You might also like
- A330 Normal Law: Putting Fly-by-Wire Into PerspectiveFrom EverandA330 Normal Law: Putting Fly-by-Wire Into PerspectiveRating: 5 out of 5 stars5/5 (2)
- FBW ReportDocument23 pagesFBW ReportMayank JainNo ratings yet
- Introduction to Fly-By-Wire Flight Control SystemsFrom EverandIntroduction to Fly-By-Wire Flight Control SystemsRating: 5 out of 5 stars5/5 (1)
- Fly-By-Wire - Wikipedia PDFDocument56 pagesFly-By-Wire - Wikipedia PDFPoonam YadavNo ratings yet
- Introduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsFrom EverandIntroduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsNo ratings yet
- Fly by WireDocument8 pagesFly by WireMOFEEZALAMNo ratings yet
- Fly by WireDocument28 pagesFly by WireRam RathoreNo ratings yet
- 103 Fly-By-WireDocument3 pages103 Fly-By-WireSimran TyagiNo ratings yet
- Airbus FBWDocument22 pagesAirbus FBWVikram DograNo ratings yet
- Cec336-Avionics Systems Question BankDocument14 pagesCec336-Avionics Systems Question BankManikandan NNo ratings yet
- Development of Flight Control SystemsDocument7 pagesDevelopment of Flight Control SystemsSathya NarayananNo ratings yet
- Fly by Wire ConceptDocument20 pagesFly by Wire ConceptSanjay RameshNo ratings yet
- Aircraft flight control systemsDocument6 pagesAircraft flight control systemsprincegodnilNo ratings yet
- A Family of Fault-Tolerant Systems AIRBUSDocument8 pagesA Family of Fault-Tolerant Systems AIRBUSlyajdstcNo ratings yet
- Avionics: Unit III Electronic Flight Control SystemsDocument54 pagesAvionics: Unit III Electronic Flight Control SystemsNagaraja BhagavNo ratings yet
- U17AEI7203 Lecture 1Document4 pagesU17AEI7203 Lecture 1SenthilKumarSNo ratings yet
- Fly by WireDocument2 pagesFly by WireAmit VarmaNo ratings yet
- Fly by Wire AncienDocument40 pagesFly by Wire Anciennkfrpro90No ratings yet
- Flight control laws explained for Airbus and Boeing aircraftDocument14 pagesFlight control laws explained for Airbus and Boeing aircraftJivendra KumarNo ratings yet
- Avionics: Unit III Electronic Flight Control SystemsDocument36 pagesAvionics: Unit III Electronic Flight Control SystemsNagaraja BhagavNo ratings yet
- A320 Pic - Fly by WireDocument7 pagesA320 Pic - Fly by WirefrediNo ratings yet
- Autopilot - WikipediaDocument5 pagesAutopilot - Wikipediarpraj3135No ratings yet
- Aircraft flight control systems guideDocument11 pagesAircraft flight control systems guideBhupendra SinghNo ratings yet
- Falcon 7X-Aircraft IntroductionDocument67 pagesFalcon 7X-Aircraft IntroductionMarian RotaruNo ratings yet
- The Basic Analysis of Control Systems On Commercial AircraftDocument7 pagesThe Basic Analysis of Control Systems On Commercial AircraftAzmah EskandriNo ratings yet
- Flight Control LawsDocument9 pagesFlight Control LawsSreeja SunderNo ratings yet
- Aircraft Control SystemDocument36 pagesAircraft Control SystemPrabhu Mani RathinamNo ratings yet
- Airbus Fly-By-Wire: A Process Toward Total DependabilityDocument10 pagesAirbus Fly-By-Wire: A Process Toward Total DependabilitylacrimogenoNo ratings yet
- AFS Auto Flight System OverviewDocument43 pagesAFS Auto Flight System OverviewVenkatakumar Chowdary KarlakuntaNo ratings yet
- 777 Design ArticleDocument16 pages777 Design Articlesureshams100% (1)
