You might also like
- Learn Digital and Microprocessor Techniques on Your SmartphoneFrom EverandLearn Digital and Microprocessor Techniques on Your SmartphoneNo ratings yet
- P+F Power Feed ModuleDocument2 pagesP+F Power Feed ModuleJeremiah CayondongNo ratings yet
- Assembly Features: Front ViewDocument2 pagesAssembly Features: Front ViewArun KumarNo ratings yet
- KFD2 EB2R4AB DatasheetDocument2 pagesKFD2 EB2R4AB Datasheetsteam100deg8229No ratings yet
- ThetfordDocument21 pagesThetfordWaldemarNo ratings yet
- USB, Ethernet and POWERLINK interfaces for B&R CPUsDocument19 pagesUSB, Ethernet and POWERLINK interfaces for B&R CPUsyggdrasilNo ratings yet
- EOS Power Distribution Board (EPDB) Led Status Description For Trendsetter Series V (Model TEE) PlatesettersDocument2 pagesEOS Power Distribution Board (EPDB) Led Status Description For Trendsetter Series V (Model TEE) PlatesettersJames AugustineNo ratings yet
- Kfd2-Eb2 Power BarrierDocument3 pagesKfd2-Eb2 Power Barriervikram.singhNo ratings yet
- Installation Instructions: PantherDocument16 pagesInstallation Instructions: PantherCarlos FrancoNo ratings yet
- 2.15 Fault Finding: Section 21 - Transmission 267Document20 pages2.15 Fault Finding: Section 21 - Transmission 267ThpNo ratings yet
- Solenoid Driver Technical Specifications and Wiring DiagramDocument3 pagesSolenoid Driver Technical Specifications and Wiring DiagramRavi Chandra PenumartiNo ratings yet
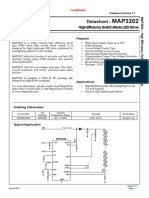
- Datasheet - : High Efficiency Switch Mode LED DriverDocument15 pagesDatasheet - : High Efficiency Switch Mode LED DriverMakhtar SeyeNo ratings yet
- Install and operate automatic transfer switchDocument1 pageInstall and operate automatic transfer switchEkanit ChuaykoedNo ratings yet
- Megger DLRO 10 ManualDocument124 pagesMegger DLRO 10 ManualirfanWPKNo ratings yet
- Portable Power Pack 44ah: User Manual and Product SpecificationsDocument8 pagesPortable Power Pack 44ah: User Manual and Product SpecificationsKarun AgarwalNo ratings yet
- 04 trobleshooting-KU630DFXZA 05 PDFDocument45 pages04 trobleshooting-KU630DFXZA 05 PDFbestsauveur36100% (1)
- 2 t502 21112 - Opm PDFDocument16 pages2 t502 21112 - Opm PDFcapricondragonNo ratings yet
- MTL2220Document1 pageMTL2220Alvin Azhar IrfaniNo ratings yet
- Feig TST-SUVEK2 Loop CardDocument1 pageFeig TST-SUVEK2 Loop CardDmitriiȘtirbuNo ratings yet
- Fault Code 132 Accelerator Pedal or Lever Position Sensor Circuit - Voltage Below Normal or Shorted To Low SourceDocument17 pagesFault Code 132 Accelerator Pedal or Lever Position Sensor Circuit - Voltage Below Normal or Shorted To Low SourceJose Ruiz100% (1)
- QX140501 DELCOS BD G2 User ManualDocument37 pagesQX140501 DELCOS BD G2 User Manualnhan nguyenNo ratings yet
- Solid State Laser Error AgfaDocument8 pagesSolid State Laser Error AgfaLuiz MoraisNo ratings yet
- LG 42PG20 Plasma TV-Turn-On-Start Up Sequence-WebDocument1 pageLG 42PG20 Plasma TV-Turn-On-Start Up Sequence-WebCadwillNo ratings yet
- Solenoid Driver Isolated BarrierDocument3 pagesSolenoid Driver Isolated BarrierPhamHoaNo ratings yet
- 24-key LED Remote Controller ManualDocument5 pages24-key LED Remote Controller Manualzmei23No ratings yet
- CAN Pinout PDFDocument2 pagesCAN Pinout PDFcobraz420No ratings yet
- Dlr010hd Megaohm Meter MetescoDocument124 pagesDlr010hd Megaohm Meter MetescoPepe LeivaNo ratings yet
