You might also like
- MPPT For PV System Figure7Document13 pagesMPPT For PV System Figure7tabendaaarzuNo ratings yet
- Research On MPPT Control Strategy Based On CCAOA ADocument16 pagesResearch On MPPT Control Strategy Based On CCAOA AprtqskNo ratings yet
- MPPT Algorithm Based On Artificial Bee Colony For PV SystemDocument13 pagesMPPT Algorithm Based On Artificial Bee Colony For PV SystemAnescu MihaiNo ratings yet
- Maximum Power Point TrackingDocument10 pagesMaximum Power Point TrackingAbdullrahman Al-ShammaaNo ratings yet
- Accepted Manuscript: Applied Soft ComputingDocument24 pagesAccepted Manuscript: Applied Soft ComputingMD AbdullahNo ratings yet
- 13-A Hybrid Global Maximum Power Point Tracking Technique With Fast Convergence Speed For Partial-Shaded PV Systems-18Document10 pages13-A Hybrid Global Maximum Power Point Tracking Technique With Fast Convergence Speed For Partial-Shaded PV Systems-18Đông Ngô ThanhNo ratings yet
- An Enhanced EPP-MPPT Algorithm With Modified Control Technique in Solar-Based Inverter Applications: Analysis and ExperimentationDocument9 pagesAn Enhanced EPP-MPPT Algorithm With Modified Control Technique in Solar-Based Inverter Applications: Analysis and ExperimentationHamid SuliamanNo ratings yet
- A Rprop-Neural-Network-Based PV Maximum Power Point Tracking Algorithm With Short-Circuit Current LimitationDocument5 pagesA Rprop-Neural-Network-Based PV Maximum Power Point Tracking Algorithm With Short-Circuit Current LimitationRajo PATRICK alisonNo ratings yet
- Intechopen 79711Document22 pagesIntechopen 79711zedibNo ratings yet
- P&o 1Document11 pagesP&o 1SAHBI MARROUCHINo ratings yet
- 1 s2.0 S1568494615002057 MainDocument11 pages1 s2.0 S1568494615002057 MainM ShakirNo ratings yet
- Resume 6 The State of Charge Estimating Methods For BatteryDocument28 pagesResume 6 The State of Charge Estimating Methods For BatteryIhsan BayuNo ratings yet
- A Novel Approach On MPPT Algorithm For Solar Panel Using Buck Boost ConverterDocument5 pagesA Novel Approach On MPPT Algorithm For Solar Panel Using Buck Boost Converterayoub reseauNo ratings yet
- MPPT overview using P&O algorithmDocument26 pagesMPPT overview using P&O algorithmBaidyanath JenaNo ratings yet
- Electric Power Systems Research: Jiying Shi, Wen Zhang, Yongge Zhang, Fei Xue, Ting YangDocument8 pagesElectric Power Systems Research: Jiying Shi, Wen Zhang, Yongge Zhang, Fei Xue, Ting YangAbdullrahman Al-ShammaaNo ratings yet
- Chen 2018 IOP Conf. Ser. Mater. Sci. Eng. 322 072029Document9 pagesChen 2018 IOP Conf. Ser. Mater. Sci. Eng. 322 072029hemchand movvaNo ratings yet
- An Enhanced MPPT Method Based On ANN-assisted Sequential Monte Carlo and Quickest Change DetectionDocument30 pagesAn Enhanced MPPT Method Based On ANN-assisted Sequential Monte Carlo and Quickest Change DetectionzedibNo ratings yet
- Improved Particle Swarm Optimization Based MPPT For PV Systems Under Partial Shading ConditionsDocument6 pagesImproved Particle Swarm Optimization Based MPPT For PV Systems Under Partial Shading ConditionsNazrul HaqemNo ratings yet
- An Implementation of Maximum Power Point Tracking Algorithms For Photovoltaic Systems Using Matlab and Arduino Based RTOS SystemDocument5 pagesAn Implementation of Maximum Power Point Tracking Algorithms For Photovoltaic Systems Using Matlab and Arduino Based RTOS SystemIJSTENo ratings yet
- 10-A Global Maximum Power Point Tracking Algorithm For Photovoltaic Systems Under Partially Shaded Conditions Using Modified Maximum Power Trapezium Method-21Document11 pages10-A Global Maximum Power Point Tracking Algorithm For Photovoltaic Systems Under Partially Shaded Conditions Using Modified Maximum Power Trapezium Method-21Đông Ngô ThanhNo ratings yet