- Flight ControlsDocument3 pagesFlight ControlsLoc Das NeyfusNo ratings yet
- Falcon 7X-Aircraft Introduction PDFDocument67 pagesFalcon 7X-Aircraft Introduction PDFBhaskerNegi100% (2)
- Dassault Falcon 7X Systems SummaryDocument67 pagesDassault Falcon 7X Systems SummaryBhaskerNegi100% (1)
- Autopilot Guide Aircraft Without HumanDocument5 pagesAutopilot Guide Aircraft Without HumanPrabhu Mani RathinamNo ratings yet
- A320 Flight Controls PaperDocument8 pagesA320 Flight Controls PaperVatsal VakhariaNo ratings yet
- Aircraft Flight Control Laws ExplainedDocument8 pagesAircraft Flight Control Laws ExplaineduttamkavitaNo ratings yet
- Digital Flight Control SystemDocument2 pagesDigital Flight Control SystemKannappan CtNo ratings yet
- Fly by Wire and Fly by OpticsDocument7 pagesFly by Wire and Fly by OpticsvenkatsahulNo ratings yet
- Theory AssignmentDocument3 pagesTheory AssignmentDan WkNo ratings yet
- Assignment AutomationDocument7 pagesAssignment AutomationSheeza FarooqNo ratings yet
- Boeing Autopilot DesignDocument6 pagesBoeing Autopilot Designzeuscaan88No ratings yet
- Aircraft Control SystemDocument145 pagesAircraft Control Systemabdel4aliNo ratings yet
- UAV AutoPilot PDFDocument6 pagesUAV AutoPilot PDFMococo CatNo ratings yet
- Avionics Unit IDocument22 pagesAvionics Unit IKalaimani NNo ratings yet
- Aircraft flight control overviewDocument5 pagesAircraft flight control overviewVS KRISHNA KUMARNo ratings yet
- Automatic Flight ControlDocument24 pagesAutomatic Flight ControlSade Zamy100% (1)
- Military Aircraft Flight ControlDocument14 pagesMilitary Aircraft Flight ControlScarlat ElenaNo ratings yet
- Feature Article: Commercial Aviation'S Digital RevolutionDocument8 pagesFeature Article: Commercial Aviation'S Digital RevolutionDarwin GacutanNo ratings yet
- Avionics Unit 1 NotesDocument26 pagesAvionics Unit 1 NotesGowri ShankarNo ratings yet
- Falcon 7X-Aircraft IntroductionDocument67 pagesFalcon 7X-Aircraft IntroductionJames Bevin100% (1)
- AvionicsDocument24 pagesAvionicsNambi Rajan100% (2)
- FBW System FeaturesDocument93 pagesFBW System FeaturesNagaraja BhagavNo ratings yet
- Typical Avionics Sub SystemsWorld Sensor and Task AutomationDocument3 pagesTypical Avionics Sub SystemsWorld Sensor and Task AutomationvickyNo ratings yet
- Boeing 777 Fly by WireDocument20 pagesBoeing 777 Fly by WireGurudutt PaiNo ratings yet
- Aircraft Cockpit InstrumentsDocument3 pagesAircraft Cockpit InstrumentsFarah KhanNo ratings yet
- Pratejas Tomar's Report on Fly-By-Wire SystemsDocument13 pagesPratejas Tomar's Report on Fly-By-Wire SystemsSidhartha MauryaNo ratings yet
- Full Authority Digital Engine ControlDocument17 pagesFull Authority Digital Engine Controlberjarry5938100% (2)
- AIRBUS A320/A330/A340 Electrical Flight Controls A Family of Fault-Tolerant SystemsDocument8 pagesAIRBUS A320/A330/A340 Electrical Flight Controls A Family of Fault-Tolerant SystemsNour El-Din SafwatNo ratings yet
- Flight Control Surfaces 2Document10 pagesFlight Control Surfaces 2walterNo ratings yet
- Hyponymy and Hypernymy: Jump To Navigationjump To SearchDocument8 pagesHyponymy and Hypernymy: Jump To Navigationjump To SearchSteven HamNo ratings yet
- Greek Language: Jump To Navigation Jump To SearchDocument22 pagesGreek Language: Jump To Navigation Jump To SearchSteven HamNo ratings yet
