You might also like
- Control System Manual 1 To 5Document23 pagesControl System Manual 1 To 5Eashan PendseNo ratings yet
- Time Respons: Dasar Sistem KontrolDocument15 pagesTime Respons: Dasar Sistem KontrolitmyNo ratings yet
- 1 Lab Manual-Final-Control-System-1Document35 pages1 Lab Manual-Final-Control-System-1Shimalis RetaNo ratings yet
- Control System Fundamental: Time Response AnalysisDocument77 pagesControl System Fundamental: Time Response Analysisoneisa92100% (1)
- Determine step & impulse response of 1st order feedback systemDocument2 pagesDetermine step & impulse response of 1st order feedback systemsaumya desai100% (1)
- 6 - Time Response Analysis 2Document21 pages6 - Time Response Analysis 2حساب ويندوزNo ratings yet
- LCS 1st Lab ManualDocument14 pagesLCS 1st Lab ManualWaleed QureshiNo ratings yet
- Transient & Steady State Response AnalysisDocument46 pagesTransient & Steady State Response AnalysisSwati AgarwalNo ratings yet
- Lab - 06 56Document23 pagesLab - 06 56MEEN201101056 KFUEITNo ratings yet
- CS Mod3@AzDOCUMENTS - inDocument46 pagesCS Mod3@AzDOCUMENTS - insssNo ratings yet
- Time Respons: Dasar Sistem KontrolDocument13 pagesTime Respons: Dasar Sistem KontrolitmyNo ratings yet
- Control Systems K-NotesDocument33 pagesControl Systems K-NotesvidhikhabyaNo ratings yet
- Open Loop Closed LoopDocument12 pagesOpen Loop Closed LoopKarthik RamNo ratings yet
- UntitledDocument62 pagesUntitledMagarsaa Qana'iiNo ratings yet
- Ae Lab ManualDocument52 pagesAe Lab ManualaryakalekattuNo ratings yet
- Chap No.3 Time Response and Stability AnalysisDocument71 pagesChap No.3 Time Response and Stability AnalysissomefactaNo ratings yet
- Matlab Simulation of First and Second Order Systems PerformanceDocument6 pagesMatlab Simulation of First and Second Order Systems PerformanceAbdul Rehman AfzalNo ratings yet
- Time Domain Analysis of First Order SystemsDocument9 pagesTime Domain Analysis of First Order Systemsجلال عواد كاظم جودةNo ratings yet
- Motor Modeling and Position Control Lab Week 3: Closed Loop ControlDocument14 pagesMotor Modeling and Position Control Lab Week 3: Closed Loop ControlJanett TrujilloNo ratings yet
- UntitledDocument32 pagesUntitledMasudur RahmanNo ratings yet
- Transient and Steady-State Response Analyses: TR SsDocument4 pagesTransient and Steady-State Response Analyses: TR SsmornyNo ratings yet
- Time Response AnalysisDocument19 pagesTime Response AnalysisPandimadevi GanesanNo ratings yet
- Control Systems Cat 1 & 2Document27 pagesControl Systems Cat 1 & 2nongdambaNo ratings yet
- 1-Module3 - Time Domain AnalysisDocument12 pages1-Module3 - Time Domain AnalysisShashankaNo ratings yet
- FeedCon (Unit 3)Document39 pagesFeedCon (Unit 3)engrwhoNo ratings yet
- Presentation For ControllerDocument42 pagesPresentation For ControllerAlakshendra JohariNo ratings yet
- Control System 2MARKSDocument16 pagesControl System 2MARKSSeekay Alais Karuppaiah CNo ratings yet
- Control system labDocument15 pagesControl system labhassan ullah khanNo ratings yet
- Unit-5 Measurement and Control SystemDocument30 pagesUnit-5 Measurement and Control SystemDavinder SinghNo ratings yet
- RLC Transfer Function AnalysisDocument38 pagesRLC Transfer Function AnalysisMarasigan Ryan50% (2)
- Introduction To First Order SystemsDocument4 pagesIntroduction To First Order SystemsSyafiiqahNo ratings yet