- A Novel Approach For Fuzzy Logic PV Inverter Controller OptimizationDocument19 pagesA Novel Approach For Fuzzy Logic PV Inverter Controller OptimizationNirmal Kumar PandeyNo ratings yet
- A Modified Multi-Stepped Constant Current Based On Gray Wolf Algorithm For Photovoltaics ApplicationsDocument15 pagesA Modified Multi-Stepped Constant Current Based On Gray Wolf Algorithm For Photovoltaics Applicationskulsoomfatima666No ratings yet
- Grid Interactive Micro Inverter Using MPPT & Incremental Conductance MethodDocument10 pagesGrid Interactive Micro Inverter Using MPPT & Incremental Conductance MethodJineshNo ratings yet
- MPPT Tech 1Document12 pagesMPPT Tech 122mt0403No ratings yet
- Maximum Power Tracking Using GAF AlgorithmDocument15 pagesMaximum Power Tracking Using GAF AlgorithmTechnico TechnocratsNo ratings yet
- Presented By: Rahul BishtDocument19 pagesPresented By: Rahul BishtRahul BishtNo ratings yet
- Optimization of Photovoltaic Power SystemDocument11 pagesOptimization of Photovoltaic Power Systemsalemg82No ratings yet
- Bài Báo MPPTDocument16 pagesBài Báo MPPTH - WinNo ratings yet
- Town Planning1Document25 pagesTown Planning1Pravat SatpathyNo ratings yet
- An Experimental Estimation of Hybrid ANFIS-PSO-Based MPPT For PV Grid Integration Under Fluctuating Sun IrradianceDocument12 pagesAn Experimental Estimation of Hybrid ANFIS-PSO-Based MPPT For PV Grid Integration Under Fluctuating Sun IrradianceHarshal VaidyaNo ratings yet
- Artificial Intelligence Based MPPT Techniques For Solar Power System: A ReviewDocument17 pagesArtificial Intelligence Based MPPT Techniques For Solar Power System: A ReviewBright MelbaNo ratings yet
- Renewable and Sustainable Energy Reviews: Hegazy Rezk, Ahmed Fathy, Almoataz Y. AbdelazizDocument10 pagesRenewable and Sustainable Energy Reviews: Hegazy Rezk, Ahmed Fathy, Almoataz Y. AbdelazizDany ApablazaNo ratings yet
- Versatile P-Sim Model For PV ArrayDocument4 pagesVersatile P-Sim Model For PV ArrayShubhashish BhaktaNo ratings yet
- IEEE ICNTET Conference FormatDocument4 pagesIEEE ICNTET Conference Formatoko nanaNo ratings yet
- PV-MPPTDocument5 pagesPV-MPPTSajid AkhterNo ratings yet
- A Global Maximum Power Point Tracking Scheme Employing DIRECT Search Algorithm For Photo Voltaic SystemsDocument12 pagesA Global Maximum Power Point Tracking Scheme Employing DIRECT Search Algorithm For Photo Voltaic Systemsunexposed7No ratings yet
- Estimation of Power Battery SOC Based On PSO-Elman Neural NetworkDocument6 pagesEstimation of Power Battery SOC Based On PSO-Elman Neural NetworkbatuhanNo ratings yet
- An Efficient Fuzzy-Logic Based Variable-Step Incremental Conductance MPPT Method For Grid-Connected PV SystemsDocument11 pagesAn Efficient Fuzzy-Logic Based Variable-Step Incremental Conductance MPPT Method For Grid-Connected PV SystemsHamid SuliamanNo ratings yet
- Adaptive Harmonic Compensation For Grid Connected PV SystemDocument5 pagesAdaptive Harmonic Compensation For Grid Connected PV SystemJDNo ratings yet
- An Improved Maximum Power Point Tracking Controller For PV Systems Using Artificial Neural NetworkDocument6 pagesAn Improved Maximum Power Point Tracking Controller For PV Systems Using Artificial Neural NetworkOns Zarrad Ep JemaaNo ratings yet
- A Low Cost Maximum Power Point Tracker With The Hybrid Algorithm That Uses Temperature MeasurementDocument5 pagesA Low Cost Maximum Power Point Tracker With The Hybrid Algorithm That Uses Temperature MeasurementNomi WahlaNo ratings yet