- Albania: Jump To Navigation Jump To SearchDocument70 pagesAlbania: Jump To Navigation Jump To SearchSteven HamNo ratings yet
- Limited Recognition States ListDocument2 pagesLimited Recognition States ListSteven HamNo ratings yet
- Southeast EuropeDocument1 pageSoutheast EuropeSteven HamNo ratings yet
- History Painting: Jump To Navigation Jump To SearchDocument18 pagesHistory Painting: Jump To Navigation Jump To SearchSteven HamNo ratings yet
- William Etty: Jump To Navigation Jump To SearchDocument83 pagesWilliam Etty: Jump To Navigation Jump To SearchSteven HamNo ratings yet
- BalkansDocument3 pagesBalkansSteven HamNo ratings yet
- History: Human History History (Disambiguation)Document29 pagesHistory: Human History History (Disambiguation)Steven HamNo ratings yet
- History: Human History History (Disambiguation)Document29 pagesHistory: Human History History (Disambiguation)Steven HamNo ratings yet
- Hyponymy and Hypernymy: Jump To Navigationjump To SearchDocument8 pagesHyponymy and Hypernymy: Jump To Navigationjump To SearchSteven HamNo ratings yet
- The Sirens of UlyssesDocument9 pagesThe Sirens of UlyssesSteven HamNo ratings yet
- William Etty: Jump To Navigation Jump To SearchDocument83 pagesWilliam Etty: Jump To Navigation Jump To SearchSteven HamNo ratings yet
- The Sirens of UlyssesDocument9 pagesThe Sirens of UlyssesSteven HamNo ratings yet
- History Painting: Jump To Navigation Jump To SearchDocument18 pagesHistory Painting: Jump To Navigation Jump To SearchSteven HamNo ratings yet
- Hyponymy and Hypernymy: Jump To Navigationjump To SearchDocument8 pagesHyponymy and Hypernymy: Jump To Navigationjump To SearchSteven HamNo ratings yet
- Parable of The Good Samaritan: Jump To Navigationjump To SearchDocument18 pagesParable of The Good Samaritan: Jump To Navigationjump To SearchSteven HamNo ratings yet
- Space Shuttle: Jump To Navigation Jump To SearchDocument12 pagesSpace Shuttle: Jump To Navigation Jump To SearchSteven HamNo ratings yet
- Kinship: Jump To Navigation Jump To SearchDocument26 pagesKinship: Jump To Navigation Jump To SearchSteven HamNo ratings yet
- Patrilineality: Anthropology ofDocument5 pagesPatrilineality: Anthropology ofSteven HamNo ratings yet
- Levite: Jump To Navigation Jump To SearchDocument12 pagesLevite: Jump To Navigation Jump To SearchSteven HamNo ratings yet
- Flight Envelope ProtectionDocument6 pagesFlight Envelope ProtectionSteven HamNo ratings yet
- User InterfaceDocument9 pagesUser InterfaceSteven HamNo ratings yet
- Mediawiki Markup Language: Editing Display ShowingDocument18 pagesMediawiki Markup Language: Editing Display ShowingSteven HamNo ratings yet
- Digital Research: Jump To Navigation Jump To SearchDocument6 pagesDigital Research: Jump To Navigation Jump To SearchSteven HamNo ratings yet
- 20 KENDALL 3079 ATF Guide Revised August 2020Document48 pages20 KENDALL 3079 ATF Guide Revised August 2020Mohammed BabatinNo ratings yet
- Red Bus Ticket 24241791 PDFDocument2 pagesRed Bus Ticket 24241791 PDFRohitash MoondNo ratings yet
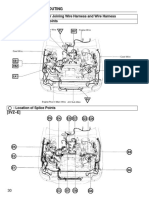
- Electrical Wiring Connector LocationsDocument8 pagesElectrical Wiring Connector LocationsJosue Carlos Choque GomezNo ratings yet
