
1 σ-fields and random variables
1 σ-fields and random variables
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Y2 Phonics ModuleDocument36 pagesY2 Phonics ModulepusatlatihanstemnknNo ratings yet
- Processing IDOC Through LSMWDocument9 pagesProcessing IDOC Through LSMWreibeltorresNo ratings yet
- Italian Music Terms ListDocument18 pagesItalian Music Terms ListJoven MagbanuaNo ratings yet
- HandbookDocument385 pagesHandbookCharles LauNo ratings yet
- Sentences & Fragments: S F F S FDocument1 pageSentences & Fragments: S F F S FRA SamsonNo ratings yet
- FL Sanskrit Model Paper-1Document8 pagesFL Sanskrit Model Paper-1vandv printsNo ratings yet
- Uttarakhand ReportDocument21 pagesUttarakhand ReportArpita SahooNo ratings yet
- Bishops in The Catholic ChurchDocument4 pagesBishops in The Catholic ChurchJohnNo ratings yet
- Javascript Cloud Slideshare 140210053940 Phpapp02Document60 pagesJavascript Cloud Slideshare 140210053940 Phpapp02Saint GreenNo ratings yet
- Online Examination Project Report Documentation OnlyDocument48 pagesOnline Examination Project Report Documentation OnlyPranav FirakeNo ratings yet
- Rebirth and The Gandhabba - AnalayoDocument15 pagesRebirth and The Gandhabba - AnalayoguttormngNo ratings yet
- Results: Voice THERAPY Along With Yoga Therapy IN Vocal Cord Palsy: A Case Report Padma Pai 3 BaslpDocument1 pageResults: Voice THERAPY Along With Yoga Therapy IN Vocal Cord Palsy: A Case Report Padma Pai 3 BaslpThe Evil TyrantNo ratings yet
- The Machine's Dialogue by Steve EdwardsDocument15 pagesThe Machine's Dialogue by Steve EdwardsKristie LaNo ratings yet
- English in Mind 4 Students Book Split 2 210921 074354Document16 pagesEnglish in Mind 4 Students Book Split 2 210921 074354Jocelyn AluwiNo ratings yet
- WEG Programing Manual 10003989140 SSW900 enDocument171 pagesWEG Programing Manual 10003989140 SSW900 enCristian R. AguirreNo ratings yet
- DxEDazRomeroPaz Oregon 0171A 11715Document235 pagesDxEDazRomeroPaz Oregon 0171A 11715Benjamin Delgado Torrico CesarNo ratings yet
- Katja Vogt Belief Truth IntroDocument27 pagesKatja Vogt Belief Truth IntroTóth RékaNo ratings yet
- The God of Small Things': A Narrative of Catastrophic Misogynistic ApproachDocument6 pagesThe God of Small Things': A Narrative of Catastrophic Misogynistic ApproachIJELS Research JournalNo ratings yet
- Abhyasa Deepika MathsDocument91 pagesAbhyasa Deepika MathsArogya Raju Pudhota50% (2)
- Reassignment Tools in Funds Management, Which One To ChooseDocument4 pagesReassignment Tools in Funds Management, Which One To ChooseAugusto HectorNo ratings yet
- VSP 70-04-51-00-M122Document25 pagesVSP 70-04-51-00-M122imkzbyNo ratings yet
- Aeta ReportDocument30 pagesAeta ReportSheen Shane Xaii100% (2)
- Poelauncher 20230404 104326 23240Document2 pagesPoelauncher 20230404 104326 23240JihyunChoiNo ratings yet
- Migrating A Bootcamp Partition With Winclone - Twocanoes SupportDocument27 pagesMigrating A Bootcamp Partition With Winclone - Twocanoes SupportThanh NgoNo ratings yet
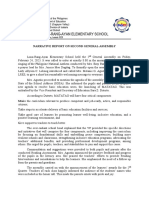
- Narrative - 2nd General AssemblyDocument2 pagesNarrative - 2nd General AssemblyMarianne Uy100% (1)
- Functional Grammar For 5th Semester of English EducationDocument21 pagesFunctional Grammar For 5th Semester of English EducationPutri MelaniaNo ratings yet
- Conditional Sentences / If-Clauses Type I, II and IIIDocument2 pagesConditional Sentences / If-Clauses Type I, II and IIINirmala IgaNo ratings yet
- Class 10 Communication SkillsDocument7 pagesClass 10 Communication Skills979Niya NoushadNo ratings yet
- Verbs BeingDocument9 pagesVerbs Beingkamolpan@gmail.comNo ratings yet
