDocument2 pagesDepartment of Mathematics University of Petroleum & Energy Studies Assignment-Iananthu.uNo ratings yet
- 3-Lossless Line, Solving problems-05-Dec-2019Material - I - 05-Dec-2019 - Module-1-2Document24 pages3-Lossless Line, Solving problems-05-Dec-2019Material - I - 05-Dec-2019 - Module-1-2Haren ShylakNo ratings yet
- Solution Problem 5Document5 pagesSolution Problem 5DeVillersSeciNo ratings yet
- Signal and System Lecture 21Document22 pagesSignal and System Lecture 21ali_rehman87No ratings yet
- Lecture 3Document5 pagesLecture 3nakulNo ratings yet
- The Jacobian and Change of VariablesDocument6 pagesThe Jacobian and Change of VariablesnahuacevedoNo ratings yet
- 2-Equivalent Circuit For A Transmission line-04-Dec-2019Material - I - 04-Dec-2019 - Module-1 - 1Document16 pages2-Equivalent Circuit For A Transmission line-04-Dec-2019Material - I - 04-Dec-2019 - Module-1 - 1Haren ShylakNo ratings yet
- Hamiltonian Mechanics Table of ContentsDocument17 pagesHamiltonian Mechanics Table of ContentsSergio PalaciosNo ratings yet
- Two Pole Two Zero Root LocusDocument3 pagesTwo Pole Two Zero Root Locuskrish104411No ratings yet
- T XXX X X YyDocument28 pagesT XXX X X YyUrsula GuinNo ratings yet
- The Distortionless Transmission Line in The Time Domain: Kenneth H. Carpenter November 18, 1998Document5 pagesThe Distortionless Transmission Line in The Time Domain: Kenneth H. Carpenter November 18, 1998Rishi KrishhNo ratings yet
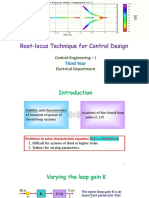
- Root-Locus Technique For Control Design: Third YearDocument48 pagesRoot-Locus Technique For Control Design: Third YearHassan Al BaityNo ratings yet
- SLE AT2003preprintDocument12 pagesSLE AT2003preprintHuong Cam ThuyNo ratings yet
- Second Order TransientsDocument6 pagesSecond Order Transientsmusy1233No ratings yet
- Chapter - 7c Directivity IndexDocument12 pagesChapter - 7c Directivity IndexAlinaBogoiNo ratings yet
- Chapter 7 Ac CircuitsDocument23 pagesChapter 7 Ac CircuitsAkmal Hakim Bin IdrisNo ratings yet
- Folha 2 (5.)Document7 pagesFolha 2 (5.)Joao FernandesNo ratings yet
- Handbook Lifts Used During Evacuation 2013 PDFDocument102 pagesHandbook Lifts Used During Evacuation 2013 PDFtrickersniperNo ratings yet
- Lubrication and Elevator RopesDocument7 pagesLubrication and Elevator RopesRui Miguel Salvador100% (1)
- Maxton Catalog and Tech SheetsDocument102 pagesMaxton Catalog and Tech SheetsReza KühnNo ratings yet
- Calendar Jan 23Document1 pageCalendar Jan 23Reza KühnNo ratings yet
- Motor Drive and Control: Learning ObjectivesDocument8 pagesMotor Drive and Control: Learning ObjectivesReza KühnNo ratings yet
- SB Z 003611 en 01Document6 pagesSB Z 003611 en 01rewmarineNo ratings yet
- Three-Phase Induction Motors: Installation & MaintenanceDocument52 pagesThree-Phase Induction Motors: Installation & MaintenanceraihanNo ratings yet
- Emergency Lighting Backup SystemsDocument6 pagesEmergency Lighting Backup SystemsReza KühnNo ratings yet
