You might also like
- Ai OutlineDocument2 pagesAi OutlinesondosNo ratings yet
- Knowledge RepresentationDocument13 pagesKnowledge RepresentationUI19EC21 Talluri issakuNo ratings yet
- Knowledge Representation and Reasoning: University "Politehnica" of Bucharest Department of Computer ScienceDocument39 pagesKnowledge Representation and Reasoning: University "Politehnica" of Bucharest Department of Computer ScienceMaria-Mihaela FainareaNo ratings yet
- Knowledge Representation and Reasoning: University "Politehnica" of Bucharest Department of Computer ScienceDocument25 pagesKnowledge Representation and Reasoning: University "Politehnica" of Bucharest Department of Computer Scienceusman kebatoNo ratings yet
- Updated DLD - Course OutlineDocument8 pagesUpdated DLD - Course OutlineabsarNo ratings yet
- Representation & Reasoning, Representational Dimensions, Course OverviewDocument33 pagesRepresentation & Reasoning, Representational Dimensions, Course OverviewBrice TangangNo ratings yet
- Discrete Structures 30092022 115600amDocument5 pagesDiscrete Structures 30092022 115600amAbdulNo ratings yet
- Protechsoft Java Guideline Material PDFDocument229 pagesProtechsoft Java Guideline Material PDFRAZI RAHMANNo ratings yet
- CS502 CCPDocument10 pagesCS502 CCPrishi acharyaNo ratings yet
- Course Plan: Algorithm Analysis and DesignDocument7 pagesCourse Plan: Algorithm Analysis and DesignDrMohamed MustaqNo ratings yet
- B.tech IT Syllabus 2017 RegulationDocument12 pagesB.tech IT Syllabus 2017 RegulationNandha KumarNo ratings yet
- Lecture 1Document20 pagesLecture 1SOUMYODEEP NAYAK 22BCE10547No ratings yet
- L02 - Knowledge-Rep - Part 1Document47 pagesL02 - Knowledge-Rep - Part 1jl289173No ratings yet
- Csc-4101Artificial Intelligence: Course Information SheetDocument3 pagesCsc-4101Artificial Intelligence: Course Information SheetSara ShahnawazNo ratings yet
- Online AI For BeginnersDocument2 pagesOnline AI For Beginnersprajari ghoshNo ratings yet
- Prime Classes BrochureDocument14 pagesPrime Classes BrochurearavindNo ratings yet
- Introduction To Logic Programming: Dr. Abdelaziz SaidDocument31 pagesIntroduction To Logic Programming: Dr. Abdelaziz SaidMohamed FassalNo ratings yet
- C 6 CB 0 Lecture 1Document24 pagesC 6 CB 0 Lecture 1Pallavi DasguptaNo ratings yet
- Edited ITDSDocument2 pagesEdited ITDSshreyaspoojary51No ratings yet
- Lahore Garrison University: Course Syllabus DescriptionDocument4 pagesLahore Garrison University: Course Syllabus DescriptionMohammad SuhaibNo ratings yet
- B.TECH (Computer Engineering) Semester - Iii Course SyllabusDocument17 pagesB.TECH (Computer Engineering) Semester - Iii Course SyllabusDivyam BhushanNo ratings yet
- Unit1 AI PPT Dhilip UpdatedDocument221 pagesUnit1 AI PPT Dhilip UpdatedAlex SonNo ratings yet
- Natural Language Processing Professional ProgramDocument13 pagesNatural Language Processing Professional ProgramAnonymous Thqseoo7MFNo ratings yet
- Natural Language Processing Professional ProgramDocument12 pagesNatural Language Processing Professional ProgramAnonymous 3fJkf2VvhNo ratings yet
- IR ModelsDocument261 pagesIR ModelsVijaya NatarajanNo ratings yet
- Cse SyllabusDocument34 pagesCse SyllabusVaishnavi MittalNo ratings yet
- DLD Theory F23Document4 pagesDLD Theory F23Imran Ahmad AhmadNo ratings yet
- MAT1016Document3 pagesMAT1016ms harshithaNo ratings yet
- Master of Computer ApplicationsDocument63 pagesMaster of Computer Applications246 D Amey SalviNo ratings yet
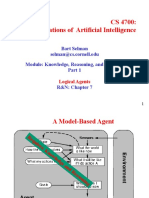
- CS 4700: Foundations of Artificial IntelligenceDocument91 pagesCS 4700: Foundations of Artificial Intelligenceabdolmojeeb nourNo ratings yet
- Artificial IntelligenceDocument2 pagesArtificial IntelligenceAbhi AndhariyaNo ratings yet
