You might also like
- Taza THE - SNOWMAN - MUGDocument25 pagesTaza THE - SNOWMAN - MUGCamila Serna91% (23)
- PHCUOR Scorecard 6Document154 pagesPHCUOR Scorecard 6Iyiola Daniel100% (1)
- Lecture-3.1 Heuristic SearchDocument131 pagesLecture-3.1 Heuristic SearchmusaNo ratings yet
- Foreclosure and Forcible Detainer Issues Brewer v. Bank of America, Fla. 17th Circuit 11004756Document55 pagesForeclosure and Forcible Detainer Issues Brewer v. Bank of America, Fla. 17th Circuit 11004756Roger Ross100% (6)
- Informed Search AlgorithmsDocument39 pagesInformed Search AlgorithmsmmminishaNo ratings yet
- AI Unit-2Document75 pagesAI Unit-2Zaidali 050No ratings yet
- Informed Search AlgorithmsDocument39 pagesInformed Search Algorithmsviraj guptaNo ratings yet
- 4.module3 INFORMED SEARCH 3Document48 pages4.module3 INFORMED SEARCH 3justadityabistNo ratings yet
- A.I.: Informed Search Algorithms: Chapter III: Part DeuxDocument35 pagesA.I.: Informed Search Algorithms: Chapter III: Part DeuxAriel AsunsionNo ratings yet
- Lec5 6Document35 pagesLec5 6MazharulislamNo ratings yet
- In From Ed SearchDocument24 pagesIn From Ed Searchapi-3854551No ratings yet
- Assignment # 06: Graph Search TechnquesDocument11 pagesAssignment # 06: Graph Search TechnquesAhmad MasoodNo ratings yet
- Heuristic SearchDocument50 pagesHeuristic SearchsahusandipanNo ratings yet
- Week 04 Lecture 03 PDFDocument68 pagesWeek 04 Lecture 03 PDFOsama AdeelNo ratings yet
- Artificial Intelligence Unit IVDocument105 pagesArtificial Intelligence Unit IVMuzzammilRashidWaniNo ratings yet
- L3 Search1 UninformedDocument72 pagesL3 Search1 UninformedAbdullah MostafaNo ratings yet
- Session 12 Informed Search Strategies (Heuristic Search Techniques) A Search (Minimizing The Total Estimated Solution Cost)Document33 pagesSession 12 Informed Search Strategies (Heuristic Search Techniques) A Search (Minimizing The Total Estimated Solution Cost)Markapuri Santhoash kumarNo ratings yet
- Search Algorithms in AIDocument19 pagesSearch Algorithms in AIMuzamil YousafNo ratings yet
- Mychapter 3 ADocument32 pagesMychapter 3 ARamesh Kumar YadavNo ratings yet
- Ai Unit 2Document29 pagesAi Unit 2Mayank RajNo ratings yet
- Lecture03 Informed SearchDocument41 pagesLecture03 Informed SearchRohan ZahidNo ratings yet
- M04-Heuristics Informed SearchDocument41 pagesM04-Heuristics Informed SearchchakravarthyashokNo ratings yet
- Informed Search PDFDocument45 pagesInformed Search PDFakakakaNo ratings yet
- Chapter 3Document87 pagesChapter 3helNo ratings yet
- Informed Search Algorithms: Team Teaching AI (Created by Dewi Liliana) PTIIK 2012Document41 pagesInformed Search Algorithms: Team Teaching AI (Created by Dewi Liliana) PTIIK 2012Shatria KaniputraNo ratings yet
- Introduction To Multi-Agent Programming: Search Algorithms and Path-FindingDocument49 pagesIntroduction To Multi-Agent Programming: Search Algorithms and Path-FindingAvs PavanNo ratings yet
- Graphs: by Sonia SoansDocument18 pagesGraphs: by Sonia SoanstvsnNo ratings yet
- SET394 - AI - Lecture 05 - Informed Search and Local Search AlgorithmsDocument33 pagesSET394 - AI - Lecture 05 - Informed Search and Local Search Algorithmsk7180566No ratings yet
- A Star AlgoDocument78 pagesA Star Algojiminisinbts02No ratings yet
- Session 5Document19 pagesSession 5Rohan GanjiNo ratings yet
- Graph Searching - JavaDocument32 pagesGraph Searching - Javamumaid258No ratings yet
- Lecture 08 Informed Search Strategies-IDocument45 pagesLecture 08 Informed Search Strategies-IHassan RazaNo ratings yet
- Lecture05 Informed Search (Part 1)Document26 pagesLecture05 Informed Search (Part 1)Dream MakerNo ratings yet
