You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Properties of The Wave Equation On RDocument12 pagesProperties of The Wave Equation On RElohim Ortiz CaballeroNo ratings yet
- Brownian Motion and The Heat Equation: Denis Bell University of North FloridaDocument14 pagesBrownian Motion and The Heat Equation: Denis Bell University of North FloridaThuy Tran Dinh VinhNo ratings yet
- Chap1 PDFDocument25 pagesChap1 PDFDyl NicollNo ratings yet
- 1 Transverse Vibration of A Taut String: 1.138J/2.062J/18.376J, WAVE PROPAGATIONDocument4 pages1 Transverse Vibration of A Taut String: 1.138J/2.062J/18.376J, WAVE PROPAGATIONabolfazl sanchoolyNo ratings yet
- CS1 NotesDocument27 pagesCS1 NoteswallhumedxxNo ratings yet
- 0054 Handout 5Document8 pages0054 Handout 5zcaptNo ratings yet
- QK Contacts With Non-Informed People. at Time T, It Is: DT N NDocument15 pagesQK Contacts With Non-Informed People. at Time T, It Is: DT N NAnonymous 3J1EvGNo ratings yet
- Classical Mechanics Lecture 10 NotesDocument2 pagesClassical Mechanics Lecture 10 Notesbgiangre8372No ratings yet
- This Is The Standard Lorentz Transformation Applied To The 4-Vector Differential DV, With DV The Space Conponent and DV The Time PartDocument9 pagesThis Is The Standard Lorentz Transformation Applied To The 4-Vector Differential DV, With DV The Space Conponent and DV The Time PartPraveen Dennis XavierNo ratings yet
- 000014Document2 pages000014wiertrass2016No ratings yet
- Wave EquationDocument18 pagesWave EquationBibekNo ratings yet
- Evans PDE Solution Chapter 5 SobolevDocument8 pagesEvans PDE Solution Chapter 5 SobolevHazard100% (1)
- Lecture9 ImpedanceDocument10 pagesLecture9 ImpedanceYimy GarciaNo ratings yet
- Foundations of Chemical Kinetics Kramers Theory: Marc R. Roussel Department of Chemistry and BiochemistryDocument17 pagesFoundations of Chemical Kinetics Kramers Theory: Marc R. Roussel Department of Chemistry and BiochemistrySukumar PaniNo ratings yet
- Brown Ian MotionDocument19 pagesBrown Ian MotionRuiwei JiNo ratings yet
- Introduction to Stochastic Processes: Compound and Marked Poisson ProcessesDocument18 pagesIntroduction to Stochastic Processes: Compound and Marked Poisson ProcessesStephen Jun VillejoNo ratings yet
- 1 Brownian Motion and The Langevin Equa-Tion: 1.1 DerivationDocument6 pages1 Brownian Motion and The Langevin Equa-Tion: 1.1 DerivationIrhamNo ratings yet
- Kinematics DynamicsDocument104 pagesKinematics DynamicsNadiaa AdjoviNo ratings yet
- BrownianMotionCurrent PDFDocument21 pagesBrownianMotionCurrent PDFClaudia CristinaNo ratings yet
- Signal Transmission in Loss-Less Transmission-Lines: 1 A Transmission-Line ModelDocument7 pagesSignal Transmission in Loss-Less Transmission-Lines: 1 A Transmission-Line ModelPratik KamatNo ratings yet
- Vibration and Noise LectureDocument4 pagesVibration and Noise LectureYemukelaniNo ratings yet
- 20122013assignment - 6.pdf 2012/2013 (Assignment 6) : TU Delft - Offshore & Dredging Engineering - Structural DynamicsDocument6 pages20122013assignment - 6.pdf 2012/2013 (Assignment 6) : TU Delft - Offshore & Dredging Engineering - Structural DynamicsShashank BabuNo ratings yet
- Dynamical Systems: An LTCC CourseDocument53 pagesDynamical Systems: An LTCC CourseRoy VeseyNo ratings yet
- 1 Lorentz Invariance and QM: 1 dX (τ) dτ dX (τ) dτ 0Document5 pages1 Lorentz Invariance and QM: 1 dX (τ) dτ dX (τ) dτ 0joshua7312No ratings yet
- Equation of Motion for Oscillations of a Hanging ChainDocument5 pagesEquation of Motion for Oscillations of a Hanging ChainEsteban BellizziaNo ratings yet
- Sturm-Liouville Theory: Dr. Krunal M. GangawaneDocument24 pagesSturm-Liouville Theory: Dr. Krunal M. GangawaneKrunal GangawaneNo ratings yet
- General Forced ResponseDocument19 pagesGeneral Forced ResponseSalman HadiNo ratings yet
