You might also like
- (TailieuVNU - Com) - Slide-Tin-hieu-He-thong-Lesson-2-Introduction-to-systems-Hoang-Gia-Hung-UETDocument16 pages(TailieuVNU - Com) - Slide-Tin-hieu-He-thong-Lesson-2-Introduction-to-systems-Hoang-Gia-Hung-UETPhạm Văn ChiếnNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Signals Systems Lecture 12 FT Analysis TransmissionDocument20 pagesSignals Systems Lecture 12 FT Analysis TransmissionkentNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- OPERATION IN SYSTEMDocument16 pagesOPERATION IN SYSTEMHerdy Sang JuaraNo ratings yet
- Experiment No.1 I DSP TMS320C6713 DSK & O DT & Matlab: Lab Manual EEE324 Digital Signal ProcessingDocument14 pagesExperiment No.1 I DSP TMS320C6713 DSK & O DT & Matlab: Lab Manual EEE324 Digital Signal ProcessingMirza Riyasat AliNo ratings yet
- Experiment No.1 I DSP TMS320C6713 DSK & O DT & Matlab: Lab Manual EEE324 Digital Signal ProcessingDocument27 pagesExperiment No.1 I DSP TMS320C6713 DSK & O DT & Matlab: Lab Manual EEE324 Digital Signal ProcessingMirza Riyasat AliNo ratings yet
- Chapter 3 - Control System ModellingDocument21 pagesChapter 3 - Control System ModellingMustafa ManapNo ratings yet
- EEE 3153-Control System: Lecture On ControllersDocument32 pagesEEE 3153-Control System: Lecture On ControllersShojeb ShojolNo ratings yet
- System Identification L7Document4 pagesSystem Identification L7hawrasdqNo ratings yet
- Matlab Simulation of First and Second Order Systems PerformanceDocument6 pagesMatlab Simulation of First and Second Order Systems PerformanceAbdul Rehman AfzalNo ratings yet
- Military Institute of Science & Technology: Experiment No. 8Document10 pagesMilitary Institute of Science & Technology: Experiment No. 8ramisa rizwanNo ratings yet
- Lecture 23 Ece4330tDocument58 pagesLecture 23 Ece4330tmanse yukiNo ratings yet
- Transfer Function ModellingDocument31 pagesTransfer Function ModellinglvrevathiNo ratings yet
- Chapter 2-1 PDFDocument70 pagesChapter 2-1 PDFtazeb100% (2)
- Lecture 8Document14 pagesLecture 8Joesph SamiNo ratings yet
- Digital Representation Sept 4-5-11 12Document33 pagesDigital Representation Sept 4-5-11 12Shravani KodeNo ratings yet
- Sistem Kendali Digital - Week 2-1-1Document35 pagesSistem Kendali Digital - Week 2-1-1Dedi BobNo ratings yet
- 26 Control Engineering LAbDocument50 pages26 Control Engineering LAbEashan PendseNo ratings yet
- 4.1 - Analysis Based On Transfer FunctionDocument56 pages4.1 - Analysis Based On Transfer FunctionMarceloNo ratings yet
- 1 SignalsDocument17 pages1 SignalsTingyang YUNo ratings yet
- Bangladesh University of Engineering and TechnologyDocument10 pagesBangladesh University of Engineering and Technologyabbas uddinNo ratings yet
- LAB 9 - Multirate SamplingDocument8 pagesLAB 9 - Multirate SamplingM Hassan BashirNo ratings yet
- Lecture 8Document28 pagesLecture 8Zamshed FormanNo ratings yet
- Automatic Control-Chapter2 - ModelingFrequencyDocument24 pagesAutomatic Control-Chapter2 - ModelingFrequencyFiras Abu talebNo ratings yet
- System Output Desired InputDocument4 pagesSystem Output Desired InputPrince WyneNo ratings yet
- Ch.03 Chuẩn 1Document29 pagesCh.03 Chuẩn 1Tam PhamNo ratings yet
- Ss 1-4Document158 pagesSs 1-4Abhimanyu PerumalNo ratings yet
- Control System Manual 1 To 5Document23 pagesControl System Manual 1 To 5Eashan PendseNo ratings yet
- Control Systems Lab #3: Stability AnalysisDocument5 pagesControl Systems Lab #3: Stability Analysisahmed shahNo ratings yet