- PI Federation - An OverviewDocument47 pagesPI Federation - An OverviewPuja MalhotraNo ratings yet





































































You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Y2 Phonics ModuleDocument36 pagesY2 Phonics ModulepusatlatihanstemnknNo ratings yet
- Processing IDOC Through LSMWDocument9 pagesProcessing IDOC Through LSMWreibeltorresNo ratings yet
- Italian Music Terms ListDocument18 pagesItalian Music Terms ListJoven MagbanuaNo ratings yet
- HandbookDocument385 pagesHandbookCharles LauNo ratings yet
- Sentences & Fragments: S F F S FDocument1 pageSentences & Fragments: S F F S FRA SamsonNo ratings yet
- FL Sanskrit Model Paper-1Document8 pagesFL Sanskrit Model Paper-1vandv printsNo ratings yet
- Uttarakhand ReportDocument21 pagesUttarakhand ReportArpita SahooNo ratings yet
- Bishops in The Catholic ChurchDocument4 pagesBishops in The Catholic ChurchJohnNo ratings yet
- Javascript Cloud Slideshare 140210053940 Phpapp02Document60 pagesJavascript Cloud Slideshare 140210053940 Phpapp02Saint GreenNo ratings yet
- Online Examination Project Report Documentation OnlyDocument48 pagesOnline Examination Project Report Documentation OnlyPranav FirakeNo ratings yet
- Rebirth and The Gandhabba - AnalayoDocument15 pagesRebirth and The Gandhabba - AnalayoguttormngNo ratings yet
- Results: Voice THERAPY Along With Yoga Therapy IN Vocal Cord Palsy: A Case Report Padma Pai 3 BaslpDocument1 pageResults: Voice THERAPY Along With Yoga Therapy IN Vocal Cord Palsy: A Case Report Padma Pai 3 BaslpThe Evil TyrantNo ratings yet
- The Machine's Dialogue by Steve EdwardsDocument15 pagesThe Machine's Dialogue by Steve EdwardsKristie LaNo ratings yet
- English in Mind 4 Students Book Split 2 210921 074354Document16 pagesEnglish in Mind 4 Students Book Split 2 210921 074354Jocelyn AluwiNo ratings yet
- WEG Programing Manual 10003989140 SSW900 enDocument171 pagesWEG Programing Manual 10003989140 SSW900 enCristian R. AguirreNo ratings yet
- DxEDazRomeroPaz Oregon 0171A 11715Document235 pagesDxEDazRomeroPaz Oregon 0171A 11715Benjamin Delgado Torrico CesarNo ratings yet
- Katja Vogt Belief Truth IntroDocument27 pagesKatja Vogt Belief Truth IntroTóth RékaNo ratings yet
- The God of Small Things': A Narrative of Catastrophic Misogynistic ApproachDocument6 pagesThe God of Small Things': A Narrative of Catastrophic Misogynistic ApproachIJELS Research JournalNo ratings yet
- Abhyasa Deepika MathsDocument91 pagesAbhyasa Deepika MathsArogya Raju Pudhota50% (2)
- Reassignment Tools in Funds Management, Which One To ChooseDocument4 pagesReassignment Tools in Funds Management, Which One To ChooseAugusto HectorNo ratings yet
- VSP 70-04-51-00-M122Document25 pagesVSP 70-04-51-00-M122imkzbyNo ratings yet
- Aeta ReportDocument30 pagesAeta ReportSheen Shane Xaii100% (2)
- Poelauncher 20230404 104326 23240Document2 pagesPoelauncher 20230404 104326 23240JihyunChoiNo ratings yet
- Migrating A Bootcamp Partition With Winclone - Twocanoes SupportDocument27 pagesMigrating A Bootcamp Partition With Winclone - Twocanoes SupportThanh NgoNo ratings yet
- Narrative - 2nd General AssemblyDocument2 pagesNarrative - 2nd General AssemblyMarianne Uy100% (1)
- Functional Grammar For 5th Semester of English EducationDocument21 pagesFunctional Grammar For 5th Semester of English EducationPutri MelaniaNo ratings yet
- Conditional Sentences / If-Clauses Type I, II and IIIDocument2 pagesConditional Sentences / If-Clauses Type I, II and IIINirmala IgaNo ratings yet
- Class 10 Communication SkillsDocument7 pagesClass 10 Communication Skills979Niya NoushadNo ratings yet
- Verbs BeingDocument9 pagesVerbs Beingkamolpan@gmail.comNo ratings yet
- PI Federation - An OverviewDocument47 pagesPI Federation - An OverviewPuja MalhotraNo ratings yet