- Redundant Power Feed Module KFD2-EB2.R4A.B: FunctionDocument3 pagesRedundant Power Feed Module KFD2-EB2.R4A.B: Functionjansep adriculaNo ratings yet
- Komatsu FB15EX-11 Errors ListDocument11 pagesKomatsu FB15EX-11 Errors Listsugar4475% (4)
- OptiMate6 QuickGuideDocument1 pageOptiMate6 QuickGuidepowota9283No ratings yet
- 000 - C264 IhmDocument32 pages000 - C264 IhmES-SEKKOUNI MouradNo ratings yet
- Repair SDI PSU (LJ44-00101C) with error codesDocument76 pagesRepair SDI PSU (LJ44-00101C) with error codesAudio TecnologiaNo ratings yet
- Installation Guide: EnglishDocument16 pagesInstallation Guide: EnglishHernández Manzano BernardoNo ratings yet
- CV9202H-UPW Schematic DiagramDocument37 pagesCV9202H-UPW Schematic DiagrambelajartvkuNo ratings yet
- 16Document220 pages16indrajeetNo ratings yet
- Document (8) Minor Project, AnanthuDocument8 pagesDocument (8) Minor Project, AnanthuANANTHU PRADEEPNo ratings yet
- LED Indicators for ControlLogix ControllersDocument3 pagesLED Indicators for ControlLogix Controllerscarrot123456No ratings yet
- V 2 DiagramDocument65 pagesV 2 DiagramKakajan KhormaliNo ratings yet
- OCP8121 OrientChipDocument2 pagesOCP8121 OrientChipCarlos RobertoNo ratings yet
- Samsung Bn44-00177b Sip1920 Monitor 932mw Power-InverterDocument8 pagesSamsung Bn44-00177b Sip1920 Monitor 932mw Power-InverterzokiNo ratings yet
- BN4400177B Power Supply SCHDocument8 pagesBN4400177B Power Supply SCHdff1967dffNo ratings yet
- Direct Debit Formulary 2Document16 pagesDirect Debit Formulary 2ruimiguelsenaNo ratings yet
- Technical Bulletin: 1X Series General Purpose Supervision RelaysDocument8 pagesTechnical Bulletin: 1X Series General Purpose Supervision RelaysŽarko MočnikNo ratings yet
- 02 - Acd3 PCBDocument32 pages02 - Acd3 PCBRenee Carranza100% (1)
- Catálogo 6F Básico PDFDocument12 pagesCatálogo 6F Básico PDFbenjamin100% (1)
- ToshibaDocument2 pagesToshibaRanjani Rangarajan100% (2)
- High Voltage 8-CH LED Driver: Features General DescriptionDocument13 pagesHigh Voltage 8-CH LED Driver: Features General DescriptionSetiawan Abdul RochimNo ratings yet
- 1. General basic ElectricDocument28 pages1. General basic ElectricJoseP OsheNo ratings yet
- 04 Trobleshooting PDFDocument46 pages04 Trobleshooting PDFDwane Duncan100% (1)
- Troubleshooting: 4-1. First Checklist For TroubleshootingDocument26 pagesTroubleshooting: 4-1. First Checklist For TroubleshootingvivijaNo ratings yet
- 224579_engDocument4 pages224579_engControle QualidadeNo ratings yet
- LED Stair Lighting Controller Professional RF - ENDocument4 pagesLED Stair Lighting Controller Professional RF - ENAting SuwarnaNo ratings yet
- EC 301 Final 1Document12 pagesEC 301 Final 1Bishakha HalderNo ratings yet
- MTLx514 BDocument1 pageMTLx514 BFatima KhanNo ratings yet
- Installation Manual Series D 1FH: Proportional DC ValveDocument20 pagesInstallation Manual Series D 1FH: Proportional DC ValveАлексей Бурлаков100% (1)
- 4-1. TroubleshootingDocument39 pages4-1. Troubleshootingalexnder gallegoNo ratings yet
- REGARD Gas Detection Relay System OverviewDocument36 pagesREGARD Gas Detection Relay System OverviewlucasNo ratings yet
- PI EAP-5DxQ 191023Document2 pagesPI EAP-5DxQ 191023Brayan Enrique Senk TiznadoNo ratings yet
- Api RP 2a WSD 1pdf - CompressDocument1 pageApi RP 2a WSD 1pdf - CompressRamesh SelvarajNo ratings yet
