You might also like
- Irjet V4i9125Document7 pagesIrjet V4i9125henyNo ratings yet
- Review Paper On Design and Fabrication of Remotely Operated Under Water Electric Welding VehicleDocument8 pagesReview Paper On Design and Fabrication of Remotely Operated Under Water Electric Welding VehiclevikasroccksNo ratings yet
- Water Pipe Robot With Soft Inflatable ActuatorsDocument7 pagesWater Pipe Robot With Soft Inflatable ActuatorseyaoNo ratings yet
- Underwater CommsDocument11 pagesUnderwater CommsGJ GNANA VENKAT NAGNo ratings yet
- An AUV Based Experimental System For The Underwater Technology EducationDocument7 pagesAn AUV Based Experimental System For The Underwater Technology EducationUkrit MeesangphraoNo ratings yet
- A Study of The Feasibility of Autonomous Underwater Vehicles and Remotely Operated Vehicles in Black SeaDocument10 pagesA Study of The Feasibility of Autonomous Underwater Vehicles and Remotely Operated Vehicles in Black SeaRebecca JohnsonNo ratings yet
- (Kenneth H. Rose) Project Quality Management WhyDocument9 pages(Kenneth H. Rose) Project Quality Management Whydiana nistoranNo ratings yet
- 1 s2.0 S0029801822024738 MainDocument14 pages1 s2.0 S0029801822024738 Main715068500No ratings yet
- Submarine ArticleDocument26 pagesSubmarine ArticleDavid MF CocNo ratings yet
- Autonomous Underwater Vehicles: Instrumentation and MeasurementsDocument14 pagesAutonomous Underwater Vehicles: Instrumentation and MeasurementsSHAKEERA SHAIKNo ratings yet
- Uwsn Milcom 2005 PDFDocument7 pagesUwsn Milcom 2005 PDFamit guptaNo ratings yet
- ODYN2012Document12 pagesODYN2012Bruno MedinaNo ratings yet
- Effects of Water Depth, Mooring Line Diameter and Hydrodynamiccoefficients On The Behaviour of Deepwater FPSOsDocument13 pagesEffects of Water Depth, Mooring Line Diameter and Hydrodynamiccoefficients On The Behaviour of Deepwater FPSOsabuNo ratings yet
- 1 s2.0 S0029801822012392 Main PDFDocument12 pages1 s2.0 S0029801822012392 Main PDFDävîd MõnrōyNo ratings yet
- Yuan 2021 J. Phys.: Conf. Ser. 1865 032083Document12 pagesYuan 2021 J. Phys.: Conf. Ser. 1865 032083xsystemNo ratings yet
- Ss WWDocument13 pagesSs WWseret GideyNo ratings yet
- Flexible PipeDocument17 pagesFlexible PipeAnonymous dSFbLxc9100% (1)
- Past, Current and Future Technologies For Optical Submarine CablesDocument7 pagesPast, Current and Future Technologies For Optical Submarine Cablessoon hwa chinNo ratings yet
- IOP Conference Series: Materials Science and Engineering Underground Public SpaceDocument10 pagesIOP Conference Series: Materials Science and Engineering Underground Public SpaceRizky PasopatiNo ratings yet
- Design and Development of Low-Cost Water Tunnel For Educational PurposeDocument9 pagesDesign and Development of Low-Cost Water Tunnel For Educational PurposeIbrahim MadanNo ratings yet
- Development of A Four-Dof Laboratory Underwater Manipulator For Using in Towing TankDocument6 pagesDevelopment of A Four-Dof Laboratory Underwater Manipulator For Using in Towing TankMostafa EsmaeilianNo ratings yet
- Underwater Detection Systems for Harbor SurveillanceDocument13 pagesUnderwater Detection Systems for Harbor SurveillanceTrầnHữuHòaNo ratings yet
- TridentDocument6 pagesTridentpranav_devilNo ratings yet
- Promax Processing Seismic Marine TextbookDocument14 pagesPromax Processing Seismic Marine TextbooksulistyooetomoputroNo ratings yet
