You might also like
- Lab5a Fa10Document4 pagesLab5a Fa10alexlenevez_12130% (1)
- MACE61222 Helicopters ExamDocument4 pagesMACE61222 Helicopters ExamTemirlan OtepbergenovNo ratings yet
- Helical Springs ReportDocument11 pagesHelical Springs ReportHeather TatNo ratings yet
- Simulation MethodologyDocument9 pagesSimulation MethodologyRanjeetTwaynaNo ratings yet
- Civil Lab ManualDocument17 pagesCivil Lab ManualShakil KhanNo ratings yet
- Experiment 4 - Voltage Variations in An RC CircuitDocument3 pagesExperiment 4 - Voltage Variations in An RC CircuitTATENDA GOTONo ratings yet
- Experiment No. 6 Oscillators 1 PDFDocument24 pagesExperiment No. 6 Oscillators 1 PDFSittie Ainna A. UnteNo ratings yet
- Design of The Test Stand For Hydraulic Active Heave Compensation SystemDocument3 pagesDesign of The Test Stand For Hydraulic Active Heave Compensation SystemkazdanoNo ratings yet
- MBU BEEE Lab MergedDocument53 pagesMBU BEEE Lab MergedgaganseekerNo ratings yet
- Lab 7Document8 pagesLab 7Magdalena SimicNo ratings yet
- Production Method For Violent TCB Jet Plasma From CavityDocument8 pagesProduction Method For Violent TCB Jet Plasma From CavityBarrett GibsonNo ratings yet
- Experiment V - Viscosity of Oil by The Rotating Cylinder MethodDocument16 pagesExperiment V - Viscosity of Oil by The Rotating Cylinder MethodMaciej WędrychowiczNo ratings yet
- 6655 Lab ManualDocument160 pages6655 Lab ManualNoman Nisar100% (1)
- The Pelton Wheel: 1 ObjectivesDocument8 pagesThe Pelton Wheel: 1 ObjectivesAbelBayartNo ratings yet
- Lab Report of Strain Gauges and Load Cells PDFDocument11 pagesLab Report of Strain Gauges and Load Cells PDFAamnaNo ratings yet
- 3 Lab 3: DC Motor Transfer Function Estimation by Explicit MeasurementDocument9 pages3 Lab 3: DC Motor Transfer Function Estimation by Explicit MeasurementRogger MezaNo ratings yet
- Turbomachinery-3t2-CITY N GUID PDFDocument25 pagesTurbomachinery-3t2-CITY N GUID PDFolaNo ratings yet
- ME 5/7371, Spring 2022 Assigned: W, 3-2-22 Due: W, 3-9-22 (In Class)Document2 pagesME 5/7371, Spring 2022 Assigned: W, 3-2-22 Due: W, 3-9-22 (In Class)travisNo ratings yet
- Expt No 3Document3 pagesExpt No 3puja maneNo ratings yet
- CSTRDocument11 pagesCSTRJocelyn garcia gonzalezNo ratings yet
- Lab Handout - 10 Phase Shift Measurement Iof Series RLCDocument5 pagesLab Handout - 10 Phase Shift Measurement Iof Series RLCAbdul QudoosNo ratings yet
- LAB 8: Stain Gauge MeasurementDocument4 pagesLAB 8: Stain Gauge MeasurementAkinoJohnkennedyNo ratings yet
- Slow-Scale Bifurcation Behavior of Parallel-Connected Boost Converters Via Averaged ModelsDocument18 pagesSlow-Scale Bifurcation Behavior of Parallel-Connected Boost Converters Via Averaged ModelselsaordunaNo ratings yet
- Lab E1 RLC CircuitDocument11 pagesLab E1 RLC CircuitChing Wai Yong100% (1)
- EE 201 Lab !Document4 pagesEE 201 Lab !Zeljko MilovancevicNo ratings yet
- Experiment 7 - 0 and 8 - 0Document7 pagesExperiment 7 - 0 and 8 - 0efecakir03No ratings yet
- Exp (4) - RF OscillatorsDocument12 pagesExp (4) - RF OscillatorsTony SopranoNo ratings yet
- Bell Crank LeverDocument5 pagesBell Crank LeverNuyara VithanageNo ratings yet
- Chapter 12Document12 pagesChapter 12bhaskarNo ratings yet
- 3.ae ZG511 Ec-2r First Sem 2022-2023Document7 pages3.ae ZG511 Ec-2r First Sem 2022-2023aaquibkhanNo ratings yet
- Study of The Characteristics of The Klystron Tube: Experiment-4Document8 pagesStudy of The Characteristics of The Klystron Tube: Experiment-4Akanksha VermaNo ratings yet
- A Modified Balancing Method For Flexible Rotors Based On Multi-Sensor FusionDocument5 pagesA Modified Balancing Method For Flexible Rotors Based On Multi-Sensor FusionPawan ChaturvediNo ratings yet
- Woytowich R.calculation of Prope - dec.1979.JSRDocument7 pagesWoytowich R.calculation of Prope - dec.1979.JSRJohn KokarakisNo ratings yet