- A Report On Kantajew MandirDocument21 pagesA Report On Kantajew MandirMariam Nazia 1831388030No ratings yet
- 1.1 Enterprise AssessmentDocument1 page1.1 Enterprise AssessmentGermanRobertoFongNo ratings yet
- Inner Unit EstimateDocument35 pagesInner Unit EstimateMir MoNo ratings yet
- YlideDocument13 pagesYlidePharaoh talk to youNo ratings yet
- Plant Disease Detection Using Deep LearningDocument5 pagesPlant Disease Detection Using Deep LearningIJRASETPublicationsNo ratings yet
- Comparative Media SystemsDocument10 pagesComparative Media SystemsJoram MutwiriNo ratings yet
- Map Project Rubric 2018Document2 pagesMap Project Rubric 2018api-292774341No ratings yet
- Creating Literacy Instruction For All Students ResourceDocument25 pagesCreating Literacy Instruction For All Students ResourceNicole RickettsNo ratings yet
- A Generation of Contradictions-Unlocking Gen Z 2022 China FocusDocument25 pagesA Generation of Contradictions-Unlocking Gen Z 2022 China FocusCindy Xidan XiaoNo ratings yet
- CHM131 Presentation - Oxidation of MetalsDocument11 pagesCHM131 Presentation - Oxidation of MetalsNazrul ShahNo ratings yet
- Search Engine Marketing Course Material 2t4d9Document165 pagesSearch Engine Marketing Course Material 2t4d9Yoga Guru100% (2)
- Grab E-Receipt for 15,000 RP Ride on March 30Document1 pageGrab E-Receipt for 15,000 RP Ride on March 30WellyNo ratings yet
- DataSheet IMA18-10BE1ZC0K 6041793 enDocument8 pagesDataSheet IMA18-10BE1ZC0K 6041793 enRuben Hernandez TrejoNo ratings yet
- DSC analysis of hair denaturationDocument2 pagesDSC analysis of hair denaturationDiosel Rezia PrazaNo ratings yet
- Training Report On Machine LearningDocument27 pagesTraining Report On Machine LearningBhavesh yadavNo ratings yet
- KJR 20 880 PDFDocument14 pagesKJR 20 880 PDFNam LeNo ratings yet
- HFH ch04Document11 pagesHFH ch04Harikrishan RNo ratings yet
- INA128 INA129: Features DescriptionDocument20 pagesINA128 INA129: Features DescriptionCDDSANo ratings yet
- 24.ratios, Rates and Proportions PDFDocument9 pages24.ratios, Rates and Proportions PDFMilsonNo ratings yet
- BOOK-Deva-Oracle MaterialDocument177 pagesBOOK-Deva-Oracle MaterialPAVANN TNo ratings yet
- LINDA ALOYSIUS Unit 6 Seminar Information 2015-16 - Seminar 4 Readings PDFDocument2 pagesLINDA ALOYSIUS Unit 6 Seminar Information 2015-16 - Seminar 4 Readings PDFBence MagyarlakiNo ratings yet
- INSYS - EBW Serie EbookDocument4 pagesINSYS - EBW Serie EbookJorge_Andril_5370No ratings yet
- Automatic Repeat Request (Arq)Document15 pagesAutomatic Repeat Request (Arq)Rahul RedkarNo ratings yet
- A Primer On Financial Time Series AnalysisDocument93 pagesA Primer On Financial Time Series AnalysisKM AgritechNo ratings yet
- Lost Jar Action: WCP Slickline Europe Learning Centre SchlumbergerDocument19 pagesLost Jar Action: WCP Slickline Europe Learning Centre SchlumbergerMohsin PvNo ratings yet
- Climate Change Survivor GameDocument22 pagesClimate Change Survivor Game许凉发No ratings yet
- 3 Manacsa&Tan 2012 Strong Republic SidetrackedDocument41 pages3 Manacsa&Tan 2012 Strong Republic SidetrackedGil Osila JaradalNo ratings yet
- Business Judgment Rule and Directors' Duty to Inform in Smith v Van GorkomDocument1 pageBusiness Judgment Rule and Directors' Duty to Inform in Smith v Van GorkomDorothy ParkerNo ratings yet
- Danbury BrochureDocument24 pagesDanbury BrochureQuique MartinNo ratings yet