- Fuzzy Sliding Mode Control and EKF for Noisy Chemical ReactorsDocument7 pagesFuzzy Sliding Mode Control and EKF for Noisy Chemical ReactorsHildebrando CastroNo ratings yet
- Effect of Input Waveform, Loop Gain & System Type on Steady State ErrorDocument5 pagesEffect of Input Waveform, Loop Gain & System Type on Steady State Errorramisa rizwanNo ratings yet
- ECEE2520 PS 10 2021 Sec1Document4 pagesECEE2520 PS 10 2021 Sec1Timmy QuinnNo ratings yet
- Review: ( ) ( ) ( ) 0 Is A Complex Number, I.eDocument77 pagesReview: ( ) ( ) ( ) 0 Is A Complex Number, I.eجلال عواد كاظم جودةNo ratings yet
- DSP Lab Report on Discrete Time SystemsDocument6 pagesDSP Lab Report on Discrete Time SystemsBharat UdayNo ratings yet
- Lecture 4Document7 pagesLecture 4akhbar elyoum academyNo ratings yet
- Week 4Document55 pagesWeek 4Raising StarNo ratings yet
- Mechanical Measurements - 4Document14 pagesMechanical Measurements - 4فضائح لا تصدقNo ratings yet
- Unit 4Document10 pagesUnit 4GurunathanNo ratings yet
- Practice 2. Gic: Direccion@ece - Buap.mxDocument4 pagesPractice 2. Gic: Direccion@ece - Buap.mxJose Juan MendozaNo ratings yet
- Time Response AnalysisDocument51 pagesTime Response AnalysisAbdulrahmanNo ratings yet
- 6 - Lecture 6 - Jury Stability - (2nd Term 2021-2022)Document12 pages6 - Lecture 6 - Jury Stability - (2nd Term 2021-2022)Artist AbramNo ratings yet
- DIGITAL SIGNAL PROCESSING LAB: IMPLEMENTATION OF HP IIR FILTERDocument12 pagesDIGITAL SIGNAL PROCESSING LAB: IMPLEMENTATION OF HP IIR FILTERLokam AvanthikaNo ratings yet
- Ave3101 Acs Week4Document42 pagesAve3101 Acs Week4Tuğrul YazganNo ratings yet
- Assignment 1Document3 pagesAssignment 1dharmNo ratings yet
- PH Distribution in System ReliabilityDocument102 pagesPH Distribution in System ReliabilityMochamad Nur QomarudinNo ratings yet
- Lag network characterizationDocument58 pagesLag network characterizationJustin Jose PNo ratings yet
- DSP Chapter 2 Part 1Document7 pagesDSP Chapter 2 Part 1Jass nnNo ratings yet
- DPCMDocument13 pagesDPCM20ELB355 MOHAMMAD ESAAMNo ratings yet
- Adaptive Control Theory: Pole-Placement and Indirect STRDocument48 pagesAdaptive Control Theory: Pole-Placement and Indirect STRThanh NguyenNo ratings yet
- Transient and Steady State Response SlideDocument19 pagesTransient and Steady State Response SlideMd. Shahriar MohtasimNo ratings yet
- Correlation Spectral Density AM Aug 10Document8 pagesCorrelation Spectral Density AM Aug 10vishal kumarNo ratings yet
- Ilovepdf Merged-4Document118 pagesIlovepdf Merged-4رشا روروNo ratings yet
- Informe IEEE - Baltazar - Palma - ParedesDocument12 pagesInforme IEEE - Baltazar - Palma - ParedesBranco Palma RodriguezNo ratings yet
- Introduction To Digital Communications 1st Edition Grami Solutions ManualDocument49 pagesIntroduction To Digital Communications 1st Edition Grami Solutions ManualRoyBartonnidcf100% (13)
- Lecture 13 Ece4330tDocument54 pagesLecture 13 Ece4330tHamza AteeqNo ratings yet
- Material 5 - Time Domain Response Analysis-1Document6 pagesMaterial 5 - Time Domain Response Analysis-1Ninggar TitanNo ratings yet
- Our Official Android App - REJINPAUL NETWORK FromDocument3 pagesOur Official Android App - REJINPAUL NETWORK FrommanojNo ratings yet
- Fault Detection Based On Observer For Nonlinear Dynamic Power SystemDocument8 pagesFault Detection Based On Observer For Nonlinear Dynamic Power SystemAbdulazeez Ayomide AdebimpeNo ratings yet
- Apply For Ethiopian Passport OnlineDocument1 pageApply For Ethiopian Passport Onlinewondi BET100% (1)
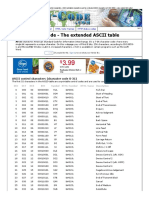
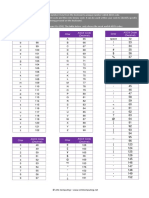