- Radio Telescope Antenna Azimuth Position 3Document13 pagesRadio Telescope Antenna Azimuth Position 3Nadzmi MizoNo ratings yet
- EE 230 - Analog Lab - 2021-22/I (Autumn) Experiment 3: BJT Voltage Amplifiers (CE and CC)Document7 pagesEE 230 - Analog Lab - 2021-22/I (Autumn) Experiment 3: BJT Voltage Amplifiers (CE and CC)SruthiNo ratings yet
- P 303 AnsDocument4 pagesP 303 AnsDiptoNo ratings yet
- Supercritical Airfoil and CharacteristicsDocument7 pagesSupercritical Airfoil and CharacteristicsABHISHEK MANI TRIPATHINo ratings yet
- Measurement of Ship's MotionsDocument3 pagesMeasurement of Ship's Motionsgk80823No ratings yet
- AmplifierDocument3 pagesAmplifierdevanarayan2000No ratings yet
- 241 DocumentationDocument61 pages241 DocumentationPunita SinghNo ratings yet
- Lab 1 Basic RL and RC DC Circuits PDFDocument32 pagesLab 1 Basic RL and RC DC Circuits PDFMarc CalilungNo ratings yet
- Thevenin's TheoremDocument10 pagesThevenin's TheoremMoaid BinNo ratings yet
- Gas Compressor Calculations Tutorial PDFDocument7 pagesGas Compressor Calculations Tutorial PDFHaARSIMRAn100% (1)
- 5054 On 2021 P22Document14 pages5054 On 2021 P22Raahin RahimNo ratings yet
- Experiment 7 ET 332b No-Load and Starting Characteristics of Squirrel-Cage Induction Motors PurposeDocument12 pagesExperiment 7 ET 332b No-Load and Starting Characteristics of Squirrel-Cage Induction Motors PurposeGopinath B L NaiduNo ratings yet
- Stromer ViscosityDocument4 pagesStromer ViscosityJiral PatelNo ratings yet
- Ads Lab 5 - AloyDocument9 pagesAds Lab 5 - AloySilas Sailas EndjalaNo ratings yet
- Ge320 Lab2Document7 pagesGe320 Lab2hbuddyNo ratings yet
- Manual Ee ViiiDocument43 pagesManual Ee ViiiAkhilesh Kumar MishraNo ratings yet
- Exam Experiment Q1 EnglishDocument9 pagesExam Experiment Q1 EnglishKanishk JainNo ratings yet
- Common Emitter Transistor Common Emitter Transistor Amplifier AmplifierDocument9 pagesCommon Emitter Transistor Common Emitter Transistor Amplifier AmplifierMauro FernandoNo ratings yet
- PHY 122L Experiment 8Document6 pagesPHY 122L Experiment 8roden fabregasNo ratings yet
- Lab Assignment #2 Due: Oct. 5, 20 Materials Needed: Sep. 30, 20 Fall 2020Document5 pagesLab Assignment #2 Due: Oct. 5, 20 Materials Needed: Sep. 30, 20 Fall 2020api-482290211No ratings yet
- RC Circuits - George Ricarrson 2501987261Document9 pagesRC Circuits - George Ricarrson 2501987261George RYNo ratings yet
- Lab Manual EE851 PDFDocument20 pagesLab Manual EE851 PDFswarnasrikNo ratings yet
- Department of Electrical Engineering Electical & Electronics Measurement Question BankDocument4 pagesDepartment of Electrical Engineering Electical & Electronics Measurement Question Bankvijay patilNo ratings yet
- Lab 4 Kirchoff Law Sea19029, Sea19004, Sea19027Document14 pagesLab 4 Kirchoff Law Sea19029, Sea19004, Sea19027Muhammad NaguibNo ratings yet
- Solved - Irwin's Sells A Particular Model of Fan, With Most of T...Document4 pagesSolved - Irwin's Sells A Particular Model of Fan, With Most of T...Youth Cricket2017No ratings yet
- IE 533 - Assignment 1Document3 pagesIE 533 - Assignment 1Youth Cricket2017No ratings yet
- Q1: Part (C) Code:: FunctionDocument3 pagesQ1: Part (C) Code:: FunctionYouth Cricket2017No ratings yet
- A Survey On Weather Forecasting by Data Mining: IjarcceDocument3 pagesA Survey On Weather Forecasting by Data Mining: IjarcceYouth Cricket2017No ratings yet
- Solutions To Information Theory Exercise Problems 5-8Document7 pagesSolutions To Information Theory Exercise Problems 5-8Youth Cricket2017No ratings yet
- Design of Work Areas Tools and EquipmentDocument31 pagesDesign of Work Areas Tools and EquipmentYouth Cricket2017No ratings yet
- Work Measurement and Time StudyDocument43 pagesWork Measurement and Time StudyYouth Cricket2017100% (1)
- Seminar Report On WitricityDocument27 pagesSeminar Report On WitricityNITIKA KULVINo ratings yet
- B29 Operations in The Korean War-FinalDocument5 pagesB29 Operations in The Korean War-FinalScott LileNo ratings yet