- Australian Elevator Association Handbook 2015 PDFDocument24 pagesAustralian Elevator Association Handbook 2015 PDFSamson Rajan BabuNo ratings yet
- T G RS-485: Roubleshooting Uide ForDocument4 pagesT G RS-485: Roubleshooting Uide ForMaki MoammerNo ratings yet
- Mitd1 PDFDocument4 pagesMitd1 PDFwizaarzNo ratings yet
- Handbook Lifts Used During Evacuation 2013 PDFDocument102 pagesHandbook Lifts Used During Evacuation 2013 PDFtrickersniperNo ratings yet
- Australian Elevator Association Handbook 2015 PDFDocument24 pagesAustralian Elevator Association Handbook 2015 PDFSamson Rajan BabuNo ratings yet
- Nexans Olex TPL September2013Document16 pagesNexans Olex TPL September2013Reza KühnNo ratings yet
- Guia de Seleccion Baldor para ElevacionDocument54 pagesGuia de Seleccion Baldor para ElevacionJesus MontesNo ratings yet
- Mini J7 English Catalogue (YEG-CHE-S606-12D)Document4 pagesMini J7 English Catalogue (YEG-CHE-S606-12D)Reza KühnNo ratings yet
- Ethernet BasicsDocument5 pagesEthernet Basicstimmyaball100% (2)
- 4-20 Ma. Cálculo de Distancia MáximaDocument3 pages4-20 Ma. Cálculo de Distancia MáximaMarco Antonio Arroyo RiveraNo ratings yet
- DC TESLA COIL Construction and ApplicationsDocument7 pagesDC TESLA COIL Construction and ApplicationsReza KühnNo ratings yet
- Tutorial On Fuzzy LogicDocument20 pagesTutorial On Fuzzy LogicnsadnanNo ratings yet
- Using MODBUS For ProcessDocument7 pagesUsing MODBUS For ProcessjosethompsonNo ratings yet
- Introduction To MODBUS: Technical TutorialDocument10 pagesIntroduction To MODBUS: Technical TutorialUzzal Roy100% (1)
- Design of Fuzzy ControllersDocument27 pagesDesign of Fuzzy ControllerssayedmhNo ratings yet
- Current Loop TutorialDocument13 pagesCurrent Loop TutorialNAVEED100% (2)
- Steps To Secure Control SystemDocument7 pagesSteps To Secure Control SystemDelia DogaruNo ratings yet
- Control Fundamentals: Terminology and SymbolsDocument28 pagesControl Fundamentals: Terminology and Symbolsm_holbornNo ratings yet
- Temperature Controller Methods GuideDocument33 pagesTemperature Controller Methods GuideGovindaraju MariyappanNo ratings yet
- Pid ControlDocument13 pagesPid ControlKhalil AhmadNo ratings yet
- Current Loop TutorialDocument13 pagesCurrent Loop TutorialNAVEED100% (2)
- HPRGSUser GuideDocument112 pagesHPRGSUser GuideBoopala KrishnanNo ratings yet
- Anybus Communicator Profinet With Siemens s7 1500 PLC Tia Portal PDFDocument16 pagesAnybus Communicator Profinet With Siemens s7 1500 PLC Tia Portal PDFrguzmanabundisNo ratings yet
- Compressed Sensing System Considerations For ECG and EMG Wireless BiosensorsDocument18 pagesCompressed Sensing System Considerations For ECG and EMG Wireless BiosensorsMuhammad Fauzi D4 ElektromedikNo ratings yet
- Airbag Sensor Circuit DiagramDocument6 pagesAirbag Sensor Circuit DiagramSungkur NishanNo ratings yet
- User Guide Indu SoftDocument0 pagesUser Guide Indu SoftJoseNo ratings yet
- LogDocument7 pagesLogKenneth Charles RigonanNo ratings yet
- JD Edwards Enterpriseone Tools: Form Design Aid Guide Release 9.1.XDocument530 pagesJD Edwards Enterpriseone Tools: Form Design Aid Guide Release 9.1.XGaurav SahuNo ratings yet