- Equation of Motion for Oscillations of a Hanging ChainDocument5 pagesEquation of Motion for Oscillations of a Hanging ChainKirti SaharanNo ratings yet
- Theorem 4 1Document1 pageTheorem 4 1Laucel MuñozNo ratings yet
- Stochastic Analysis in Finance IIDocument16 pagesStochastic Analysis in Finance IItrols sadNo ratings yet
- ECE1004 Laplace Transform GuideDocument7 pagesECE1004 Laplace Transform GuideHARJAP DANDIWALNo ratings yet
- 1 The Navier-Stokes EquationsDocument14 pages1 The Navier-Stokes EquationsMeer Mustafa AliNo ratings yet
- Convolution Representation of Linear Time - Invariant Continuous - Time SystemsDocument9 pagesConvolution Representation of Linear Time - Invariant Continuous - Time SystemsMostafa M. SamiNo ratings yet
- Chapter6Document48 pagesChapter6Cristian LopezNo ratings yet
- Spring 2005 SolutionsDocument11 pagesSpring 2005 SolutionsÖzge TüncelNo ratings yet
- Pde CaracteristicasDocument26 pagesPde CaracteristicasAnonymous Vd26Pzpx80No ratings yet
- Fourier Transform and Pulses LabDocument9 pagesFourier Transform and Pulses LabKthiha CnNo ratings yet
- HW - 2 Solutions (Draft)Document6 pagesHW - 2 Solutions (Draft)Hamid RasulNo ratings yet
- Some Applications of The Poisson ProcessDocument8 pagesSome Applications of The Poisson ProcessdanielNo ratings yet
- 4 - Flows - and - Lie - DerivativesDocument14 pages4 - Flows - and - Lie - DerivativesLuigi Teixeira de SousaNo ratings yet
- Dyson SeriesDocument25 pagesDyson SeriesNeymar MessiNo ratings yet
- Deriving the Wave Equation from Newton's LawsDocument2 pagesDeriving the Wave Equation from Newton's LawsOmaar Mustaine RattleheadNo ratings yet
- Chapter 5Document9 pagesChapter 5Luis Alberto FuentesNo ratings yet
- Ejercicios Con Una Formula RaraDocument23 pagesEjercicios Con Una Formula RaraDavid NiceDethNo ratings yet
- Picard's Theorem ExplainedDocument4 pagesPicard's Theorem ExplainedRapaza FotolicaNo ratings yet
- Param SummaryDocument5 pagesParam Summarynajek81No ratings yet
- Vibrations of Single Degree of Freedom Systems: M X (T) F (T) KDocument25 pagesVibrations of Single Degree of Freedom Systems: M X (T) F (T) KIbraheem OlugbadeNo ratings yet
- 5.1. Derivation of The Wave EquationDocument21 pages5.1. Derivation of The Wave EquationAlejandro RodriguezNo ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- Attractors of Ordinary Differential Equations: E. V. VoskresenskiiDocument14 pagesAttractors of Ordinary Differential Equations: E. V. VoskresenskiiAntonio Torres PeñaNo ratings yet
- W3 L1 Slides PDFDocument13 pagesW3 L1 Slides PDFYeison Fabian Fernández MarinNo ratings yet
- FluidmechanicsDocument62 pagesFluidmechanicsNadiaa AdjoviNo ratings yet
- Essay DraftDocument6 pagesEssay DraftEdgars VītiņšNo ratings yet
- Mathematical Modeling with PDEs (MAMME) List of Exercises #1Document3 pagesMathematical Modeling with PDEs (MAMME) List of Exercises #1KlaudiaNo ratings yet
- Study Unit 2Document15 pagesStudy Unit 2Gontse SempaNo ratings yet
- Exam 2 Cheat SheetDocument3 pagesExam 2 Cheat SheetMac JonesNo ratings yet
- Lecture 6Document8 pagesLecture 6ranvNo ratings yet
- Exercise 12: XX X XX XDocument1 pageExercise 12: XX X XX Xhoney fatimaNo ratings yet
- Boukas - Stochastic Switching Systems - Analysis and DesignDocument413 pagesBoukas - Stochastic Switching Systems - Analysis and Designxi shengNo ratings yet
- Dynamical Behavior of Competing Species EquationsDocument3 pagesDynamical Behavior of Competing Species Equationsxi shengNo ratings yet
- An Exact Analytical Solution of Kepler's EquationDocument11 pagesAn Exact Analytical Solution of Kepler's Equationxi shengNo ratings yet
- A Multiplicative Ergodic Theorem For Rotation NumbersDocument25 pagesA Multiplicative Ergodic Theorem For Rotation Numbersxi shengNo ratings yet
