You might also like
- Circulatory System QuestionsDocument4 pagesCirculatory System QuestionsJohn Vincent Gonzales50% (2)
- Basic Statistical Tools in Research and Data AnalysisDocument5 pagesBasic Statistical Tools in Research and Data AnalysisAira VillarinNo ratings yet
- Seismology: Surface Waves and Earth OscillationsFrom EverandSeismology: Surface Waves and Earth OscillationsBruce BoltNo ratings yet
- Adjoint MethodDocument37 pagesAdjoint MethodAries SattiNo ratings yet
- The Lucky Symbol of A Fish On The PalmDocument4 pagesThe Lucky Symbol of A Fish On The PalmANTHONY WRITER80% (5)
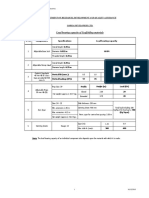
- Scaffolding Load Bearing CapacityDocument1 pageScaffolding Load Bearing CapacityGanga Daran100% (4)
- Acid Base ImbalanceDocument50 pagesAcid Base ImbalanceDian Pratiwi BurnamaNo ratings yet
- Kepler's Celestial MusicDocument24 pagesKepler's Celestial Musicfranciscoacfreitas100% (1)
- The Elements of Stochastic Processes - With Applications To The Natural Sciences Norman T JDocument130 pagesThe Elements of Stochastic Processes - With Applications To The Natural Sciences Norman T JJuan David Leal Campuzano100% (1)
- 1888 For Almost DUMMIES - Robert J WielandDocument126 pages1888 For Almost DUMMIES - Robert J Wielandpropovednik100% (1)
- Example Problems Basics of Space Flight Rocket PropulsionDocument32 pagesExample Problems Basics of Space Flight Rocket PropulsionsalmanNo ratings yet
- DPOCexam2008midterm SolutionDocument12 pagesDPOCexam2008midterm SolutionBerfu TürkmenNo ratings yet
- Vibration Chapter02 Ver2.0Document147 pagesVibration Chapter02 Ver2.0Batuhan GünerNo ratings yet
- Abdominal Compartment Syndrome PDFDocument326 pagesAbdominal Compartment Syndrome PDFviaereaNo ratings yet
- Review PDFDocument200 pagesReview PDFbenicilloNo ratings yet
- C T Sun Mechanics of Aircraft Structures Solution 160327193546 PDFDocument270 pagesC T Sun Mechanics of Aircraft Structures Solution 160327193546 PDFLeonardo AlvesNo ratings yet
- Athans, M. - The Matrix Mininum Principle (NASA)Document23 pagesAthans, M. - The Matrix Mininum Principle (NASA)benito59olivaresNo ratings yet
- Extended Paper 2 May 00Document12 pagesExtended Paper 2 May 00Mari Carmen Pérez GómezNo ratings yet
- MatlabDocument45 pagesMatlabHamid SiNo ratings yet
- Matlab IntroDocument145 pagesMatlab IntroAlejandro JRNo ratings yet
- Kelley - Iterative Methods For Optimization-SIAM (1999) PDFDocument187 pagesKelley - Iterative Methods For Optimization-SIAM (1999) PDFLeiteantonioNo ratings yet
- Spatial Mechanisms Lecture NotesDocument77 pagesSpatial Mechanisms Lecture NotesErico Eric100% (1)
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachFrom EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachNo ratings yet
- Modeling methanol synthesis from CO2-rich syngasDocument72 pagesModeling methanol synthesis from CO2-rich syngasshanku_biet75% (4)
- Convex Programming LecturesDocument212 pagesConvex Programming LecturespdfeeNo ratings yet
- Developing Managers and LeadersDocument48 pagesDeveloping Managers and LeadersMazen AlbsharaNo ratings yet
- The University of Edinburgh Dynamical Systems Problem SetDocument4 pagesThe University of Edinburgh Dynamical Systems Problem SetHaaziquah TahirNo ratings yet
- Designing A Neuro PD With Gravity Compensation For Six Legged RobotDocument8 pagesDesigning A Neuro PD With Gravity Compensation For Six Legged RobotVishwanath KetkarNo ratings yet
- 03 LagrangianDynamics 1Document28 pages03 LagrangianDynamics 1Terence DengNo ratings yet
- Continuous Low-Thrust Trajectory Optimization PDFDocument136 pagesContinuous Low-Thrust Trajectory Optimization PDFkuldeepNo ratings yet
- Fortran ProgramDocument9 pagesFortran ProgramSandip PaulNo ratings yet
- Maternal and Child PreboardDocument17 pagesMaternal and Child PreboardMichelle GambolNo ratings yet
