You might also like
- DBMS exam questionsDocument2 pagesDBMS exam questionscompiler&automataNo ratings yet
- DBMS 2Document2 pagesDBMS 2Raavi SaamarNo ratings yet
- Sheiko Modified Hypertrophy v4.0Document24 pagesSheiko Modified Hypertrophy v4.0gersaNo ratings yet
- JHJHDocument2 pagesJHJHsubodhpaudel321No ratings yet
- Salon Cuisine: Plan RDC EchelleDocument1 pageSalon Cuisine: Plan RDC EchelleAchrefNo ratings yet
- AE (5th) May2017Document2 pagesAE (5th) May2017Amanpreet 2003052No ratings yet
- Data Comanda Client Reper: Saptamna 7Document16 pagesData Comanda Client Reper: Saptamna 7Ghiță SfîraNo ratings yet
- Engineering & Tool Steel Dimensional ProgrammeDocument2 pagesEngineering & Tool Steel Dimensional ProgrammeFernanda AndradeNo ratings yet
- Total Product Curve Average Product Curve: LabourDocument10 pagesTotal Product Curve Average Product Curve: LabourSk Basit AliNo ratings yet
- Basic. e 2Document23 pagesBasic. e 2Darshene ChandrasegaranNo ratings yet
- Free Simple Dual ChartDocument3 pagesFree Simple Dual ChartMultimedia Kejari KlungkungNo ratings yet
- MIU Essential Computing Lab Mark Sheet Summer 2020Document3 pagesMIU Essential Computing Lab Mark Sheet Summer 2020illuminityNo ratings yet
- Sheiko Modified Hypertrophy v4.0Document20 pagesSheiko Modified Hypertrophy v4.0visam14083No ratings yet
- Datil RanjangDocument1 pageDatil RanjangandriyastutiNo ratings yet
- BCom Reduced Fees As Per MU Circular Dated 04.08.2021Document1 pageBCom Reduced Fees As Per MU Circular Dated 04.08.2021aakash guptaNo ratings yet
- Bach Connect The Dot WorksheetDocument1 pageBach Connect The Dot Worksheetperro78No ratings yet
- Iobm MBA Logistics & Supply ChainDocument10 pagesIobm MBA Logistics & Supply ChainMuhammad AdnanNo ratings yet
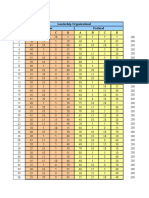
- Leadership Org DataDocument4 pagesLeadership Org DataszilagyiNo ratings yet
- BackupDocument6 pagesBackupArturo MesrojNo ratings yet
- Introduction To Solar EnergyDocument19 pagesIntroduction To Solar EnergyJawad AnsariNo ratings yet
- Cell Building Area Loading Final Breakup - 29th March 2022Document5 pagesCell Building Area Loading Final Breakup - 29th March 2022NitinNo ratings yet
- Panel Assy-Wired CG, Overhead Main SectionDocument7 pagesPanel Assy-Wired CG, Overhead Main Sectionsarvesh_ame2011No ratings yet
- MBA Logistics & Supply Chain Class TestDocument10 pagesMBA Logistics & Supply Chain Class TestMuhammad AdnanNo ratings yet
- Strategy to profit from bullish and bearish market scenariosDocument5 pagesStrategy to profit from bullish and bearish market scenariosakash advisorsNo ratings yet
- MK Kel 9. Analisis Networking (Maju Mundur)Document8 pagesMK Kel 9. Analisis Networking (Maju Mundur)Grace AngelinaNo ratings yet
- C60 circuit-breaker tripping curves explainedDocument5 pagesC60 circuit-breaker tripping curves explainedGultom Juliana LiliesNo ratings yet
- CashDocument1 pageCashsonny mark cabangNo ratings yet
- Charting AdinasandlerDocument6 pagesCharting Adinasandlerapi-388596355No ratings yet
- CCC LingDocument1 pageCCC LingCindyNo ratings yet
- Transformer Fusing Tables For Power Line Construction and Maintenance Mz132005enDocument2 pagesTransformer Fusing Tables For Power Line Construction and Maintenance Mz132005enRiven ExileNo ratings yet
- Arburg Allrounder 570s Multi-Component TD 680169 en GBDocument16 pagesArburg Allrounder 570s Multi-Component TD 680169 en GBEko Prastyo100% (1)
- Budgeting and Cash Flow Global Trends (Version For Students) .XLSBDocument12 pagesBudgeting and Cash Flow Global Trends (Version For Students) .XLSBDivyang ParsanaNo ratings yet
- 1641551982188Document12 pages1641551982188Anshul BansalNo ratings yet
- SF1-SF15 (Aii641500) PDFDocument44 pagesSF1-SF15 (Aii641500) PDFSegeyNo ratings yet
