You might also like
- DC80D MK3 Genset Controller User Manual V1.1Document37 pagesDC80D MK3 Genset Controller User Manual V1.1nathalie gonzelez100% (1)
- RAGAMSDocument4 pagesRAGAMSraviteja86No ratings yet
- Guidelines For Preventing Torsional Vibration Problems in Reciprocating Machinery PDFDocument48 pagesGuidelines For Preventing Torsional Vibration Problems in Reciprocating Machinery PDFredaNo ratings yet
- Sampling 180318081140Document29 pagesSampling 180318081140iqra javed100% (1)
- E 126 - 92 R98 Rteyng - PDFDocument6 pagesE 126 - 92 R98 Rteyng - PDFLuis Alberto Cristo GallegoNo ratings yet
- Implementation of Gabor Filter On FPGADocument5 pagesImplementation of Gabor Filter On FPGAfaruk1991No ratings yet
- (A9) Outdoor Autonomous Landing On A Moving Platform For Quadrotors Using An Omnidirecional Camera PDFDocument10 pages(A9) Outdoor Autonomous Landing On A Moving Platform For Quadrotors Using An Omnidirecional Camera PDFGiovanni GozziniNo ratings yet
- Type of VehicleDocument4 pagesType of Vehiclekaushik73No ratings yet
- A Vision-Based Algorithm For Landing Unmanned Aerial VehiclesDocument4 pagesA Vision-Based Algorithm For Landing Unmanned Aerial VehiclesSalman Ahmed KhanNo ratings yet
- Detection and Tracking of The Vanishing Point On A Horizon For Automotive ApplicationsDocument6 pagesDetection and Tracking of The Vanishing Point On A Horizon For Automotive ApplicationsMounir El MaghraouiNo ratings yet
- 1 s2.0 S1474667016427588 MainDocument6 pages1 s2.0 S1474667016427588 Mainkamaleshsampath.nittNo ratings yet
- Stairway Detection Based On Single Camera by Motion StereoDocument10 pagesStairway Detection Based On Single Camera by Motion StereoeProcurement Reviewer1No ratings yet
- Model Based Kalman Filter Mobil - Edouard IvanjkoDocument34 pagesModel Based Kalman Filter Mobil - Edouard Ivanjkonikolics.trashNo ratings yet
- Features Extraction Using A Gabor Filter FamilyDocument6 pagesFeatures Extraction Using A Gabor Filter FamilyJigme L. LepchaNo ratings yet
- Face Detection and Recognition Using Back Propagation Neural Network and Fourier Gabor FiltersDocument7 pagesFace Detection and Recognition Using Back Propagation Neural Network and Fourier Gabor FilterssipijNo ratings yet
- Object TrackDocument5 pagesObject TrackEngr EbiNo ratings yet
- Edge Detection Sobel De2 AlteraDocument4 pagesEdge Detection Sobel De2 AlteraParam UttarwarNo ratings yet
- Asift AsiftDocument11 pagesAsift AsiftHaris MasoodNo ratings yet
- Rotation Invariant Object Recognition From One Training ExampleDocument16 pagesRotation Invariant Object Recognition From One Training ExampleBatzorig MandakhbayarNo ratings yet
- Two-Stage Segmentation For Detection of Suspicious Objects in Aerial and Long-Range Surveillance ApplicationsDocument5 pagesTwo-Stage Segmentation For Detection of Suspicious Objects in Aerial and Long-Range Surveillance Applicationshrvoje80No ratings yet
- 3D Tracking and Classification System UsDocument24 pages3D Tracking and Classification System UsAlexandru MatasaruNo ratings yet
- A Proposed Model For Segmentation of Spot Images: KEY WORDS: Photogrammetry, Automation, Extraction, Fuzzy, ImageDocument3 pagesA Proposed Model For Segmentation of Spot Images: KEY WORDS: Photogrammetry, Automation, Extraction, Fuzzy, ImageKobalt von KriegerischbergNo ratings yet
- Image Segmentation - FullDocument4 pagesImage Segmentation - FullTJPRC PublicationsNo ratings yet
- Isprs Archives XLII 3 1773 2018Document4 pagesIsprs Archives XLII 3 1773 2018Amos GomesNo ratings yet
- Unit 4Document38 pagesUnit 4Ishani RoyNo ratings yet
- Texture SegmentationDocument18 pagesTexture SegmentationMutiaraMalikaPutriNo ratings yet
- A Fruit Recognition Technique Using Multiple Features and Artificial Neural NetworkDocument6 pagesA Fruit Recognition Technique Using Multiple Features and Artificial Neural NetworkEndalew SimieNo ratings yet