- Dynamic Analysis of Submarine Cable During The Process of Laying Back To The SeabedDocument10 pagesDynamic Analysis of Submarine Cable During The Process of Laying Back To The SeabedIbinabo ImabiboNo ratings yet
- Seepage Analysis of A Zoned Earth Dam by Finite ElementsDocument13 pagesSeepage Analysis of A Zoned Earth Dam by Finite ElementschalaNo ratings yet
- Detection of Water Seepage in Lake Body Using Ground Penetrating Radar MethodDocument11 pagesDetection of Water Seepage in Lake Body Using Ground Penetrating Radar MethodAbdurrahman WafiNo ratings yet
- Technical Seminar ReportDocument30 pagesTechnical Seminar ReportSagar RathodNo ratings yet
- Elementary and Higher Surveying: (Laboratory)Document7 pagesElementary and Higher Surveying: (Laboratory)JohnDominicMoralesNo ratings yet
- Boundary Layer 10th ExprDocument50 pagesBoundary Layer 10th ExprMadhulaalasa KurmaNo ratings yet
- Design Considerations For III Dynamically Positioned VesselsDocument22 pagesDesign Considerations For III Dynamically Positioned VesselsSHARATHNo ratings yet
- Design of A Compact ROV For River Exploration: Avilash Sahoo Santosha K. Dwivedy P. S. RobiDocument6 pagesDesign of A Compact ROV For River Exploration: Avilash Sahoo Santosha K. Dwivedy P. S. RobiManuel Diaz Gomez100% (1)
- The Three Gorges Dam of China: Technology To Bridge Two CenturiesDocument4 pagesThe Three Gorges Dam of China: Technology To Bridge Two CenturiesIkhwan IlmiNo ratings yet
- Autonomous Underwater Vehicles Recent deDocument8 pagesAutonomous Underwater Vehicles Recent demata mareNo ratings yet
- Numerical Investigation of Shallow Water Effect On A Barge Ship ResistanceDocument9 pagesNumerical Investigation of Shallow Water Effect On A Barge Ship ResistancegksahaNo ratings yet
- Yahya - Seminar ReportDocument27 pagesYahya - Seminar ReportSafalsha BabuNo ratings yet
- Research Paper On Underwater Wireless CommunicationDocument6 pagesResearch Paper On Underwater Wireless CommunicationjhwmemrhfNo ratings yet
- Underwater Rov ThesisDocument4 pagesUnderwater Rov Thesisafcmayfzq100% (1)
- Jurnal 5Document8 pagesJurnal 5Naga HijauNo ratings yet
- 176 184 93272 Yati Feb 2019 54gDocument10 pages176 184 93272 Yati Feb 2019 54gmahera wijaksaraNo ratings yet
- 1-S2.0-S0029801821008441-Main Wave ModelDocument16 pages1-S2.0-S0029801821008441-Main Wave Modelegemen gökalpNo ratings yet
- Dellinger 2016 IOP Conf. Ser. Earth Environ. Sci. 49 102002Document11 pagesDellinger 2016 IOP Conf. Ser. Earth Environ. Sci. 49 102002Milagros Alejandra Aragón DimasNo ratings yet
- Hydrographic Surveying: An IntroductionDocument5 pagesHydrographic Surveying: An IntroductionAdil FaiyazNo ratings yet
- OTC 12004 A High-Resolution Survey AUV: Deep-Towed SystemsDocument5 pagesOTC 12004 A High-Resolution Survey AUV: Deep-Towed SystemsThomas ThomasNo ratings yet
- Offshore Platform Development. Focus On Semisubmersibles DesignDocument5 pagesOffshore Platform Development. Focus On Semisubmersibles DesignKeith DixonNo ratings yet
- Review of Underwater Cable Shape Detection MethodsDocument10 pagesReview of Underwater Cable Shape Detection Methodsrianto wibowoNo ratings yet
- 2 ShipsDocument16 pages2 ShipsMjNo ratings yet
- Edas Final-1570046541Document3 pagesEdas Final-1570046541lissa.gourillonNo ratings yet
- SimulationofDeep WaterWavesBasedonDocument5 pagesSimulationofDeep WaterWavesBasedonMuntoiaNo ratings yet