- Extrapolate Graph 1Document15 pagesExtrapolate Graph 1Nur AfiqahNo ratings yet
- Eup SummaryDocument1 pageEup SummaryAhmed El Khateeb أحمد الخطيبNo ratings yet
- Deg Aided Reserved Category 2021 22Document2 pagesDeg Aided Reserved Category 2021 22SamirNo ratings yet
- Chapter2 Calculating Power Consumption Rev1Document12 pagesChapter2 Calculating Power Consumption Rev1ORK BUNSOKRAKMUNYNo ratings yet
- Year Depreciation: Purchase Value 10000 Salvage Value 500 Life Time (Years) 5Document8 pagesYear Depreciation: Purchase Value 10000 Salvage Value 500 Life Time (Years) 519MF01 BarathwajNo ratings yet
- Financial Year: 2020-21 Assessment Year: 2021-22: TDS RATE CHART FY: 2020-21 (AY: 2021-22)Document2 pagesFinancial Year: 2020-21 Assessment Year: 2021-22: TDS RATE CHART FY: 2020-21 (AY: 2021-22)Mahesh Shinde100% (1)
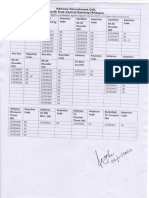
- Railway Recruitment cell Registration numbers of the Not Eligible candidates against sports Quota 2022 South East Central Railway BilaspurDocument2 pagesRailway Recruitment cell Registration numbers of the Not Eligible candidates against sports Quota 2022 South East Central Railway Bilaspurnallamalli subramanyamNo ratings yet
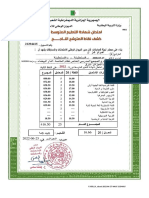
- CRAAF 2024Document21 pagesCRAAF 2024monrealmtoNo ratings yet
- 6.5 Tools and Techniques: 2.critical Path Method (CPM)Document8 pages6.5 Tools and Techniques: 2.critical Path Method (CPM)Mahira Hassan RaoufNo ratings yet
- Percent T 90Document7 pagesPercent T 90api-26186913No ratings yet
- EXP5Document2 pagesEXP5neel BanerjeeNo ratings yet
- Vizio E50-E1 CNET Review Calibration ReportDocument3 pagesVizio E50-E1 CNET Review Calibration ReportDavid KatzmaierNo ratings yet
- I Wanna EatDocument1 pageI Wanna EatGhizleneNo ratings yet
- Unit 3 - 5 - Unit HydrographDocument8 pagesUnit 3 - 5 - Unit Hydrographtom meeteiNo ratings yet
- Sextant - Step by StepDocument27 pagesSextant - Step by Stepsteriandediu100% (4)
- Ind 2.2Document12 pagesInd 2.2Марія Романівна ОчіченкоNo ratings yet
- Soil Available SulphurDocument3 pagesSoil Available SulphurSouvik Roy ChowdhuryNo ratings yet
- Juggernaut Method Spreadsheet Without AssistanceDocument3 pagesJuggernaut Method Spreadsheet Without AssistanceRolphulNo ratings yet
- Juggernaut Method Spreadsheet Without AssistanceDocument3 pagesJuggernaut Method Spreadsheet Without AssistanceRolphulNo ratings yet
- Vizio M65Q7-J01 CNET Review Calibration ResultsDocument3 pagesVizio M65Q7-J01 CNET Review Calibration ResultsDavid KatzmaierNo ratings yet
- LKH40Document1 pageLKH40Lucas SaucedoNo ratings yet
- CH 04Document60 pagesCH 04Lê JerryNo ratings yet
- OpentrackOverview eDocument1 pageOpentrackOverview eDwi HartantoNo ratings yet
- Dav Institute of Engineering and Technology, Jalandhar: Institute Summer Vacation Training (BTEC-321-18)Document1 pageDav Institute of Engineering and Technology, Jalandhar: Institute Summer Vacation Training (BTEC-321-18)VêRmã SàábNo ratings yet
- Door Lock SystemDocument18 pagesDoor Lock SystemVêRmã SàábNo ratings yet
- Github CMDDocument2 pagesGithub CMDVêRmã SàábNo ratings yet
- BookDocument1 pageBookVêRmã SàábNo ratings yet
- 210 TreesDocument41 pages210 Treesmanojmis2010No ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Linear Control Systems: Instructions To CandidatesDocument2 pagesLinear Control Systems: Instructions To CandidatesVêRmã SàábNo ratings yet
- Higher Engineering Mathematics Scilab CodesDocument188 pagesHigher Engineering Mathematics Scilab CodesRahul Gupta100% (1)
- A7838087 Electronic Devices For Gate Ec Study Notes On Semiconductor PhysicsDocument10 pagesA7838087 Electronic Devices For Gate Ec Study Notes On Semiconductor PhysicsAvinash KumarNo ratings yet
- Survey On Artificial Intelligence (AI)Document5 pagesSurvey On Artificial Intelligence (AI)VêRmã SàábNo ratings yet