- CS 611 Slides 2Document28 pagesCS 611 Slides 2Ahmad AbubakarNo ratings yet
- Chapter 2 Problem SolvingDocument71 pagesChapter 2 Problem SolvingAshish PoudelNo ratings yet
- Lecture 5Document33 pagesLecture 5MrZaggyNo ratings yet
- Searching For SolutionsDocument28 pagesSearching For SolutionsSiju V SomanNo ratings yet
- Search Algorithms in AI4Document13 pagesSearch Algorithms in AI4jhn75070No ratings yet
- 3 Hueristic SearchDocument43 pages3 Hueristic Searchfahadabdulla011No ratings yet
- Lecture 10 11Document38 pagesLecture 10 11ALi SaLman RahatNo ratings yet
- 2014wq171 06 ReviewSearchDocument54 pages2014wq171 06 ReviewSearchexamsmrsptu2021No ratings yet
- FA17-BCS-027 LabDocument27 pagesFA17-BCS-027 Lab?No ratings yet
- Heuristic SearchDocument7 pagesHeuristic SearchKadali Lakshmi NirmalaNo ratings yet
- Lec05 Uninformed SearchDocument23 pagesLec05 Uninformed SearchpaksmilerNo ratings yet
- Lab Report: Department of Mechatronics & Control EngineeringDocument7 pagesLab Report: Department of Mechatronics & Control EngineeringFEALABREPORTSNo ratings yet
- Last Time: Breadth-First Search Solution Depth-First Search SolutionDocument86 pagesLast Time: Breadth-First Search Solution Depth-First Search SolutionJean-yves LapicqueNo ratings yet
- Artificial Intelligence-ch03-BDocument39 pagesArtificial Intelligence-ch03-BAhmad AbudaloNo ratings yet
- Discrete Structure PresentationDocument34 pagesDiscrete Structure PresentationFᴀsᴇᴇʜ̶ ʜ̶ᴀʀᴏᴏɴNo ratings yet
- 4 Uninformed Search Lecturer 4Document51 pages4 Uninformed Search Lecturer 4Ankita GuptaNo ratings yet
- Artificial Intelligence: Informed SearchDocument21 pagesArtificial Intelligence: Informed SearchDede Ari HidayatullohNo ratings yet
- Unit 2 SeachingDocument77 pagesUnit 2 SeachingUI19EC21 Talluri issakuNo ratings yet
- 3.2 Uninformed SearchDocument44 pages3.2 Uninformed Searchashish.rawatNo ratings yet
- Search Algorithms in Artificial IntelligenceDocument32 pagesSearch Algorithms in Artificial Intelligenceমোহাম্মদ রাহাত হাসানNo ratings yet
- AI Lec2Document43 pagesAI Lec2Asil Zulfiqar 4459-FBAS/BSCS4/F21No ratings yet
- Module 3. Solving Problems by Searching - 20230824 - 200318 - 0000Document15 pagesModule 3. Solving Problems by Searching - 20230824 - 200318 - 0000afrozbhati1111No ratings yet
- BFS and DFSDocument20 pagesBFS and DFSarshiya khanNo ratings yet
- 4 Informed Search and ExplorationDocument6 pages4 Informed Search and ExplorationI CETNo ratings yet
- Artificial Intelligence: Informed Search and ExplorationDocument52 pagesArtificial Intelligence: Informed Search and ExplorationVarun YadavNo ratings yet
- Graph Traversal Algorithm: RecapitulationDocument14 pagesGraph Traversal Algorithm: RecapitulationamukhopadhyayNo ratings yet
- Uninformed Search TechqDocument28 pagesUninformed Search Techqvinay saiNo ratings yet
- DR Zafar Alvi. - Text Book - Aritificial Intelligence Illuminated by Ben Coppin, Narosa Publishers. - Ref BooksDocument23 pagesDR Zafar Alvi. - Text Book - Aritificial Intelligence Illuminated by Ben Coppin, Narosa Publishers. - Ref BooksAreej EhsanNo ratings yet
- Week 04 Lecture 01Document35 pagesWeek 04 Lecture 01Osama AdeelNo ratings yet
- Week 03 Lecture 01Document14 pagesWeek 03 Lecture 01Osama AdeelNo ratings yet
- Week 04 Lecture 03 PDFDocument68 pagesWeek 04 Lecture 03 PDFOsama AdeelNo ratings yet
- Week 02 Lecture 01Document33 pagesWeek 02 Lecture 01Osama AdeelNo ratings yet
- Week 05 Lecture 01: Informed SearchesDocument27 pagesWeek 05 Lecture 01: Informed SearchesOsama AdeelNo ratings yet