- Time Response of Second Order SystemDocument6 pagesTime Response of Second Order SystempraneethNo ratings yet
- First Order SystemDocument21 pagesFirst Order SystemNiranjan BeheraNo ratings yet
- Simulink Basics TutorialDocument143 pagesSimulink Basics TutorialHiếu HuỳnhNo ratings yet
- Second Order SystemDocument11 pagesSecond Order SystemSaravanan SukumaranNo ratings yet
- Control Systems K-NotesDocument35 pagesControl Systems K-NotesAkashGaurav100% (1)
- Ec Formula Notes 11Document369 pagesEc Formula Notes 11Tharun kondaNo ratings yet
- Control System Analysis Poles of A Transfer FunctionDocument4 pagesControl System Analysis Poles of A Transfer FunctionRyan Kim PatronNo ratings yet
- Week 2B - Online Classes - S2020 PDFDocument18 pagesWeek 2B - Online Classes - S2020 PDFIzax Afxal KhanNo ratings yet
- 8-Test Input Signal Transient and Steady-State Response of 1st Abd 2nd Order SystemsDocument32 pages8-Test Input Signal Transient and Steady-State Response of 1st Abd 2nd Order SystemsAzhar AliNo ratings yet
- Lab # 5 Modeling of Translational Mechanical System and To Calculate Its Various ResponsesDocument18 pagesLab # 5 Modeling of Translational Mechanical System and To Calculate Its Various Responseszain islamNo ratings yet
- Matlab, Simulink - Control Systems Simulation Using Matlab and SimulinkDocument10 pagesMatlab, Simulink - Control Systems Simulation Using Matlab and SimulinkTarkes DoraNo ratings yet
- Experiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionDocument12 pagesExperiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionNimra NoorNo ratings yet
- file_2102232353250Document61 pagesfile_2102232353250MUHOOZI DENISNo ratings yet
- Machine Control SystemsDocument9 pagesMachine Control SystemsHisham SyedNo ratings yet
- Control Systems Lab Manual - With Challenging ExperimentsDocument132 pagesControl Systems Lab Manual - With Challenging ExperimentsP POORNA CHANDRA REDDYNo ratings yet
- Introduction To Linear Control System PDFDocument13 pagesIntroduction To Linear Control System PDFAmitava BiswasNo ratings yet
- Modeling and Simulation of Dynamic Systems: Lecture Notes of ME 862Document9 pagesModeling and Simulation of Dynamic Systems: Lecture Notes of ME 862RajrdbNo ratings yet
- Lab 4-CS-LabDocument15 pagesLab 4-CS-LabLovely JuttNo ratings yet
- Control System PracticalDocument19 pagesControl System PracticalYashNo ratings yet
- Time Response AnalysisDocument37 pagesTime Response Analysis7014KANISHKA JAISWALNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Pole Zero PlotDocument2 pagesPole Zero PlotEashan PendseNo ratings yet
- Exp 6 - Pole Zero Plot (RA1811025010024)Document3 pagesExp 6 - Pole Zero Plot (RA1811025010024)Eashan PendseNo ratings yet
- Control System Engineering by Nagoor Kani by EasyEngineering - Net (5) - Pages-157-171Document15 pagesControl System Engineering by Nagoor Kani by EasyEngineering - Net (5) - Pages-157-171Eashan PendseNo ratings yet
- Race Engineering BrochureDocument10 pagesRace Engineering BrochureEashan PendseNo ratings yet
- CCNA Certification GuideDocument14 pagesCCNA Certification GuideFaizan Ul HaqNo ratings yet
- Battery Thermal ModelingDocument8 pagesBattery Thermal ModelingEashan PendseNo ratings yet
- Numerology Decoder PDFDocument3 pagesNumerology Decoder PDFChris Walker100% (3)
- J1 - Today 1 - First Test 2022 (KEY)Document3 pagesJ1 - Today 1 - First Test 2022 (KEY)EmanuelBriosoNo ratings yet