- Implementing Web Scraping in Python With BeautifulsoupDocument6 pagesImplementing Web Scraping in Python With BeautifulsoupVêRmã SàábNo ratings yet
- LCS (4th) May2018Document2 pagesLCS (4th) May2018VêRmã SàábNo ratings yet
- Android Basics Nanodegree Syllabus: Before You Start Project 1: Build A Single Screen AppDocument5 pagesAndroid Basics Nanodegree Syllabus: Before You Start Project 1: Build A Single Screen AppyousufNo ratings yet
- Survey On Artificial Intelligence (AI)Document5 pagesSurvey On Artificial Intelligence (AI)VêRmã SàábNo ratings yet
- AmiNET125 User Guide-051910Document31 pagesAmiNET125 User Guide-051910Vladimir StakićNo ratings yet
- 6-PCI Planning SlidesDocument55 pages6-PCI Planning SlidesDong Tejero82% (11)
- Analog Telephony OverviewDocument11 pagesAnalog Telephony OverviewEamon FaceacheNo ratings yet
- VF IgxcDocument3 pagesVF IgxcGlenn A HirschNo ratings yet
- Decode DTMF Tones with the LC7385 DTMF Receiver ICDocument8 pagesDecode DTMF Tones with the LC7385 DTMF Receiver ICdasdawtNo ratings yet
- Re - 1982-06Document124 pagesRe - 1982-06Anonymous kdqf49qbNo ratings yet
- Dsa0066344 PDFDocument6 pagesDsa0066344 PDFJosé AdelinoNo ratings yet
- P3015T Series Pro2.0 GB V1.0Document21 pagesP3015T Series Pro2.0 GB V1.0Victor PATIÑONo ratings yet
- Nortroll - COMTROLL - ENGDocument14 pagesNortroll - COMTROLL - ENGnicolás_lorréNo ratings yet
- TWDLMDA20DRT Product Data SheetDocument10 pagesTWDLMDA20DRT Product Data Sheetjoel_garcia_leeNo ratings yet
- The Managing Director Odogunyan Industrial Estate Ikorodu - Lagos State Attention: MRDocument3 pagesThe Managing Director Odogunyan Industrial Estate Ikorodu - Lagos State Attention: MROlayiwola OnasanyaNo ratings yet
- ETR+3048 (3000W) Rectifier Module Rev07Document2 pagesETR+3048 (3000W) Rectifier Module Rev07TTIBCCANo ratings yet
- Slots and PortsDocument7 pagesSlots and Portsdaniyalshakeel573No ratings yet
- Fast Binary Counters and Compressors Generated by Sorting NetworkDocument11 pagesFast Binary Counters and Compressors Generated by Sorting Networkpsathishkumar1232544No ratings yet
- Protection CodesDocument1 pageProtection Codeszezo478No ratings yet
- Modbus Serial CommunicationDocument5 pagesModbus Serial CommunicationRaúl Emir Gutiérrez LópezNo ratings yet
- Summer Training Report On Vlsi and Fpga ImplementationDocument44 pagesSummer Training Report On Vlsi and Fpga ImplementationsaurabhNo ratings yet
- Nokia Dynamic Spectrum Sharing For Rapid 5G White Paper enDocument12 pagesNokia Dynamic Spectrum Sharing For Rapid 5G White Paper enghf hg100% (2)
- Sanyo Mod.c21lf37 Chassis La5-A PDFDocument30 pagesSanyo Mod.c21lf37 Chassis La5-A PDFroto44No ratings yet
- Pcits600 - 2 & Pcits2000 - 2Document37 pagesPcits600 - 2 & Pcits2000 - 2elie awadNo ratings yet
- Pioneer DEH-P510UB 5100UB 5150UB 5190UBDocument79 pagesPioneer DEH-P510UB 5100UB 5150UB 5190UBastrid28hNo ratings yet
- IR Sensor Circuit for Line FollowingDocument2 pagesIR Sensor Circuit for Line Followingvivek dongareNo ratings yet
- Tufting Gun User ManualDocument11 pagesTufting Gun User Manualgabs100% (6)
- DS2000 Manual en UnlockedDocument142 pagesDS2000 Manual en UnlockedАлексей ХоролецNo ratings yet
- IRF540 N-Channel Power MOSFETDocument6 pagesIRF540 N-Channel Power MOSFETAntonio Carlos BassoNo ratings yet
- DGS 8800eDocument82 pagesDGS 8800eDmNo ratings yet
- Computer SCience Xi Mini MockDocument2 pagesComputer SCience Xi Mini MockMuhammad Usman MunirNo ratings yet
- LCD DisplayDocument2 pagesLCD Displaydewidewi76No ratings yet
- Lecture Note 4 Blood Flow MetersDocument45 pagesLecture Note 4 Blood Flow Metersulaga nathanNo ratings yet
- Summer Training ReportDocument43 pagesSummer Training Reportsachin1065No ratings yet