- Automatic Aircraft Recognition Using DSMT and HMMDocument8 pagesAutomatic Aircraft Recognition Using DSMT and HMMDon HassNo ratings yet
- A New Pedestrian Recognition System Based On Edge Detection and Different Census Transform Features Under Weather ConditionsDocument11 pagesA New Pedestrian Recognition System Based On Edge Detection and Different Census Transform Features Under Weather ConditionsIAES IJAINo ratings yet
- Desain Simulasi Gabor Filter PDFDocument7 pagesDesain Simulasi Gabor Filter PDFMurdoko RagilNo ratings yet
- Circle Marker Based Distance Measurement Using A Single CameraDocument5 pagesCircle Marker Based Distance Measurement Using A Single CameraMihai TudoseNo ratings yet
- Sonar Image Processing For Underwater Object Detection Based On High Resolution System PDFDocument6 pagesSonar Image Processing For Underwater Object Detection Based On High Resolution System PDFSrikanth VasamsettiNo ratings yet
- ECE - DIP - Unit 4Document43 pagesECE - DIP - Unit 4Maheswaran UmaiyorupaganNo ratings yet
- Chisti 2d Gabor FilterDocument17 pagesChisti 2d Gabor FilterChistiMonuNo ratings yet
- 5619-Research Instrument-14219-1-10-20181109Document10 pages5619-Research Instrument-14219-1-10-20181109Pham Duy AnNo ratings yet
- Multimode Foreground Detection Using Surf Algorithm: Abstract-Video Surveillance Is Active Research Topic inDocument4 pagesMultimode Foreground Detection Using Surf Algorithm: Abstract-Video Surveillance Is Active Research Topic inTechnos_IncNo ratings yet
- Visual-Inertial Fusion For Indoor Autonomous Navigation of A Quadrotor Using ORB-SLAMDocument6 pagesVisual-Inertial Fusion For Indoor Autonomous Navigation of A Quadrotor Using ORB-SLAMAdeeba AliNo ratings yet
- Gabor FilterDocument5 pagesGabor FilterInternational Journal of Computer and Communication System EngineeringNo ratings yet
- Human Motion Detection and Video Surveillance Using MATLAB: Sapana K. Mishra, Kanchan .S BhagatDocument4 pagesHuman Motion Detection and Video Surveillance Using MATLAB: Sapana K. Mishra, Kanchan .S BhagatRazvanHaragNo ratings yet
- Region Covariance Based Object Tracking Using Monte Carlo MethodDocument4 pagesRegion Covariance Based Object Tracking Using Monte Carlo MethodVasuhi SamyduraiNo ratings yet
- Towards Automated Lidar Boresight Self-CalibrationDocument6 pagesTowards Automated Lidar Boresight Self-CalibrationGlmNo ratings yet
- A Real-Time Vehicle Detection and Tracking System in Outdoor Traffic ScenesDocument4 pagesA Real-Time Vehicle Detection and Tracking System in Outdoor Traffic ScenesOnyinyeeh ChidolueNo ratings yet
- Realtime Autonomous Navigation in V-Rep Based Static and Dynamic Environment Using EKF-SLAMDocument12 pagesRealtime Autonomous Navigation in V-Rep Based Static and Dynamic Environment Using EKF-SLAMIAES International Journal of Robotics and AutomationNo ratings yet
- SSRN Id3575469Document11 pagesSSRN Id3575469kamaleshsampath.nittNo ratings yet
- Elementary Education Online Scopus FreeDocument7 pagesElementary Education Online Scopus FreeDOKKU LAKSHMI PAVANINo ratings yet
- Range Security System For Vehicle Navigation: M. URA ofDocument6 pagesRange Security System For Vehicle Navigation: M. URA ofmkollamNo ratings yet
- Is NN 2011 Gabor PyramidDocument9 pagesIs NN 2011 Gabor PyramidjallinexavierNo ratings yet
- Gait Recognition Based On Gabor Wavelets and (2D) 2PCADocument17 pagesGait Recognition Based On Gabor Wavelets and (2D) 2PCAUmm ShahadNo ratings yet
- Paper 11-Shape Prediction Linear Algorithm Using FuzzyDocument5 pagesPaper 11-Shape Prediction Linear Algorithm Using FuzzyEditor IJACSANo ratings yet
- An Evaluation of Camera Calibration MethDocument7 pagesAn Evaluation of Camera Calibration Methximena zeballosNo ratings yet
- Image Classification Using Wavelet Based Features For Image Retrieval ApplicationsDocument6 pagesImage Classification Using Wavelet Based Features For Image Retrieval ApplicationsVamsi KrishnaNo ratings yet