- DD Cen TS 14425-1-2003Document16 pagesDD Cen TS 14425-1-2003mossamorrisNo ratings yet
- PSS CAPE CoordinationGraphics DataSheetDocument4 pagesPSS CAPE CoordinationGraphics DataSheetMiguel Alfredo Perez OrtizNo ratings yet
- Developmental Psychology-Revised 2018Document51 pagesDevelopmental Psychology-Revised 2018Aadya PoddarNo ratings yet
- I Am Wondering If There Is Any Value To Adding Cdms To My GT With Dln. Does Anyone Have These Systems? and If So Which Ones Would You RecommendDocument11 pagesI Am Wondering If There Is Any Value To Adding Cdms To My GT With Dln. Does Anyone Have These Systems? and If So Which Ones Would You RecommendSahariar Bin ShafiqueNo ratings yet
- Unit 5.2Document4 pagesUnit 5.2Hanh TranNo ratings yet
- Auveco HNI 490Document1 pageAuveco HNI 490BillNo ratings yet
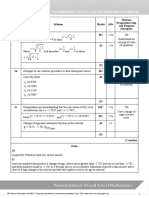
- Mark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Document7 pagesMark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Arthur LongwardNo ratings yet
- Nuig Lander1Document21 pagesNuig Lander1diana meriakri100% (1)
- Automatic Optimization and Elastic ConstantsDocument15 pagesAutomatic Optimization and Elastic ConstantsFebriman ZendratoNo ratings yet
- CPCCCA3025 Self Study GuideDocument9 pagesCPCCCA3025 Self Study GuidePranay BansalNo ratings yet
- Avian 48 Guide PDFDocument8 pagesAvian 48 Guide PDFEng-Mohamed Zakria ElbadryNo ratings yet
- KNH 413 - Case Study 14Document17 pagesKNH 413 - Case Study 14api-301118772No ratings yet
- Korea (2017) - Experimental Investigation On Massflow Characteristics of R245fa Through Electronic Expansion ValveDocument7 pagesKorea (2017) - Experimental Investigation On Massflow Characteristics of R245fa Through Electronic Expansion ValveMatias PezoNo ratings yet
- An Ecological Approach For Social Work PracticeDocument11 pagesAn Ecological Approach For Social Work PracticeJona MempinNo ratings yet
- Iso 1996 1 2016Document15 pagesIso 1996 1 2016ali_irvNo ratings yet
- BJT Mkwi4201 Bahasa InggrisDocument3 pagesBJT Mkwi4201 Bahasa Inggrisnatalia walunNo ratings yet
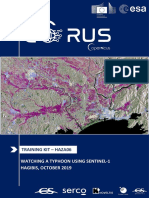
- Watching A Typhoon Using Sentinel-1Document39 pagesWatching A Typhoon Using Sentinel-1James GulreyNo ratings yet
- ASTM B265 - 13aDocument10 pagesASTM B265 - 13areza acbariNo ratings yet
- Jeann A. Gildo Bsed-Math IiiDocument3 pagesJeann A. Gildo Bsed-Math IiiJeann GildoNo ratings yet
- BS en 12457-2 - 2002Document30 pagesBS en 12457-2 - 2002Helio C. Souza33% (3)
- DLP For UCSPDocument6 pagesDLP For UCSPruth taccadNo ratings yet
- Lab 4B Moles of Iron and CopperDocument6 pagesLab 4B Moles of Iron and CopperLaura Sitar0% (1)
- DAY 1 Passage 1Document2 pagesDAY 1 Passage 1wick90715No ratings yet
- LetterDocument5 pagesLetterSameer NaveenaNo ratings yet
- Process Costing: Cost Accounting Principles, 9eDocument17 pagesProcess Costing: Cost Accounting Principles, 9eoliver tzNo ratings yet
- Amazon Food Review Clustering Using K-Means, Agglomerative & DBSCANDocument79 pagesAmazon Food Review Clustering Using K-Means, Agglomerative & DBSCANkrishnaNo ratings yet
- CHEM 1211K Lab Fall 2020: Submission GuideDocument3 pagesCHEM 1211K Lab Fall 2020: Submission GuideParker Santo DomingoNo ratings yet
- Hph203 Lecture 03-1Document38 pagesHph203 Lecture 03-1Chengetai ManyaraNo ratings yet