- Ahmad Azimi B KamaludinDocument69 pagesAhmad Azimi B KamaludinFirdausi FauziNo ratings yet
- Kusuma 2021 IOP Conf. Ser. Mater. Sci. Eng. 1052 012026Document8 pagesKusuma 2021 IOP Conf. Ser. Mater. Sci. Eng. 1052 012026bilalsoysal6034No ratings yet
- 1 s2.0 S0029801822002840 MainDocument13 pages1 s2.0 S0029801822002840 Main刘五六No ratings yet
- Study On Control System of Integrated Unmanned Surface Vehicle and Underwater VehicleDocument23 pagesStudy On Control System of Integrated Unmanned Surface Vehicle and Underwater VehicleDong HoangNo ratings yet
- Prototype System Design of Mooring Buoy For Sea Oor Observation and Construction of Its Communication LinkDocument10 pagesPrototype System Design of Mooring Buoy For Sea Oor Observation and Construction of Its Communication LinkAhmadFahcruddinNo ratings yet
- CFD Validation and Grid Sensitivity Studies of Full Scale Ship Self PropulsionDocument11 pagesCFD Validation and Grid Sensitivity Studies of Full Scale Ship Self PropulsionAshley KwambokaNo ratings yet
- Yan 2018 IOP Conf. Ser. Mater. Sci. Eng. 417 012028Document6 pagesYan 2018 IOP Conf. Ser. Mater. Sci. Eng. 417 012028Mehran FathzadehNo ratings yet
- Investigation On Resistance Effects Through Towing Test and CFD Analysis On Catamaran Boat Hull FormDocument11 pagesInvestigation On Resistance Effects Through Towing Test and CFD Analysis On Catamaran Boat Hull FormAnant AjithkumarNo ratings yet
- 1 s2.0 S0029801818310308 MainDocument20 pages1 s2.0 S0029801818310308 MainManoj MallickNo ratings yet
- Wireless Transmission of Photographs Second Edition, Revised and Enlarged 1919From EverandWireless Transmission of Photographs Second Edition, Revised and Enlarged 1919No ratings yet
- Sewage Disposal Works: Their Design and ConstructionFrom EverandSewage Disposal Works: Their Design and ConstructionNo ratings yet
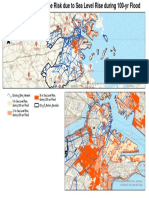
- City of Boston Bike Line Risk Due To Sea Level RiseDocument1 pageCity of Boston Bike Line Risk Due To Sea Level RisedanuradityaNo ratings yet
- Experimental Determination of Non-Linear Roll Damping of An FPSO Pure Roll Coupled With Liquid Sloshing in Two-Row TanksDocument21 pagesExperimental Determination of Non-Linear Roll Damping of An FPSO Pure Roll Coupled With Liquid Sloshing in Two-Row TanksJiban podderNo ratings yet
- Materials Classification GuideDocument22 pagesMaterials Classification GuidedanuradityaNo ratings yet
- Committee: IOP Conference Series: Earth and Environmental ScienceDocument3 pagesCommittee: IOP Conference Series: Earth and Environmental SciencedanuradityaNo ratings yet
- (Document Title) : Kelompok #XX: Nama/NRP (Course Title) (Date)Document2 pages(Document Title) : Kelompok #XX: Nama/NRP (Course Title) (Date)Nanda IlhamNo ratings yet
- (Document Title) : Kelompok #XX: Nama/NRP (Course Title) (Date)Document2 pages(Document Title) : Kelompok #XX: Nama/NRP (Course Title) (Date)Nanda IlhamNo ratings yet
- Tugas SemisubDocument1 pageTugas SemisubdanuradityaNo ratings yet
- DNV GL Class DocumentsDocument21 pagesDNV GL Class DocumentsArturo100% (1)
- Rimse 20100927Document133 pagesRimse 20100927Kamal BukhariNo ratings yet
- The Following Is The Transcript of The Speech Given by CAPT Phillip Boyer On The Occasion of The Decommissioning of USS QueenfishDocument9 pagesThe Following Is The Transcript of The Speech Given by CAPT Phillip Boyer On The Occasion of The Decommissioning of USS QueenfishSR MonicasreeNo ratings yet