- TYPES OF PASSENGER COACHES FOR DIFFERENT RAILWAY SERVICESDocument79 pagesTYPES OF PASSENGER COACHES FOR DIFFERENT RAILWAY SERVICESVenkatesh Sreegirisetty0% (1)
- Module 6 Transport CostingDocument5 pagesModule 6 Transport Costingayesha parveenNo ratings yet
- 0 0 4111412412161TypicalCrossSectionKm351to385 PDFDocument6 pages0 0 4111412412161TypicalCrossSectionKm351to385 PDFSamara ConsultantNo ratings yet
- Service MarketingDocument16 pagesService MarketingSunayna PanigrahiNo ratings yet
- 2020 Course ScheduleDocument1 page2020 Course ScheduleChichi JnrNo ratings yet
- MTTM Complete SyllabusDocument29 pagesMTTM Complete SyllabusSumit Kumar SinghNo ratings yet
- Mahindra & Mahindra-2Document52 pagesMahindra & Mahindra-2Satyam TapodhanNo ratings yet
- Unit4 HUM RemainsDocument17 pagesUnit4 HUM RemainsP VIVEKNo ratings yet
- Learning Licence Test Rules of Road Regulations EnglishDocument26 pagesLearning Licence Test Rules of Road Regulations Englishu2mailrahulNo ratings yet
- Passenger e-ticket itinerary for Chennai to Delhi flightDocument4 pagesPassenger e-ticket itinerary for Chennai to Delhi flightVyasRmNo ratings yet
- Maglev Paper PresentationDocument12 pagesMaglev Paper Presentationaditya_kumar_me100% (1)
- Mercedes Benz ML 350 4MATIC W166 V6-3.5L M276 - Component Locations PDocument73 pagesMercedes Benz ML 350 4MATIC W166 V6-3.5L M276 - Component Locations PRodolfo Diaz100% (1)
- How Truck Size and Weight Impact Bridge InvestmentDocument13 pagesHow Truck Size and Weight Impact Bridge InvestmentRaditya AzkaLaodeNo ratings yet
- Model 800 Series Telescopic Boom LiftsDocument6 pagesModel 800 Series Telescopic Boom LiftsForklift Systems IncorporatedNo ratings yet
- Component Parts of A Permanent WayDocument37 pagesComponent Parts of A Permanent WaySehleBasheerNo ratings yet
- CL504 Transportation Engineering I: Prepared By: Prof. Hemang DalwadiDocument7 pagesCL504 Transportation Engineering I: Prepared By: Prof. Hemang DalwadiKevin ShahNo ratings yet
- Finnish Velo CarsDocument4 pagesFinnish Velo CarsThomas Wiesner100% (3)
- Matiz Car MaheshDocument12 pagesMatiz Car MaheshMahesh GowdaNo ratings yet
- Alfa Romeo Giulietta 1.4 Turbo MultiAir Business 2012 Tech SpecsDocument2 pagesAlfa Romeo Giulietta 1.4 Turbo MultiAir Business 2012 Tech SpecsexnihilogNo ratings yet
- Trains Magazine Locotrol FeatureDocument6 pagesTrains Magazine Locotrol FeatureRaj ThakurNo ratings yet
- Hatfield Rail Crash - WikipediaDocument7 pagesHatfield Rail Crash - WikipediashadowattackNo ratings yet
- A330Checklist JarDesign 2017Document4 pagesA330Checklist JarDesign 2017couvesazuisNo ratings yet
- Drill RecordDocument1 pageDrill RecordDarwin DinarTataNo ratings yet
- C.A.T.T.C.H. (California Temporary Traffic Control Handbook)Document81 pagesC.A.T.T.C.H. (California Temporary Traffic Control Handbook)PritpalNo ratings yet
- Hyperloop's Social ImpactsDocument3 pagesHyperloop's Social ImpactsMahnoor BajwaNo ratings yet
- q8 SB e Tron 55 Pricelist 2023Document2 pagesq8 SB e Tron 55 Pricelist 2023YK TangNo ratings yet
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- Sully: The Untold Story Behind the Miracle on the HudsonFrom EverandSully: The Untold Story Behind the Miracle on the HudsonRating: 4 out of 5 stars4/5 (103)