- Automatic Detection of Welding Defects Using Deep PDFDocument11 pagesAutomatic Detection of Welding Defects Using Deep PDFahmadNo ratings yet
- 3D Mapping and Navigation For Autonomous Quadrotor AircraftDocument6 pages3D Mapping and Navigation For Autonomous Quadrotor AircraftErvin DavilaNo ratings yet
- Traffic Sign Image Recognition Using Gabor Wavelet and Principle Component AnalysisDocument4 pagesTraffic Sign Image Recognition Using Gabor Wavelet and Principle Component AnalysisXIA3. Pinandhita Irfa' Abdul MuhannditsNo ratings yet
- Outdoor Robot Navigation Using Gmapping Based SLAM AlgorithmDocument6 pagesOutdoor Robot Navigation Using Gmapping Based SLAM AlgorithmfpasanfiverNo ratings yet
- Efficient Image RetrievalDocument14 pagesEfficient Image RetrievalMarchelius KalvinNo ratings yet
- Localization Data Fusion RobotinoDocument8 pagesLocalization Data Fusion RobotinoAlexandre RibeiroNo ratings yet
- Runway Detection and Tracking For UAV Based On Canny Algothm 2012Document4 pagesRunway Detection and Tracking For UAV Based On Canny Algothm 2012Sebastian Miguel Cáceres HuamánNo ratings yet
- Examplers Based Image Fusion Features For Face RecognitionDocument13 pagesExamplers Based Image Fusion Features For Face RecognitiondanangkitaNo ratings yet
- Pose Estimation For Isar Image ClassificationDocument4 pagesPose Estimation For Isar Image ClassificationDivine Grace BurmalNo ratings yet
- IJCSESDocument27 pagesIJCSESijcsesNo ratings yet
- 15arspc Submission 109Document9 pages15arspc Submission 109reneebartoloNo ratings yet
- A Position Based Visual Tracking System For A 7 DOF Robot Manipulator Using A Kinect CameraDocument7 pagesA Position Based Visual Tracking System For A 7 DOF Robot Manipulator Using A Kinect CameraMaitriya DamaniNo ratings yet
- Image, Video and 3D Data Registration: Medical, Satellite and Video Processing Applications with Quality MetricsFrom EverandImage, Video and 3D Data Registration: Medical, Satellite and Video Processing Applications with Quality MetricsNo ratings yet
- Standard and Super-Resolution Bioimaging Data Analysis: A PrimerFrom EverandStandard and Super-Resolution Bioimaging Data Analysis: A PrimerNo ratings yet
- Partnership ProblemsDocument23 pagesPartnership ProblemsTheanmozhi SNo ratings yet
- Height and DistanceDocument16 pagesHeight and DistanceTheanmozhi SNo ratings yet
- Alligation and MixtureDocument19 pagesAlligation and MixtureTheanmozhi SNo ratings yet
- Boats and StreamsDocument8 pagesBoats and StreamsTheanmozhi SNo ratings yet
- Ratio & PropositionDocument54 pagesRatio & PropositionTheanmozhi SNo ratings yet
- Percentage AptitudeDocument62 pagesPercentage AptitudeTheanmozhi SNo ratings yet
- Project Idea - Aircraft RecognitionDocument20 pagesProject Idea - Aircraft RecognitionTheanmozhi SNo ratings yet
- Hammond Padial Obstacle Classification and SegmentationDocument7 pagesHammond Padial Obstacle Classification and SegmentationTheanmozhi SNo ratings yet
- Lecture 21: April 17: 21.2.1 Data CentersDocument4 pagesLecture 21: April 17: 21.2.1 Data CentersTheanmozhi SNo ratings yet
- Computer Forensics IntroDocument41 pagesComputer Forensics IntroHitesh KadamNo ratings yet
- Profit and LossDocument30 pagesProfit and LossTheanmozhi SNo ratings yet
- 1151EC110MICROPROCESSORANDMICROCONTROLLERDocument3 pages1151EC110MICROPROCESSORANDMICROCONTROLLERTheanmozhi SNo ratings yet
- GeometryDocument34 pagesGeometryTheanmozhi SNo ratings yet
- Placement Book FR CompaniesDocument473 pagesPlacement Book FR Companieswilliam100% (2)
- Supply Chain Management - Note PDFDocument15 pagesSupply Chain Management - Note PDFelsonpaulNo ratings yet
- Service-Oriented Architecture - ConceptsDocument149 pagesService-Oriented Architecture - ConceptsThangavel MuruganNo ratings yet
- Compound InterestDocument24 pagesCompound InterestTheanmozhi SNo ratings yet
- Aircraft Recognition in Remote Sensing Images Based On Convolutional Neural NetworksDocument10 pagesAircraft Recognition in Remote Sensing Images Based On Convolutional Neural NetworksTheanmozhi SNo ratings yet