- Submarine Transmission Course OverviewDocument72 pagesSubmarine Transmission Course OverviewKENMOGNE TAMO MARTIALNo ratings yet
- Deep Dark Blue, A World of Adventure For Fate CoreDocument56 pagesDeep Dark Blue, A World of Adventure For Fate CoreSantiago Scalercio100% (2)
- Modern naval vessels and aircraft featured in War Machine magazineDocument24 pagesModern naval vessels and aircraft featured in War Machine magazineady100% (3)
- CGX Air Superiority Cruiser Design ReportDocument136 pagesCGX Air Superiority Cruiser Design Reportskylancer-3441No ratings yet
- Argentine Destroyers and Frigates ReferenceDocument541 pagesArgentine Destroyers and Frigates Referencebancnota45No ratings yet
- Naval Architecture DigestDocument19 pagesNaval Architecture DigestShivananda PatraNo ratings yet
- Soviet Naval Battles During Civil WarDocument58 pagesSoviet Naval Battles During Civil WarBrett Michael ChinchenNo ratings yet
- DOD - Joint Operational Access Concept - 2011Document75 pagesDOD - Joint Operational Access Concept - 2011Alex LittlefieldNo ratings yet
- SSN 774 Virginia Class SubmarineDocument4 pagesSSN 774 Virginia Class Submarinejoma11No ratings yet
- Pulp SeedsDocument5 pagesPulp SeedsJohn MarkosNo ratings yet
- Vego - SSKs and Shallow Water ASWDocument7 pagesVego - SSKs and Shallow Water ASWDMNo ratings yet
- BFT 603 U 4Document34 pagesBFT 603 U 4Swara BhaydeNo ratings yet
- The Undersea Shell GameDocument252 pagesThe Undersea Shell Gamejohn sheaNo ratings yet
- Rwsubmarine Cables - 1920T2 - PE4 5EEA - POMAREJO, HuemarieDocument5 pagesRwsubmarine Cables - 1920T2 - PE4 5EEA - POMAREJO, HuemarieHUE POMAREJONo ratings yet
- DAMEN CrossOver BrochureDocument2 pagesDAMEN CrossOver BrochureGabrieleMolinelli100% (3)
- Submarines and SubmersiblesDocument28 pagesSubmarines and Submersiblespraveench1888No ratings yet
- Universal Sound Effects LibraryDocument25 pagesUniversal Sound Effects Librarynikos.karakalosNo ratings yet
- 55 Murky Waters: The Legal Status of Unmanned Undersea VehiclesDocument17 pages55 Murky Waters: The Legal Status of Unmanned Undersea VehiclesAbhinandan JainNo ratings yet
- Submarine Communications Cable Deep-Sea Application: Gary Waterworth, WatsonDocument6 pagesSubmarine Communications Cable Deep-Sea Application: Gary Waterworth, WatsonNamrata ToleNo ratings yet
- Naval Weapons SystemsDocument15 pagesNaval Weapons Systemssikhunsis100% (1)
- Realistic Mod Version 48 Features OverviewDocument10 pagesRealistic Mod Version 48 Features OverviewLuis MillasakyNo ratings yet
- Ship Shape Pamphlet (US Navy 1943)Document35 pagesShip Shape Pamphlet (US Navy 1943)Albert MarkishNo ratings yet
- De Chinh Thuc Anh 9 1Document8 pagesDe Chinh Thuc Anh 9 1Đức Đam VũNo ratings yet
- LIGNex1 BR BUS2022 ENDocument18 pagesLIGNex1 BR BUS2022 ENAlperen Bozdemir100% (1)
- SH ManualDocument44 pagesSH Manualskip3333No ratings yet
- Dwnload Full Principles of Marketing An Asian Perspective 3rd Edition Kotler Test Bank PDFDocument36 pagesDwnload Full Principles of Marketing An Asian Perspective 3rd Edition Kotler Test Bank PDFabsterseabattoir9g7ox100% (9)
- Multiplying The Effectiveness of Naval ASWDocument5 pagesMultiplying The Effectiveness of Naval ASWBùi Trường GiangNo ratings yet