- WINSEM2018-19 STS2002 SS 1045 RM001 STS2002 Introduction To Problem Solving & EtiquetteDocument4 pagesWINSEM2018-19 STS2002 SS 1045 RM001 STS2002 Introduction To Problem Solving & EtiquettesuyashNo ratings yet
- Hybrid LogicDocument78 pagesHybrid LogicChris WalkerNo ratings yet
- Sem 321Document24 pagesSem 321Joydeb SheetNo ratings yet
- Course Outline Artificial Intelligence Outline F19Document4 pagesCourse Outline Artificial Intelligence Outline F19Muhammad UmairNo ratings yet
- Syllabus MCA-AIDocument2 pagesSyllabus MCA-AIDULAL SAMANTANo ratings yet
- Updated Syllabus - ME CSE Word Document PDFDocument62 pagesUpdated Syllabus - ME CSE Word Document PDFGayathri R HICET CSE STAFFNo ratings yet
- Knowledge Representation and Reasoning: Dr. Anjali DiwanDocument57 pagesKnowledge Representation and Reasoning: Dr. Anjali DiwanPaulos KNo ratings yet
- Artificial IntelligenceDocument3 pagesArtificial Intelligencekuky_barbieNo ratings yet
- Fintech ML Using AzureDocument51 pagesFintech ML Using AzureVikram PandyaNo ratings yet
- Data StructuresDocument5 pagesData StructurespathmakerpkNo ratings yet
- BCT 212 DATA STRUCTURES AND ALGORITHMS RevisedDocument4 pagesBCT 212 DATA STRUCTURES AND ALGORITHMS Revisedgarashi jumaNo ratings yet
- Language Models Can Be Logical SolversDocument13 pagesLanguage Models Can Be Logical Solversthe4powerNo ratings yet
- Training Modules Semester Wise For 3nd Year Students of JSPM Group of Institutions - Seventh Sense - 2021.Document5 pagesTraining Modules Semester Wise For 3nd Year Students of JSPM Group of Institutions - Seventh Sense - 2021.Richa SinghNo ratings yet
- Robotics and AIDocument3 pagesRobotics and AINeeraj ChaudharyNo ratings yet
- Remarks - AI - LECTURES - DR ALI HUSSEIN HASAN - Upload by Diaa SaedDocument93 pagesRemarks - AI - LECTURES - DR ALI HUSSEIN HASAN - Upload by Diaa Saedواثق ناظم هنديNo ratings yet
- Course Code: Course Title TPC Version No. Course Pre-Requisites/ Co-Requisites/ Anti-Requisites (If Any)Document3 pagesCourse Code: Course Title TPC Version No. Course Pre-Requisites/ Co-Requisites/ Anti-Requisites (If Any)ch lokeshNo ratings yet
- ISC Class 12 Computer Science Syllabus 2023 24Document5 pagesISC Class 12 Computer Science Syllabus 2023 24prashant.cbicNo ratings yet
- CHO - Problem Solving Using Python Programming - 2022Document7 pagesCHO - Problem Solving Using Python Programming - 2022abcgagan1No ratings yet
- Software DevelopmentDocument5 pagesSoftware DevelopmentJames HookerNo ratings yet
- Pendings CSF THDocument6 pagesPendings CSF THNaimat khanNo ratings yet
- Mat2002 Discrete-Mathematics-And-Graph-Theory LT 1.0 1 Mat2002Document2 pagesMat2002 Discrete-Mathematics-And-Graph-Theory LT 1.0 1 Mat2002aaryaveeryadav2005No ratings yet
- Assumption of (Traditional) AI Work Is ThatDocument20 pagesAssumption of (Traditional) AI Work Is ThatNitesh MishraNo ratings yet
- Zero Lecture MTH401.Pptx FinalDocument33 pagesZero Lecture MTH401.Pptx Finalfakedark9182No ratings yet
- 01-Intro EDA SoftwareDocument18 pages01-Intro EDA SoftwareCamelia TauvelNo ratings yet
- CS221 - Artificial Intelligence - Machine Learning - 1 OverviewDocument16 pagesCS221 - Artificial Intelligence - Machine Learning - 1 OverviewArdiansyah Mochamad NugrahaNo ratings yet
- DS Lecture-1Document93 pagesDS Lecture-1Muzamal1656No ratings yet
- Adsa Ka SyllabusDocument3 pagesAdsa Ka SyllabusHacker RanjanNo ratings yet
- Exemplar-Based Knowledge Acquisition: A Unified Approach to Concept Representation, Classification, and LearningFrom EverandExemplar-Based Knowledge Acquisition: A Unified Approach to Concept Representation, Classification, and LearningNo ratings yet
- Fpga Based Real-Time Wireless Home Control Solutions For Lighting, Security, Hvac and Av SystemsDocument5 pagesFpga Based Real-Time Wireless Home Control Solutions For Lighting, Security, Hvac and Av SystemsLiviu NitaNo ratings yet