- Ax2012 Enus Deviii 05Document16 pagesAx2012 Enus Deviii 05JoeNo ratings yet
- FLR 12 ACC NT 5 Display Diagnostic InformationDocument257 pagesFLR 12 ACC NT 5 Display Diagnostic InformationSagar GheewalaNo ratings yet
- Helmet Recording System ANPVS-15-18Document2 pagesHelmet Recording System ANPVS-15-18Mrco BentesNo ratings yet
- Brew ManualDocument37 pagesBrew ManualPatrick JerryNo ratings yet
- Integrated Circuits For Audio Power AmplifiersDocument6 pagesIntegrated Circuits For Audio Power Amplifiershectormv22No ratings yet
- Client InformationDocument24 pagesClient InformationBav JhiteNo ratings yet
- Integrity Lifecycle Manager 12 Product Platforms PDFDocument3 pagesIntegrity Lifecycle Manager 12 Product Platforms PDFBinesh KumarNo ratings yet
- HP Storeonce 2700, 2900, 4500 and 4700 Backup System: Installation and Configuration GuideDocument130 pagesHP Storeonce 2700, 2900, 4500 and 4700 Backup System: Installation and Configuration GuideMikel RichieNo ratings yet
- FactoryTalk View Site Edition Version 12 (CPR9 SR12) Design ConsiderationsDocument70 pagesFactoryTalk View Site Edition Version 12 (CPR9 SR12) Design ConsiderationsrodriggoguedesNo ratings yet
- CTS Zamboanga City Library Management SystemDocument204 pagesCTS Zamboanga City Library Management SystemJohn Paul MadroñalNo ratings yet
- Technical Specification For Fire Alarm System of ARPFDocument28 pagesTechnical Specification For Fire Alarm System of ARPFAnbarasu PonnuchamyNo ratings yet
- Online Hostel Management SystemDocument47 pagesOnline Hostel Management SystemOgidiolu Temitope Ebenezer67% (3)
- Network Print Monitor User Guide enDocument94 pagesNetwork Print Monitor User Guide enخالد عبادىNo ratings yet
- Compal Confidential: EA50 - HW M/B Schematics DocumentDocument51 pagesCompal Confidential: EA50 - HW M/B Schematics DocumentАнтон ФедоровNo ratings yet
- PDF document-4588E141BC5B-1Document39 pagesPDF document-4588E141BC5B-1Althaf AsharafNo ratings yet
- Fog Computing: Survey of Trends, Architectures, Requirements, and Research DirectionsDocument31 pagesFog Computing: Survey of Trends, Architectures, Requirements, and Research DirectionsNelli HarshithaNo ratings yet
- Siwarex Cs Quick Guide v4 0Document19 pagesSiwarex Cs Quick Guide v4 0classic777No ratings yet
- FortiDeceptor-4.3.0-Threat Prevention and Detection With FortiDeceptorDocument108 pagesFortiDeceptor-4.3.0-Threat Prevention and Detection With FortiDeceptorAbogados DUARTENo ratings yet
- 4 - Chapter 3 Key ConceptsDocument6 pages4 - Chapter 3 Key ConceptsCloudKitNo ratings yet
- ASTRO UserguideDocument1,054 pagesASTRO UserguideMarwan Ahmed100% (1)
- ELP-715/703/713 (XGA) ELP-505/503 (SVGA) : Service ManualDocument110 pagesELP-715/703/713 (XGA) ELP-505/503 (SVGA) : Service Manualafranio batistaNo ratings yet
- 06 CSL38 Manual LDDocument68 pages06 CSL38 Manual LDSwathi N SudarshanNo ratings yet
- Ec8691 Unit Ii - PPTDocument44 pagesEc8691 Unit Ii - PPTVinothkumar UrumanNo ratings yet