- ASCII Code The Extended ASCII Table: Ascii Art HTML Symbol HTML Color NamesDocument7 pagesASCII Code The Extended ASCII Table: Ascii Art HTML Symbol HTML Color NamesMuhammad Sheharyar MohsinNo ratings yet
- Design of Amharic Teleprinter (Teletype) : by Raswork, The Imperial Board EthiopiaDocument7 pagesDesign of Amharic Teleprinter (Teletype) : by Raswork, The Imperial Board Ethiopiawondi BETNo ratings yet
- ASCII Table: Vari Able AssignmentDocument1 pageASCII Table: Vari Able AssignmentAshok KumarNo ratings yet
- Thermal Printer: Programmer's Guide (Edition 2018)Document154 pagesThermal Printer: Programmer's Guide (Edition 2018)wondi BETNo ratings yet
- Induction Motor: by Ashvani Shukla Manager (C&I) BGR EnergyDocument15 pagesInduction Motor: by Ashvani Shukla Manager (C&I) BGR Energywondi BETNo ratings yet
- Multi-Lingual Label Printing With Unicode: White PaperDocument13 pagesMulti-Lingual Label Printing With Unicode: White Paperwondi BETNo ratings yet
- Ethiopian ICT Glossary PDFDocument240 pagesEthiopian ICT Glossary PDFDaniel FikreNo ratings yet
- "Final Year Ece Projects in Chennai, Bangalore, Vijayawada, Kakinada." GoodDocument18 pages"Final Year Ece Projects in Chennai, Bangalore, Vijayawada, Kakinada." Goodwondi BETNo ratings yet
- Detection of Fault of Three Phase Induction Motor Using Arduino Uno R2 MicrocontrollerDocument3 pagesDetection of Fault of Three Phase Induction Motor Using Arduino Uno R2 Microcontrollerwondi BETNo ratings yet
- Advance Information: 128 X 64 Dot Matrix OLED/PLED Segment/Common Driver With ControllerDocument65 pagesAdvance Information: 128 X 64 Dot Matrix OLED/PLED Segment/Common Driver With ControllerKrishna Sg100% (1)
- I C H T S: 2 Umidity AND Emperature EnsorDocument36 pagesI C H T S: 2 Umidity AND Emperature Ensorwondi BETNo ratings yet
- Python Cheat Sheet: 1. PrimitivesDocument12 pagesPython Cheat Sheet: 1. Primitivesstrasys1No ratings yet
- Proteus VSMDocument2 pagesProteus VSMbouje72No ratings yet
- PLCC2835 0.5W EdisonDocument17 pagesPLCC2835 0.5W Edisonwondi BETNo ratings yet
- Python Cheat SheetDocument1 pagePython Cheat Sheetkerplah218No ratings yet
- Microcontroller Based Detection and ProtDocument3 pagesMicrocontroller Based Detection and Protwondi BETNo ratings yet
- NCSOSET4Document5 pagesNCSOSET4wondi BETNo ratings yet
- Microcontroller Based Fault Detection and Protection of Three Phase Induction Motor Against Abnormal ConditionsDocument9 pagesMicrocontroller Based Fault Detection and Protection of Three Phase Induction Motor Against Abnormal ConditionstianNo ratings yet
- Projects - Document - Controller CVDocument1 pageProjects - Document - Controller CVREH 300 TM ProjectNo ratings yet
- Microcontroller Based Detection and ProtDocument3 pagesMicrocontroller Based Detection and Protwondi BETNo ratings yet
- Induction Motor Protection Using Micro Controller: NtroductionDocument5 pagesInduction Motor Protection Using Micro Controller: Ntroductionwondi BETNo ratings yet
- Protection of Three Phase Induction Motor Using MicrocontrollerDocument3 pagesProtection of Three Phase Induction Motor Using Microcontrollerwondi BETNo ratings yet
- IJERT 3 Phase Induction Motor ProtectionDocument3 pagesIJERT 3 Phase Induction Motor Protectionwondi BETNo ratings yet
- F3 BP 2017 Ibatullayev Aibek Bachelor Thesis Aibek - IbatullayevDocument46 pagesF3 BP 2017 Ibatullayev Aibek Bachelor Thesis Aibek - IbatullayevMir AamirNo ratings yet
- Induction Motor Protection Using Micro Controller: NtroductionDocument5 pagesInduction Motor Protection Using Micro Controller: Ntroductionwondi BETNo ratings yet