- Home Automation Through FPGA Controller: November 2015Document5 pagesHome Automation Through FPGA Controller: November 2015Liviu NitaNo ratings yet
- BD1 LABORATOR 22mai2019 CCDocument3 pagesBD1 LABORATOR 22mai2019 CCLiviu NitaNo ratings yet
- Studying Group Behaviors: A Tutorial On Text and Network Analysis MethodsDocument18 pagesStudying Group Behaviors: A Tutorial On Text and Network Analysis MethodsLiviu NitaNo ratings yet
- Ciocea DanielaDocument1 pageCiocea DanielaLiviu NitaNo ratings yet
- 7th of The 12Document40 pages7th of The 12Liviu NitaNo ratings yet
- Recursion: - ProgrammingDocument149 pagesRecursion: - ProgrammingBharadwaj KasturiNo ratings yet
- Tybms Regular Exams Operations Research Set 1Document6 pagesTybms Regular Exams Operations Research Set 1Surekha DebadwarNo ratings yet
- What Is Stack?Document5 pagesWhat Is Stack?Bharti PatelNo ratings yet
- DAA Test-1Document2 pagesDAA Test-1Tejas NitnavareNo ratings yet
- The Caratheodry-Hahn TheoremDocument5 pagesThe Caratheodry-Hahn TheoremCesar CMNo ratings yet
- Notes 2 - 4 - Algebraic Method MinimizationDocument8 pagesNotes 2 - 4 - Algebraic Method MinimizationPrincess Joy DiocaresNo ratings yet
- Fundamentals of LogicDocument14 pagesFundamentals of Logicmadhav badireddyNo ratings yet
- Dld-Mbu Mid 1 QPDocument1 pageDld-Mbu Mid 1 QPgaganseeker100% (1)
- Discrete Structures For Computer Science: Lecture - 13 DR DPRV Subba RaoDocument29 pagesDiscrete Structures For Computer Science: Lecture - 13 DR DPRV Subba RaoPandu DoradlaNo ratings yet
- Logical Agents: (AIMA - Chapter 7)Document31 pagesLogical Agents: (AIMA - Chapter 7)HafidzNo ratings yet
- Rough SetsDocument127 pagesRough SetsalmisaanyNo ratings yet
- Discrete Chapter 3 AlgorithmsDocument3 pagesDiscrete Chapter 3 AlgorithmsHina MalikNo ratings yet
- Unconstrained Optimization Methods: Amirkabir University of Technology Dr. MadadiDocument10 pagesUnconstrained Optimization Methods: Amirkabir University of Technology Dr. MadadissNo ratings yet
- (Maa 1.8) Methods of Proof - SolutionsDocument5 pages(Maa 1.8) Methods of Proof - SolutionsjulianwesselsambrosyNo ratings yet
- Teori Himpunan Dan LogikaDocument12 pagesTeori Himpunan Dan LogikaKou JuniorNo ratings yet
- Quicksort: - Sort An Array A (P R) - DivideDocument50 pagesQuicksort: - Sort An Array A (P R) - DividekjhofboaNo ratings yet
- CO322: DS & A (Simple Yet) Efficient Algorithms: Dhammika ElkaduweDocument34 pagesCO322: DS & A (Simple Yet) Efficient Algorithms: Dhammika ElkaduweMohamaad SihatthNo ratings yet
- XII-Maths-Regular Phase LDA-2 PDFDocument93 pagesXII-Maths-Regular Phase LDA-2 PDFKk MakerNo ratings yet
- Example: AlgebraicDocument16 pagesExample: AlgebraicValentioNo ratings yet
- Design and Analysis of Algorithms Feb 2022Document2 pagesDesign and Analysis of Algorithms Feb 2022QwertyNo ratings yet
- 07 Fuzzy LogicDocument40 pages07 Fuzzy LogicRayse ChaiNo ratings yet
- 1a. Practice Quiz 2 - SolutionDocument5 pages1a. Practice Quiz 2 - SolutionmaryamNo ratings yet
- Numerical Analysis 10th Edition Burden Test BankDocument33 pagesNumerical Analysis 10th Edition Burden Test Banklogosdeviatorjx3b7i100% (23)
- Theory of ComputationDocument445 pagesTheory of ComputationVyhxNo ratings yet
- MA203 Real Analysis: MA103 Revision Material: Lecture NotesDocument39 pagesMA203 Real Analysis: MA103 Revision Material: Lecture NotesTOM DAVISNo ratings yet
- Re IntegrationDocument300 pagesRe IntegrationUm TiagoNo ratings yet
- DMDocument14 pagesDMPhani KumarNo ratings yet
- Discrete Mathematics - Propositional LogicDocument8 pagesDiscrete Mathematics - Propositional LogicAldrich PanioNo ratings yet
- KEE401 ASSIGNMENTS and QUESTION BANKDocument17 pagesKEE401 ASSIGNMENTS and QUESTION BANKPrince VermaNo ratings yet
- Daniel Moune Algo Ds 2 Assignment 2Document5 pagesDaniel Moune Algo Ds 2 Assignment 2oliviertwizzNo ratings yet