- Week 01 Lecture 02Document29 pagesWeek 01 Lecture 02Osama AdeelNo ratings yet
- Week 04 Lecture 02Document9 pagesWeek 04 Lecture 02Osama AdeelNo ratings yet
- Week 01 Lecture 01Document21 pagesWeek 01 Lecture 01Osama AdeelNo ratings yet
- AStarDocument125 pagesAStarOsama AdeelNo ratings yet
- " Retraction of Jose P. Rizal ": Taguig City University College of CriminologyDocument4 pages" Retraction of Jose P. Rizal ": Taguig City University College of CriminologyMica MellizoNo ratings yet
- Body Language and GesturesDocument3 pagesBody Language and GesturesGel BalaNo ratings yet
- Ucsp QuizDocument1 pageUcsp QuizMyra Dacquil AlingodNo ratings yet
- Concept Map For Netflix PP33Document3 pagesConcept Map For Netflix PP33JOHN WAMBUANo ratings yet
- Scrip Game Online, Browsing Sosmed, Youtube, Download Scrip by Ega Chanel V.4.5Document38 pagesScrip Game Online, Browsing Sosmed, Youtube, Download Scrip by Ega Chanel V.4.5abdur rohmanNo ratings yet
- The Curacao Experiment The Whole Island JumpedDocument2 pagesThe Curacao Experiment The Whole Island JumpedvyyleNo ratings yet
- Policy AnalysisDocument40 pagesPolicy AnalysisshkadryNo ratings yet
- Yes To Death PenaltyDocument7 pagesYes To Death PenaltyJan IcejimenezNo ratings yet
- Duet (Feat Stephanie Briggs) Full SheetDocument6 pagesDuet (Feat Stephanie Briggs) Full SheetAndrea Nortje100% (1)
- ChocolateDocument6 pagesChocolateKunal NairNo ratings yet
- Crime and Criminal Tracking Network System: Case StudyDocument2 pagesCrime and Criminal Tracking Network System: Case StudyMushtaq AhmadNo ratings yet
- Aiatsl: (Wholly Owned Subsidiary of Air India Limited)Document1 pageAiatsl: (Wholly Owned Subsidiary of Air India Limited)Ashna anilkumar pNo ratings yet
- Industry ReviewDocument22 pagesIndustry ReviewBALAJI MNo ratings yet
- HCP9982 Battery Sensor Bypass Device: Installation Instruction SheetDocument4 pagesHCP9982 Battery Sensor Bypass Device: Installation Instruction SheetWaltteri LehtinenNo ratings yet
- Digitization DigitalizationDocument1 pageDigitization Digitalizationace espinosaNo ratings yet
- Chapter 8 - Between-Subjects DesignDocument17 pagesChapter 8 - Between-Subjects DesignSumendra RathoreNo ratings yet
- Acquisition of PP&E Acquisition of PP&EDocument20 pagesAcquisition of PP&E Acquisition of PP&EbereniceNo ratings yet
- Winning EssaysDocument66 pagesWinning EssaysŠąłm ĄńNo ratings yet
- Pre-RMO Test Series - Test 1: Pre-Regional Mathematical OlympiadDocument3 pagesPre-RMO Test Series - Test 1: Pre-Regional Mathematical OlympiadAyush KumarNo ratings yet
- Hacking The Human Biofield: The Four Winds SocietyDocument5 pagesHacking The Human Biofield: The Four Winds SocietyFelipe TanakaNo ratings yet
- Klamer Moro (Eds.) 2023 Traces of Contact in The LexiconDocument452 pagesKlamer Moro (Eds.) 2023 Traces of Contact in The LexiconIker SalaberriNo ratings yet
- Ip CameraDocument2 pagesIp CameraRaghavendar Reddy BobbalaNo ratings yet
- Uls Core Value: SolidarityDocument5 pagesUls Core Value: SolidarityKeith CaboteNo ratings yet
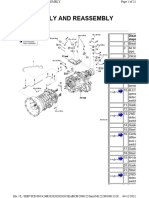
- Disassembly and Reassembly: Disas StepsDocument21 pagesDisassembly and Reassembly: Disas StepsNishanth BenedictNo ratings yet
- 6th Travel Project BrochureDocument6 pages6th Travel Project Brochureapi-245416746No ratings yet
- Online News SystemDocument3 pagesOnline News Systemايوب كريريNo ratings yet
- Active Directory Objects (Ou, Users and Groups) : Cblms On Computer System Servicing NC Ii Setup ServerDocument27 pagesActive Directory Objects (Ou, Users and Groups) : Cblms On Computer System Servicing NC Ii Setup ServerJdkfNo ratings yet