- An Improved Method For Protection of Induction Motor Using MicrocontrollerDocument64 pagesAn Improved Method For Protection of Induction Motor Using Microcontrollerwondi BETNo ratings yet
- Control and Computer Chapter1 2013Document45 pagesControl and Computer Chapter1 2013wondi BETNo ratings yet
- Delta Convolution PDFDocument16 pagesDelta Convolution PDFSanchit GuptaNo ratings yet
- Taxation Management AssignmentDocument11 pagesTaxation Management AssignmentniraliNo ratings yet
- ES Model Question Paper With Solution KeyDocument10 pagesES Model Question Paper With Solution Keyvidhya_bineeshNo ratings yet
- SAP ABAP Interview Questions and AnswersDocument8 pagesSAP ABAP Interview Questions and AnswersKarthi ThirumalaisamyNo ratings yet
- Apparent Dip PDFDocument2 pagesApparent Dip PDFanon_114803412No ratings yet
- WholeDocument397 pagesWholedelbot01No ratings yet
- African in The Modern WorldDocument18 pagesAfrican in The Modern WorldSally AnkomaahNo ratings yet
- (MATH1013) (2016) (F) Midterm Wsuab 41338Document9 pages(MATH1013) (2016) (F) Midterm Wsuab 41338陳希程No ratings yet
- V200 User ManualDocument171 pagesV200 User ManualuriahskyNo ratings yet
- Large Generators WEBDocument16 pagesLarge Generators WEBMaycon MaranNo ratings yet
- Gray Iron Castings: Standard Specification ForDocument6 pagesGray Iron Castings: Standard Specification Forsafak kahramanNo ratings yet
- TEFL I Course Prepares Students to Teach EnglishDocument8 pagesTEFL I Course Prepares Students to Teach EnglishErma DomosNo ratings yet
- Language in UseDocument1 pageLanguage in UseEvaNo ratings yet
- Module 3 - Tennnis: Cit Colleges of Paniqui Foundation IncDocument14 pagesModule 3 - Tennnis: Cit Colleges of Paniqui Foundation IncLahra BalanciaNo ratings yet
- Lyrics: Original Songs: - JW BroadcastingDocument56 pagesLyrics: Original Songs: - JW BroadcastingLucky MorenoNo ratings yet
- Uconnect User GuideDocument113 pagesUconnect User GuidetamilarasansrtNo ratings yet
- Capacity Based On Shear Parameters As Per IS 6403: C C C C W Q Q Q Q F y y y yDocument5 pagesCapacity Based On Shear Parameters As Per IS 6403: C C C C W Q Q Q Q F y y y yKishore KumarNo ratings yet
- Sustainability - Research PaperDocument18 pagesSustainability - Research PapermrigssNo ratings yet
- Course Outline TP WindowsDocument6 pagesCourse Outline TP WindowsAnonymous PcPkRpAKD5No ratings yet
- READING U8Document4 pagesREADING U8Như TrầnNo ratings yet
- Tugas 3vDocument4 pagesTugas 3vRomie SyafitraNo ratings yet
- Gripper of FTV Invisio Panels For Horizontal FacadeDocument16 pagesGripper of FTV Invisio Panels For Horizontal FacadefghfNo ratings yet
- Professional Education ReviewerDocument22 pagesProfessional Education ReviewerJustine WicoNo ratings yet
- About WELDA Anchor PlateDocument1 pageAbout WELDA Anchor PlateFircijevi KurajberiNo ratings yet
- 01 - Narmada M PhilDocument200 pages01 - Narmada M PhilafaceanNo ratings yet
- HTML MCQDocument22 pagesHTML MCQBuxar Students LifeNo ratings yet
- Design Report For Proposed 3storied ResidentialbuildingDocument35 pagesDesign Report For Proposed 3storied ResidentialbuildingMohamed RinosNo ratings yet
- Science Grade 7Document8 pagesScience Grade 7Lacus ClyneNo ratings yet
- Bismillah Skripsi Herlina Rozaaaa-1Document57 pagesBismillah Skripsi Herlina Rozaaaa-1Saidi NetNo ratings yet
- Jim Dunlop Rotovibe Owners ManualDocument2 pagesJim Dunlop Rotovibe Owners ManualRick RingNo ratings yet
- Brute Force AttacksDocument9 pagesBrute Force AttacksAKSHITNo ratings yet