- An Enhanced 0.8VOC-Model-based GlobalDocument9 pagesAn Enhanced 0.8VOC-Model-based Global0overpower0No ratings yet
- 11-A High Performance Global Maximum Power Point Tracker of PV System For Rapidly Changing Partial Shading Conditions-21Document10 pages11-A High Performance Global Maximum Power Point Tracker of PV System For Rapidly Changing Partial Shading Conditions-21Đông Ngô ThanhNo ratings yet
- Particle Swarm Optimization Based Maximum Power Point Tracking For Partially Shaded Photovoltaic ArraysDocument7 pagesParticle Swarm Optimization Based Maximum Power Point Tracking For Partially Shaded Photovoltaic ArrayswafaNo ratings yet
- Fuzzy Logic Based MPPT For Grid Connected PV SystemsDocument3 pagesFuzzy Logic Based MPPT For Grid Connected PV SystemshellohellokkNo ratings yet
- Sliding-Mode Control Based On Index Control Law For MPPT in Photovoltaic SystemsDocument9 pagesSliding-Mode Control Based On Index Control Law For MPPT in Photovoltaic Systemst.benaissaNo ratings yet
- BAT Algorithm MPPT for Bidirectional Converter in PV under Partial ShadingDocument9 pagesBAT Algorithm MPPT for Bidirectional Converter in PV under Partial ShadingInov Rainhard MekaNo ratings yet
- Modified Seagull Optimization For MPPTDocument16 pagesModified Seagull Optimization For MPPTJayaparvathy RNo ratings yet
- Literature Review On Solar MPPT SystemDocument12 pagesLiterature Review On Solar MPPT SystemSifatSharminNo ratings yet
- POWERQDocument13 pagesPOWERQKGNo ratings yet
- Maximum Power Point Tracking Control Using NeuralDocument14 pagesMaximum Power Point Tracking Control Using Neuralmuhamad otongNo ratings yet
- Thesis On Maximum Power Point TrackingDocument5 pagesThesis On Maximum Power Point Trackingoaehviiig100% (2)
- RVR & JC College of Engineering (Autonomous) Chowdavaram:: Guntur - 522019 Department of Electrical & Electronics EngineeringDocument34 pagesRVR & JC College of Engineering (Autonomous) Chowdavaram:: Guntur - 522019 Department of Electrical & Electronics EngineeringSaitejaNo ratings yet
- Parameters Estimation of Photovoltaic Module Using Nonlinear Least Square Algorithm: A Comparative StudyDocument6 pagesParameters Estimation of Photovoltaic Module Using Nonlinear Least Square Algorithm: A Comparative StudygoserunnerNo ratings yet
- Synopsis MPPT Using ArduinoDocument5 pagesSynopsis MPPT Using ArduinoSunnySinghNo ratings yet
- Grey Wolf Optimization Algorithm Based MPPT Technology For Solar PV SystemDocument2 pagesGrey Wolf Optimization Algorithm Based MPPT Technology For Solar PV SystemNexgen TechnologyNo ratings yet
- An Experimental Estimation of Hybrid ANFIS-PSO-Based MPPT For PV Grid Integration Under Fluctuating Sun IrradianceDocument12 pagesAn Experimental Estimation of Hybrid ANFIS-PSO-Based MPPT For PV Grid Integration Under Fluctuating Sun Irradiancerasheed ahmed rNo ratings yet
- Design and Simulation of P&O MPPT for 72-Cell PVDocument5 pagesDesign and Simulation of P&O MPPT for 72-Cell PVrameshNo ratings yet
- An Efficient ANN Based MPPT Optimal Cont-93774097Document12 pagesAn Efficient ANN Based MPPT Optimal Cont-93774097azeygpchNo ratings yet
- Classical Approach to Constrained and Unconstrained Molecular DynamicsFrom EverandClassical Approach to Constrained and Unconstrained Molecular DynamicsNo ratings yet
- MPPT GwoDocument6 pagesMPPT GwoShavira AYNo ratings yet
- MPPT AnnDocument6 pagesMPPT AnnShavira AYNo ratings yet
- Improved PV Panel Performance Using ANFIS-Based MPPTDocument4 pagesImproved PV Panel Performance Using ANFIS-Based MPPTJuan MataNo ratings yet