- Hyperlink Wireless 4.9/5.8 GHZ 23 Dbi Flat Panel Antenna Model: Hg4958-23PDocument2 pagesHyperlink Wireless 4.9/5.8 GHZ 23 Dbi Flat Panel Antenna Model: Hg4958-23PAgustin GallardoNo ratings yet
- 3G (Umts) Handover Issues: Team Members: Cuong Pham & Thomas TruongDocument37 pages3G (Umts) Handover Issues: Team Members: Cuong Pham & Thomas TruongSovy TaingNo ratings yet
- Wire Code Identification: Color Code Color Color Code Color Tracer Wire Color Code ChartDocument8 pagesWire Code Identification: Color Code Color Color Code Color Tracer Wire Color Code ChartLuis Antonio Velazquez OlguinNo ratings yet
- CDR 2005 (Eng) (Manual Servicio)Document18 pagesCDR 2005 (Eng) (Manual Servicio)Walter MontoroNo ratings yet
- Expt-7 - Lab Manual - TE Lab PDFDocument16 pagesExpt-7 - Lab Manual - TE Lab PDFAaryan Rizvan KhanNo ratings yet
- Eps Mma Tig en PDFDocument18 pagesEps Mma Tig en PDFAdrian EftimieNo ratings yet
- HF-Praxis 12-2018 IIIDocument8 pagesHF-Praxis 12-2018 IIIFannush Shofi AkbarNo ratings yet
- Wireless NETWORKS (EC8004) : Dr. B.VENKATALAKSHMI Session #03 802.11 Protocol ArchitectureDocument22 pagesWireless NETWORKS (EC8004) : Dr. B.VENKATALAKSHMI Session #03 802.11 Protocol ArchitectureM ManjuNo ratings yet
- (IJETA-V10I6P4) :ravi Joshi, Avinash SharmaDocument4 pages(IJETA-V10I6P4) :ravi Joshi, Avinash SharmaIJETA - EighthSenseGroupNo ratings yet
- GD Satcom 3.7M Assembly Manual 4096-225Document32 pagesGD Satcom 3.7M Assembly Manual 4096-225jrdmaNo ratings yet
- Ce Nov 19 R17Document18 pagesCe Nov 19 R17Anonymous yO7rcec6vuNo ratings yet
- Adani 5g SpectrumDocument7 pagesAdani 5g SpectrumMD IRFAN FARUQUENo ratings yet
- Automatic Street Light Control, Fault Detection and Traffic Density ControlDocument6 pagesAutomatic Street Light Control, Fault Detection and Traffic Density ControlNilesh 0059No ratings yet
- Training Course 5g Sa ArchitectureDocument39 pagesTraining Course 5g Sa ArchitectureHilal LakhbatNo ratings yet
- Lecture 1 - Introduction To Electronic CommunicationsDocument28 pagesLecture 1 - Introduction To Electronic Communicationsmelwin victoriaNo ratings yet
- BITSPilani Analog Project ReportDocument12 pagesBITSPilani Analog Project ReportAKASHDEEP MITRANo ratings yet
- ECE4371 Class1Document33 pagesECE4371 Class1Subhankar GhoshNo ratings yet
- User's Manual: Oxygen ConcentratorDocument27 pagesUser's Manual: Oxygen ConcentratorNyobaNo ratings yet
- DAS Design Specification: Includes Installation InstructionsDocument41 pagesDAS Design Specification: Includes Installation InstructionsLee CoteNo ratings yet
- 5-GMDSS 2020 GOC İngilizce Soru CevapDocument5 pages5-GMDSS 2020 GOC İngilizce Soru CevapSokak KedileriNo ratings yet
- Si4702 03 C19 1 PDFDocument46 pagesSi4702 03 C19 1 PDFАндрей ФандеевNo ratings yet
- ALINCO DR-638 English ManualDocument43 pagesALINCO DR-638 English ManualChris GuarinNo ratings yet
- Cs8601 Unit 2 Notes Mobile Computing Unit 2 Anna University Regulation2017Document50 pagesCs8601 Unit 2 Notes Mobile Computing Unit 2 Anna University Regulation2017mymovies1241No ratings yet
- FlightAware MIA STAR AllDocument14 pagesFlightAware MIA STAR AllAndres AmórteguiNo ratings yet
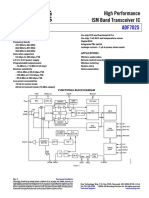
- High Performance ISM Band Transceiver IC: Data SheetDocument41 pagesHigh Performance ISM Band Transceiver IC: Data SheetTuần Hào ĐỗNo ratings yet
- L4 B1PLUS U1 ListeningDocument1 pageL4 B1PLUS U1 ListeningClases MendaviaNo ratings yet
- Hytera Customer Service Express: Issue 11 OctDocument24 pagesHytera Customer Service Express: Issue 11 OctPT7CJDNo ratings yet
- "Light's Golden Jubilee" (October 21, 1929) : Added To The National Registry: 2005 Essay by Cary O'DellDocument3 pages"Light's Golden Jubilee" (October 21, 1929) : Added To The National Registry: 2005 Essay by Cary O'DellEsraIlkayKelogluNo ratings yet