- Hero Found: The Greatest POW Escape of the Vietnam WarFrom EverandHero Found: The Greatest POW Escape of the Vietnam WarRating: 4 out of 5 stars4/5 (19)
- The Fabric of Civilization: How Textiles Made the WorldFrom EverandThe Fabric of Civilization: How Textiles Made the WorldRating: 4.5 out of 5 stars4.5/5 (57)
- Transformed: Moving to the Product Operating ModelFrom EverandTransformed: Moving to the Product Operating ModelRating: 4 out of 5 stars4/5 (1)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaFrom EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNo ratings yet
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyFrom EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNo ratings yet
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationFrom EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationRating: 4.5 out of 5 stars4.5/5 (46)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestFrom EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestRating: 4 out of 5 stars4/5 (28)
- The Weather Machine: A Journey Inside the ForecastFrom EverandThe Weather Machine: A Journey Inside the ForecastRating: 3.5 out of 5 stars3.5/5 (31)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseFrom EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseRating: 4.5 out of 5 stars4.5/5 (50)
- The Quiet Zone: Unraveling the Mystery of a Town Suspended in SilenceFrom EverandThe Quiet Zone: Unraveling the Mystery of a Town Suspended in SilenceRating: 3.5 out of 5 stars3.5/5 (23)
- The End of Craving: Recovering the Lost Wisdom of Eating WellFrom EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellRating: 4.5 out of 5 stars4.5/5 (80)
- 35 Miles From Shore: The Ditching and Rescue of ALM Flight 980From Everand35 Miles From Shore: The Ditching and Rescue of ALM Flight 980Rating: 4 out of 5 stars4/5 (21)
- Recording Unhinged: Creative and Unconventional Music Recording TechniquesFrom EverandRecording Unhinged: Creative and Unconventional Music Recording TechniquesNo ratings yet
- Pale Blue Dot: A Vision of the Human Future in SpaceFrom EverandPale Blue Dot: A Vision of the Human Future in SpaceRating: 4.5 out of 5 stars4.5/5 (586)
- The Path Between the Seas: The Creation of the Panama Canal, 1870-1914From EverandThe Path Between the Seas: The Creation of the Panama Canal, 1870-1914Rating: 4.5 out of 5 stars4.5/5 (124)
- A Place of My Own: The Architecture of DaydreamsFrom EverandA Place of My Own: The Architecture of DaydreamsRating: 4 out of 5 stars4/5 (241)
- Reality+: Virtual Worlds and the Problems of PhilosophyFrom EverandReality+: Virtual Worlds and the Problems of PhilosophyRating: 4 out of 5 stars4/5 (24)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseFrom EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseRating: 3.5 out of 5 stars3.5/5 (12)
- The Future of Geography: How the Competition in Space Will Change Our WorldFrom EverandThe Future of Geography: How the Competition in Space Will Change Our WorldRating: 4.5 out of 5 stars4.5/5 (4)
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreFrom EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreRating: 4.5 out of 5 stars4.5/5 (33)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureFrom EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureRating: 5 out of 5 stars5/5 (125)