You might also like
- Assignment No.1-Fuzzy LogicDocument9 pagesAssignment No.1-Fuzzy LogicAyush Kumar50% (2)
- CHC33015 Certificate III in Individual SupportDocument40 pagesCHC33015 Certificate III in Individual Supportஆர்த்தி ஆதி0% (4)
- Solution of VDI 2860 Standard HomeworkDocument4 pagesSolution of VDI 2860 Standard HomeworkCristian TascónNo ratings yet
- DPOCexam2008midterm SolutionDocument12 pagesDPOCexam2008midterm SolutionBerfu TürkmenNo ratings yet
- MATPOWER - A MATLAB Power System Simulation PackageDocument35 pagesMATPOWER - A MATLAB Power System Simulation Packageemanuelcnn38No ratings yet
- Jagdish Lal Hydraulic Machines SolutionDocument5 pagesJagdish Lal Hydraulic Machines SolutionRahul Mahela0% (1)
- Lamb2 PDFDocument186 pagesLamb2 PDFLibyaFlowerNo ratings yet
- CBP1 PDFDocument634 pagesCBP1 PDFMohamed Abou El hassanNo ratings yet
- Arora S IOD Chapter 2Document40 pagesArora S IOD Chapter 2Ivan100% (1)
- Camacho2007 PDFDocument24 pagesCamacho2007 PDFFabianOmarValdiviaPurizacaNo ratings yet
- ANSYS Tutorial - Design Optimization in DX - EDRDocument10 pagesANSYS Tutorial - Design Optimization in DX - EDRNithyanandan NarayanasamyNo ratings yet
- Outlining The Work Proposal (Part Two) : Describing The Plan To Solve The ProblemDocument28 pagesOutlining The Work Proposal (Part Two) : Describing The Plan To Solve The Problem柯泰德 (Ted Knoy)No ratings yet
- Theory and Applications of HVAC Control Systems A Review of Model Predictive Control MPCDocument13 pagesTheory and Applications of HVAC Control Systems A Review of Model Predictive Control MPCKhuleedShaikhNo ratings yet
- Modelling TurbineDocument20 pagesModelling TurbineJeison YarceNo ratings yet
- A Literature Survey On Load-Frequency Control For Conventional and Distribution Generation Power Systems PDFDocument17 pagesA Literature Survey On Load-Frequency Control For Conventional and Distribution Generation Power Systems PDFvenkataswarnaNo ratings yet
- MARTECH 2024 - 1st AnnoucementDocument2 pagesMARTECH 2024 - 1st AnnoucementMiguel CelisNo ratings yet
- Simulink Time 1 Simple Oscillator: M y + C y + Ky 0Document16 pagesSimulink Time 1 Simple Oscillator: M y + C y + Ky 0amuumaNo ratings yet
- Multiobjective SlidesDocument46 pagesMultiobjective SlidesBetty NagyNo ratings yet
- Fuzzy Logic PDFDocument11 pagesFuzzy Logic PDFsandyNo ratings yet
- Examination Solutions of Simple Buckling Column by Second-Order AnalysisDocument8 pagesExamination Solutions of Simple Buckling Column by Second-Order AnalysiskiddhoNo ratings yet
- Mech Sem6Document17 pagesMech Sem6Nidhi GandhiNo ratings yet
- Bending VibrationsDocument11 pagesBending Vibrationshyld3nNo ratings yet
- Rotating Machinery PDFDocument81 pagesRotating Machinery PDFmacromoleculeNo ratings yet
- Robust Controller by QFTDocument5 pagesRobust Controller by QFTkishan2016No ratings yet
- I Do Like CFD Vol1 - 2ed - v00Document299 pagesI Do Like CFD Vol1 - 2ed - v00ipixunaNo ratings yet
- RacDocument6 pagesRacYogesh DanekarNo ratings yet
- Classical Electrodynamics: John David JacksonDocument8 pagesClassical Electrodynamics: John David JacksonAnonymous bVp8QWSNo ratings yet
- Kalman Filter SlidesDocument27 pagesKalman Filter Slidessaeed14820No ratings yet
- KRUPA GARCÍA, Pablo TESISDocument192 pagesKRUPA GARCÍA, Pablo TESISRohanNo ratings yet
- Five Phase Brushless DC Machine Direct Drive SysteDocument10 pagesFive Phase Brushless DC Machine Direct Drive SystePraveen Nayak BhukyaNo ratings yet
- rr320803 Process Dynamics and ControlDocument6 pagesrr320803 Process Dynamics and ControlSRINIVASA RAO GANTANo ratings yet
- Niraj Kumar: Study of Sloshing Effects in A Cylindrical Tank With and Without Baffles Under Linear AccelerationDocument31 pagesNiraj Kumar: Study of Sloshing Effects in A Cylindrical Tank With and Without Baffles Under Linear AccelerationSaurabh Suman100% (1)
- Active Suspension SystemDocument24 pagesActive Suspension SystemmujeebNo ratings yet
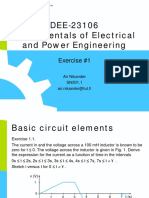
- DEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1Document12 pagesDEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1shoptodipNo ratings yet
- NFEM Ch01 PDFDocument15 pagesNFEM Ch01 PDFmadhuNo ratings yet
- Matlab Simulink IntroDocument14 pagesMatlab Simulink IntrobdeepeshNo ratings yet
- $$$$ Simulation Compressible Flow OpenFoam PDFDocument99 pages$$$$ Simulation Compressible Flow OpenFoam PDFdavid0775No ratings yet
- Model Predictive Control ToolboxDocument11 pagesModel Predictive Control ToolboxBruno Demmian Cabrera LetzkusNo ratings yet
- Economic Dispatch in Power SystemsDocument3 pagesEconomic Dispatch in Power SystemsDivyeshPSinghNo ratings yet
- PreviewDocument58 pagesPreviewFrancisco OppsNo ratings yet
- Global Optimization With MATLAB Products (Draft) - MathWorks PDFDocument67 pagesGlobal Optimization With MATLAB Products (Draft) - MathWorks PDFrajNo ratings yet
- Mean-Value Modelling and Robust Control of The Airpath of A Turbocharged Diesel EngineDocument168 pagesMean-Value Modelling and Robust Control of The Airpath of A Turbocharged Diesel EngineANIAPIERONINo ratings yet
- Economic Load Dispatch Using PSO MethodeDocument53 pagesEconomic Load Dispatch Using PSO MethodeBhavya AlapatiNo ratings yet
- Motor DC 1Document40 pagesMotor DC 1anderelelectronicNo ratings yet
- ThesisDocument230 pagesThesisAbdelhalim Taieb BrahimNo ratings yet
- Runge 4 Order Method: Major: All Engineering Majors Authors: Autar Kaw, Charlie BarkerDocument16 pagesRunge 4 Order Method: Major: All Engineering Majors Authors: Autar Kaw, Charlie BarkerjesantNMNo ratings yet
- Dynamic Programming MatlabDocument6 pagesDynamic Programming MatlabRitesh SinghNo ratings yet
- Workshop: Manifold: ANSYS Fluent Getting StartedDocument44 pagesWorkshop: Manifold: ANSYS Fluent Getting StartedSahil JawaNo ratings yet
- Advanced Control Systems: B.N. SarkarDocument11 pagesAdvanced Control Systems: B.N. SarkargopinathNo ratings yet
- Chemical Reaction Engineering Module Users GuideDocument390 pagesChemical Reaction Engineering Module Users GuideYuvaraj DhandapaniNo ratings yet
- Introductory Methods of Numerical Analysis - S. S. SastryDocument141 pagesIntroductory Methods of Numerical Analysis - S. S. SastrySindhuDasariNo ratings yet
- Park LynchDocument542 pagesPark LynchLe Dinh Phong0% (1)
- OptimizationDocument198 pagesOptimizationJorge Mario RodriguezNo ratings yet
- Creating A Digital Twin of A Power Plant With Clara: Jan Koltermann / Sebastian MieckDocument17 pagesCreating A Digital Twin of A Power Plant With Clara: Jan Koltermann / Sebastian MieckSTEAG123No ratings yet
- Differential Transformation Method for Mechanical Engineering ProblemsFrom EverandDifferential Transformation Method for Mechanical Engineering ProblemsNo ratings yet
- Harvey G Cragon-Computer Architecture and Implementation-Cambridge University Press (2000)Document328 pagesHarvey G Cragon-Computer Architecture and Implementation-Cambridge University Press (2000)motazNo ratings yet
- Thesis 24Document115 pagesThesis 24SalimNo ratings yet
- Final DocumentDocument73 pagesFinal DocumentAjay DakuriNo ratings yet
- Capstone Final Report-1Document53 pagesCapstone Final Report-1AbhijeetNo ratings yet
- 180+ WAT & GD Topics For MBA Aspirants 2020 (With Answers)Document7 pages180+ WAT & GD Topics For MBA Aspirants 2020 (With Answers)Priyadarshini SahooNo ratings yet
- Vdocuments - MX - Control Systems by Nagrath Gopal Solution Manual PDFDocument128 pagesVdocuments - MX - Control Systems by Nagrath Gopal Solution Manual PDFPriyadarshini SahooNo ratings yet
- Sample File Data Sufficiency: Q.1-Direction: The Question Below Consists of A Question and Two Statements Numbered I and II GivenDocument14 pagesSample File Data Sufficiency: Q.1-Direction: The Question Below Consists of A Question and Two Statements Numbered I and II GivenPriyadarshini SahooNo ratings yet
- Control Systems: Theory and Applications, 2nd Edition: Product AttributesDocument2 pagesControl Systems: Theory and Applications, 2nd Edition: Product AttributesPriyadarshini Sahoo100% (1)
- Your Answer Is CorrectDocument151 pagesYour Answer Is CorrectPriyadarshini SahooNo ratings yet