- MPPT AcoDocument6 pagesMPPT AcoShavira AYNo ratings yet
- Mkaj 1093 - Unsaturated Soil Mechanics Project SEMESTER II, SESSION 2020/2021Document3 pagesMkaj 1093 - Unsaturated Soil Mechanics Project SEMESTER II, SESSION 2020/2021Lingeswarran Numbikannu0% (1)
- Status of ACE-9 SanctionedDocument7 pagesStatus of ACE-9 SanctionedPuneet NirajNo ratings yet
- 3.5 Light and ShadowsDocument4 pages3.5 Light and ShadowsNur ArtitisariNo ratings yet
- JZ10-11-UN20: Environmental ConsiderationsDocument6 pagesJZ10-11-UN20: Environmental Considerationsracoom34No ratings yet
- Belt, Rope and Chain DrivesDocument60 pagesBelt, Rope and Chain DrivesJason Dequin VillarosaNo ratings yet
- Some Admissibility Results for NumbersDocument11 pagesSome Admissibility Results for NumbersRavi DixitNo ratings yet
- Ray Optics 2024 New NotesDocument23 pagesRay Optics 2024 New NotesCiber AreaNo ratings yet
- 7UT CT-Requirements enDocument22 pages7UT CT-Requirements enEddyNo ratings yet
- 2019 Dse Phy 1b Ms e PDFDocument13 pages2019 Dse Phy 1b Ms e PDFCHIU KEUNG OFFICIAL PRONo ratings yet
- Aircraft Maintenance Manual: TASK 12 13 21 610 801 Servicing of The Oil Level of The ACMDocument10 pagesAircraft Maintenance Manual: TASK 12 13 21 610 801 Servicing of The Oil Level of The ACMCHIMONo ratings yet
- Design For Concrete-Filled CHSDocument3 pagesDesign For Concrete-Filled CHSYanfei JinNo ratings yet
- Auto-Tuning Rotor Resistance Identification of Induction Motor Considering Iron LossDocument4 pagesAuto-Tuning Rotor Resistance Identification of Induction Motor Considering Iron LossNickNo ratings yet
- Paper Mechanics Equilibrium ElasticityDocument20 pagesPaper Mechanics Equilibrium ElasticityRirinNo ratings yet
- N4 Electrotechnics Augustus 2019Document8 pagesN4 Electrotechnics Augustus 2019Petro Susan BarnardNo ratings yet
- ME Sci 7 Q3 0902 SGDocument20 pagesME Sci 7 Q3 0902 SGSophia TorresNo ratings yet
- CLMD4A AutomotiveG9 10Document25 pagesCLMD4A AutomotiveG9 10Eiay CommsNo ratings yet
- Ledvision: OR Lights From KARL STORZDocument12 pagesLedvision: OR Lights From KARL STORZSyed Ahad ZafarNo ratings yet
- Exhaust Base Vam Tonnage CalculationDocument9 pagesExhaust Base Vam Tonnage CalculationMagical RiyaNo ratings yet
- Grounding or Earthing Scheme in DCS or PLC Systems (39Document3 pagesGrounding or Earthing Scheme in DCS or PLC Systems (39Vraja KisoriNo ratings yet
- Silicon Zener Diodes for Stabilizing and Clipping CircuitsDocument4 pagesSilicon Zener Diodes for Stabilizing and Clipping CircuitsMohamad Toufan AkbarNo ratings yet
- LAB 7 MAE 4333 Daniel Perez & Trevor KaaseDocument4 pagesLAB 7 MAE 4333 Daniel Perez & Trevor Kaasedaniel perezNo ratings yet
- Neet Physics KotaDocument6 pagesNeet Physics KotaDipti SinghNo ratings yet
- Prepare Report On Gear and Its TerminologyDocument12 pagesPrepare Report On Gear and Its TerminologyMadhuri TelangeNo ratings yet
- Wet Towel Dryer AirflowDocument3 pagesWet Towel Dryer Airflowdendisneha reddy80% (5)
- Z & H ParameterDocument14 pagesZ & H ParameterTajatNo ratings yet
- +1 CBSE - PHYSICS CDF MATERIAL (37-60) .PMD PDFDocument24 pages+1 CBSE - PHYSICS CDF MATERIAL (37-60) .PMD PDFHema Baskaran100% (2)
- 7 HPLC Ay2223s2Document31 pages7 HPLC Ay2223s2Matty JakeNo ratings yet
- Macalloy CablesDocument12 pagesMacalloy CablesRaymond KinnairdNo ratings yet
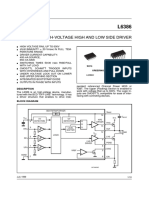
- L6386D - High-Voltage High and Low Side DriverDocument11 pagesL6386D - High-Voltage High and Low Side Driverdoppler9effectNo ratings yet
- Deformable - Chapter 5Document21 pagesDeformable - Chapter 5Charlotte FerriolNo ratings yet