- Stochastic Processes Notes on Markov Chains and Infinitesimal GeneratorsDocument3 pagesStochastic Processes Notes on Markov Chains and Infinitesimal Generatorsxi shengNo ratings yet
- MCQ - Slope and Deflection - ME Subjects - Concepts SimplifiedDocument6 pagesMCQ - Slope and Deflection - ME Subjects - Concepts SimplifiedrajkumarNo ratings yet
- AP Chemistry - Trends in The Periodic TableDocument3 pagesAP Chemistry - Trends in The Periodic Tableilias1973No ratings yet
- Chapter 1-Gear SystemDocument27 pagesChapter 1-Gear SystemDanielRao100% (2)
- Effect of Earth On Capacitance of Transmission LineDocument3 pagesEffect of Earth On Capacitance of Transmission LineJorge Nelson100% (2)
- General Chemistry 1 Atoms, Molecules and Ions part 2Document37 pagesGeneral Chemistry 1 Atoms, Molecules and Ions part 2Seth CapellanNo ratings yet
- Ant DiagDocument6 pagesAnt DiagbigdrsmithNo ratings yet
- Electrostatics CWDocument3 pagesElectrostatics CWSiddhesh KultheNo ratings yet
- ST 1 MarksDocument15 pagesST 1 Marksashok pradhanNo ratings yet
- Mathcad Regression SolutionDocument14 pagesMathcad Regression SolutionWelsinsin Kevin SinNo ratings yet
- Lecture 1Document37 pagesLecture 1Alberto GallottiniNo ratings yet
- Air BearingDocument3 pagesAir Bearingjoshibec50% (2)
- Mohr's Circle Analysis of Rock Failure Under StressDocument26 pagesMohr's Circle Analysis of Rock Failure Under StressNitishNo ratings yet
- Review Questions and ProblemsDocument6 pagesReview Questions and ProblemsCarlo GaliciaNo ratings yet
- Control Active & Reactive Power in Distributed Generation & MicrogridsDocument23 pagesControl Active & Reactive Power in Distributed Generation & MicrogridsSumeet MehardaNo ratings yet
- Molecular Orbital Description of the CO LigandDocument20 pagesMolecular Orbital Description of the CO LigandMa. Salma Kirsten CayabyabNo ratings yet
- Pharmaceutical AnalysisDocument24 pagesPharmaceutical AnalysisluyawinNo ratings yet
- Experiment: Major Loss in Pipe: ObjectiveDocument14 pagesExperiment: Major Loss in Pipe: Objectivetesfa negaNo ratings yet
- Topographic Map Reading GuideDocument21 pagesTopographic Map Reading GuidegopeNo ratings yet
- Advanced Mineralogy Vol. 3Document343 pagesAdvanced Mineralogy Vol. 3Violeta Reyes OrozcoNo ratings yet
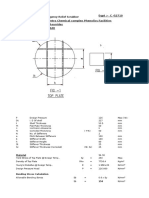
- Design of Flat Head For HydrotestDocument12 pagesDesign of Flat Head For HydrotestSAGARNo ratings yet
- ANTENNAS: Essential Concepts ExplainedDocument153 pagesANTENNAS: Essential Concepts Explainedmc chesterNo ratings yet
- 3 Fundamentals of CNC Programming I (CNC Course CD)Document38 pages3 Fundamentals of CNC Programming I (CNC Course CD)Jimmy RodriguezNo ratings yet
- Angew Chem Int Ed - 2009 - Wang - Icon of Chemistry The Periodic System of Chemical Elements in The New CenturyDocument12 pagesAngew Chem Int Ed - 2009 - Wang - Icon of Chemistry The Periodic System of Chemical Elements in The New CenturyAitor PastorNo ratings yet
- X-Ray Fluorescence - C MillerDocument24 pagesX-Ray Fluorescence - C MillerRodrigo AndradeNo ratings yet
- Amorphous PolymerDocument14 pagesAmorphous PolymerWahyu SulistyoNo ratings yet
- MSBSHSE Class 12 Maths Question Paper Solutions 2019Document20 pagesMSBSHSE Class 12 Maths Question Paper Solutions 2019ChahakNo ratings yet
- Electromagnetics Experiments Using MATLABDocument99 pagesElectromagnetics Experiments Using MATLABBewnet GetachewNo ratings yet
- 9701 - May June 2010 All Mark Schemes PDFDocument95 pages9701 - May June 2010 All Mark Schemes PDFMobeenHashmiNo ratings yet
- What Does The Label The BatteryDocument3 pagesWhat Does The Label The BatterypendekarpendawoNo ratings yet
- Fourier Series - Brilliant Math & Science WikiDocument6 pagesFourier Series - Brilliant Math & Science WikiswadhinNo ratings yet