- Bodheeprep Tita Parajumbles Practice Problems PDFDocument27 pagesBodheeprep Tita Parajumbles Practice Problems PDFPriyadarshini SahooNo ratings yet
- Module 3: Actuators For Robots Lecture 7: Actuators For Robots-Part I ObjectivesDocument7 pagesModule 3: Actuators For Robots Lecture 7: Actuators For Robots-Part I ObjectivesPriyadarshini SahooNo ratings yet
- Assign 1Document1 pageAssign 1Priyadarshini SahooNo ratings yet
- Top-8 CAT DILR Sets PDFDocument40 pagesTop-8 CAT DILR Sets PDFPriyadarshini SahooNo ratings yet
- EE306 Power System AnalysisDocument2 pagesEE306 Power System AnalysisPriyadarshini SahooNo ratings yet
- Controller of ExaminationsDocument25 pagesController of ExaminationsPriyadarshini SahooNo ratings yet
- Notice 1560323996Document28 pagesNotice 1560323996Priyadarshini SahooNo ratings yet
- Identification Affidavit PDFDocument1 pageIdentification Affidavit PDFPriyadarshini SahooNo ratings yet
- HelloDocument4 pagesHellogauravgeniusNo ratings yet
- RFM300 WiDocument2 pagesRFM300 WiWilliamNo ratings yet
- Enterprise Integration EngineerDocument10 pagesEnterprise Integration Engineergabiacu123No ratings yet
- Priteshpawar Com Chinese Alternatives To Popular Apps and Websites Tech IndustryDocument16 pagesPriteshpawar Com Chinese Alternatives To Popular Apps and Websites Tech IndustrySiddhivinayak WaghmodeNo ratings yet
- Test 2 Lab 6Document8 pagesTest 2 Lab 6M7. SotariNo ratings yet
- IOT RecordDocument29 pagesIOT RecordKaleeswariNo ratings yet
- ComputerDocument28 pagesComputerJai RaiNo ratings yet
- C&D Flooded Batteries-KCR-KARDocument4 pagesC&D Flooded Batteries-KCR-KARvikasmikkuNo ratings yet
- Cópia de Manual - AMPTS - IIDocument76 pagesCópia de Manual - AMPTS - IIRenan HenriquesNo ratings yet
- Domain 6 - Security Assessment and TestingDocument35 pagesDomain 6 - Security Assessment and TestingNgoc Do100% (1)
- Dual Pressure Module, E-PP Pressure Temp Module, E-PT: Service ManualDocument46 pagesDual Pressure Module, E-PP Pressure Temp Module, E-PT: Service Manualjhon aguileraNo ratings yet
- Setting Up Electronically Controlled Complex SystemsDocument61 pagesSetting Up Electronically Controlled Complex Systemsfrezer mesfin100% (1)
- SHE PLUG Download 1Document20 pagesSHE PLUG Download 1Somoskői GáborNo ratings yet
- Caterpillar Sis (01.2014) MultilanguageDocument10 pagesCaterpillar Sis (01.2014) MultilanguageTemmy Candra Wijaya100% (1)
- International Legal Comparative Guide - Cybersecurity 2022Document214 pagesInternational Legal Comparative Guide - Cybersecurity 2022Tom Kakanowski100% (1)
- E Vaccination System Using AiDocument17 pagesE Vaccination System Using AiBRO.V͙A͙M͙S͙I͙ Ƥeͥ†eͣrͫ꧂No ratings yet
- Assignment 03: Design Patterns: CS 812: Object Oriented Analysis and Design Fall 2020 Class: MS-ITDocument3 pagesAssignment 03: Design Patterns: CS 812: Object Oriented Analysis and Design Fall 2020 Class: MS-ITAbdulBasit AslamNo ratings yet
- Sppu Engineering Questions PaperDocument3 pagesSppu Engineering Questions Paperrohitgagare99No ratings yet
- SAP JD - Astral - 221221 - 194611Document5 pagesSAP JD - Astral - 221221 - 194611Adnan JavedNo ratings yet
- Design Systems Formatted PDFDocument66 pagesDesign Systems Formatted PDFOleksiy OsiychukNo ratings yet
- 01-SAMSS-023 PDF - Intrusive Online Corrosion MonitoringDocument4 pages01-SAMSS-023 PDF - Intrusive Online Corrosion MonitoringZahidRafiqueNo ratings yet
- L1 SAP Process InsightsDocument55 pagesL1 SAP Process InsightsGustavo RosselNo ratings yet
- LG 32lh2000-Za 32lh2010-zb Chassis Ld91a mfl50326815 0912-Rev01Document78 pagesLG 32lh2000-Za 32lh2010-zb Chassis Ld91a mfl50326815 0912-Rev01Dejan MarinkovicNo ratings yet
- Dsu - Micro ProjectDocument20 pagesDsu - Micro ProjectSwati Manohar lakadeNo ratings yet
- Install n8n - Open Source Workflow Automation - On LinuxDocument4 pagesInstall n8n - Open Source Workflow Automation - On Linuxhermatech.infoNo ratings yet
- Group Ii - December 2020Document63 pagesGroup Ii - December 2020ANISH KAFLENo ratings yet