- Green ComputingDocument13 pagesGreen ComputingTheanmozhi SNo ratings yet
- 02 WholeDocument265 pages02 WholeTheanmozhi SNo ratings yet
- 16 CloudComputing PDFDocument63 pages16 CloudComputing PDFAndrew WalkerNo ratings yet
- Simple InterestDocument20 pagesSimple InterestTheanmozhi SNo ratings yet
- An Aircraft Detection Framework Based On ReinforceDocument19 pagesAn Aircraft Detection Framework Based On ReinforceTheanmozhi SNo ratings yet
- Unit 2 CS MCQDocument2 pagesUnit 2 CS MCQTheanmozhi SNo ratings yet
- Wireless Networks & Mobile Computing: Prof. Maria PapadopouliDocument62 pagesWireless Networks & Mobile Computing: Prof. Maria PapadopouliTheanmozhi SNo ratings yet
- Wireless Ad Hoc and Sensor Networks: Week 1Document2 pagesWireless Ad Hoc and Sensor Networks: Week 1Theanmozhi SNo ratings yet
- Image FilteringDocument8 pagesImage FilteringDenis Constantin Ilie-AblachimNo ratings yet
- Lesson 5 - Web DevelopmentDocument25 pagesLesson 5 - Web DevelopmentJoshua OmolewaNo ratings yet
- CH 01Document52 pagesCH 01Samar MasoodNo ratings yet
- List of Mathematical Symbols - Simple English Wikipedia, The Free EncyclopediaDocument6 pagesList of Mathematical Symbols - Simple English Wikipedia, The Free EncyclopediaRohit RajNo ratings yet
- Assignment 7.3: Double-Angle, Half-Angle, and Reduction FormulasDocument3 pagesAssignment 7.3: Double-Angle, Half-Angle, and Reduction FormulasCJG MusicNo ratings yet
- Verb Morphological Generator For TeluguDocument11 pagesVerb Morphological Generator For TeluguSasi Raja Sekhar DokkaraNo ratings yet
- SNMP Web Box Quick GuideDocument2 pagesSNMP Web Box Quick GuideLy Quoc VuNo ratings yet
- MQXUSBDEVAPIDocument32 pagesMQXUSBDEVAPIwonderxNo ratings yet
- Catalogo Familia PZ1000Document0 pagesCatalogo Familia PZ1000jjcanoolivaresNo ratings yet
- Titanic EdaDocument14 pagesTitanic EdaDeepak SemwalNo ratings yet
- PErformance TEstDocument13 pagesPErformance TEstPraveen ChoudharyNo ratings yet
- Calculating Index Values and PerformanceDocument5 pagesCalculating Index Values and Performancemuneebmateen01No ratings yet
- Water TreatmentDocument12 pagesWater TreatmentSata AjjamNo ratings yet
- Analysis of Cost Control, Time, and Quality On Construction ProjectDocument12 pagesAnalysis of Cost Control, Time, and Quality On Construction ProjectDeryta FlorentinusNo ratings yet
- MANUAL For IONIZING AIR BARDocument11 pagesMANUAL For IONIZING AIR BARGerardo BoisNo ratings yet
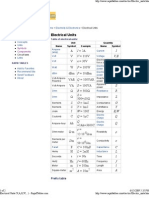
- Electrical UnitsDocument2 pagesElectrical Unitsevtoma100% (1)
- Model 4WI 100 - 800 HP Boilers: 1.4 SubmittalsDocument4 pagesModel 4WI 100 - 800 HP Boilers: 1.4 SubmittalssebaversaNo ratings yet
- Sae Summer KepsDocument6 pagesSae Summer KepsPritesh KumarNo ratings yet
- Topic 10: Electric Potential: Conceptual Physics Textbook, CPO Textbook, CP Lab Book and CPO LabDocument9 pagesTopic 10: Electric Potential: Conceptual Physics Textbook, CPO Textbook, CP Lab Book and CPO LabJoanne Pedrito GunanNo ratings yet
- C ProgramsDocument16 pagesC Programsvaishuraji2001No ratings yet
- LIS2sl - 0911 - en SIEMENS SLDocument456 pagesLIS2sl - 0911 - en SIEMENS SLAntonio VazquezNo ratings yet
- Practical 11: AIM: To Study JK Flip Flop Circuit. TheoryDocument2 pagesPractical 11: AIM: To Study JK Flip Flop Circuit. Theoryyagnesh100% (1)
- ME:5160 (58:160) Intermediate Mechanics of Fluids Fall 2021 - HW6 SolutionDocument6 pagesME:5160 (58:160) Intermediate Mechanics of Fluids Fall 2021 - HW6 SolutionDiki AgungNo ratings yet
- Executive Summary by Dr. Eugene Brigham and Dr. Joel HoustonDocument12 pagesExecutive Summary by Dr. Eugene Brigham and Dr. Joel HoustonCharisseMaeM.CarreonNo ratings yet
- Curl and DivDocument3 pagesCurl and DivgjdapromiseNo ratings yet
- Excel - 1G - Regional - Sales: Project DescriptionDocument3 pagesExcel - 1G - Regional - Sales: Project Descriptioncurtis brownNo ratings yet