- Structural Dynamics Computational Dynamics Soren R. K. NielsenDocument210 pagesStructural Dynamics Computational Dynamics Soren R. K. NielsenTem PounoNo ratings yet
- Applied Linear AlgebraDocument857 pagesApplied Linear AlgebraLemuel Ambie BarangoNo ratings yet
- Analytical Dynamics of Particles and Rigid BodiesDocument456 pagesAnalytical Dynamics of Particles and Rigid BodiesAykie Tropangzombie CastilloNo ratings yet
- AN APPLICATION OF OPTiMAL CONTROL THEORY TO AN ANTI - TANK WEAPON SYSTEMDocument174 pagesAN APPLICATION OF OPTiMAL CONTROL THEORY TO AN ANTI - TANK WEAPON SYSTEMАнтон ТрутцеNo ratings yet
- Applied Dynamics ManualDocument197 pagesApplied Dynamics ManualMr RockyNo ratings yet
- Introduction of Frechet and Gateaux DerivativeDocument6 pagesIntroduction of Frechet and Gateaux DerivativeNiflheimNo ratings yet
- DP by Bellman Functional EquationDocument296 pagesDP by Bellman Functional Equation.cadeau01No ratings yet
- Response of Impulsive Force For A Sdof System in MatlabDocument18 pagesResponse of Impulsive Force For A Sdof System in MatlabAbi AbiNo ratings yet
- The Parachute Problem: Ronald Phoebus and Cole ReillyDocument23 pagesThe Parachute Problem: Ronald Phoebus and Cole ReillyChathura ChamikaraNo ratings yet
- Double PendulumDocument13 pagesDouble PendulumAkanistha BanerjeeNo ratings yet
- Model Predictive Control For UAVsDocument24 pagesModel Predictive Control For UAVsJulio BVNo ratings yet
- 01 Continuum MechanicsDocument2 pages01 Continuum MechanicsHernan Vega0% (1)
- Space Craft DyanmicsDocument118 pagesSpace Craft Dyanmicsعدي الشحاذNo ratings yet
- Dynamical SystemsDocument102 pagesDynamical SystemsMirceaSuscaNo ratings yet
- A Finite Element Formulation For Nonlinear Incompressible Elastic and Inelastic AnalysisDocument53 pagesA Finite Element Formulation For Nonlinear Incompressible Elastic and Inelastic Analysisguanicad712827No ratings yet
- A Universal Instability of Many-Dimensional Oscillator SystemsDocument117 pagesA Universal Instability of Many-Dimensional Oscillator SystemsBrishen Hawkins100% (1)
- Mechanics NotesDocument339 pagesMechanics NotesBATOOL M38No ratings yet
- UMAT Theory - Nader Abedrabbo, PH.DDocument2 pagesUMAT Theory - Nader Abedrabbo, PH.DSebastiao SilvaNo ratings yet
- Solitons IntroDocument8 pagesSolitons Intromexicanu99No ratings yet
- Newmark Hall Tripartite SpectrumDocument3 pagesNewmark Hall Tripartite SpectrumYorgos Baltzopoulos100% (1)
- Dynamics of Supercavitating TorpedoDocument169 pagesDynamics of Supercavitating TorpedoHari HaranNo ratings yet
- Park LynchDocument542 pagesPark LynchLe Dinh Phong0% (1)
- Matlab Report1Document2 pagesMatlab Report1Samy MohamedNo ratings yet
- Nonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiDocument19 pagesNonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiMustafa KösemNo ratings yet
- Digital Signal Processing: Solved HW For Day 9Document20 pagesDigital Signal Processing: Solved HW For Day 9Cuau SuarezNo ratings yet
- SPH 202 Modern Physics: Dr. N. O.Hashim Department of Physics Kenyatta University January 13, 2015Document97 pagesSPH 202 Modern Physics: Dr. N. O.Hashim Department of Physics Kenyatta University January 13, 2015KeybateNo ratings yet
- Meshless Methods for Plastic Injection Molding SimulationDocument170 pagesMeshless Methods for Plastic Injection Molding SimulationJoderadorNo ratings yet
- Holonomic and Nonholonomic ConstraintsDocument20 pagesHolonomic and Nonholonomic Constraintsoltinn0% (1)
- Arora S IOD Chapter 2Document40 pagesArora S IOD Chapter 2Ivan100% (1)
- Practical guide to solving real-life optimal control problemsDocument39 pagesPractical guide to solving real-life optimal control problemschaitanya_awast9336No ratings yet
- Prof. K. Ramamurthi Prof. S. Varunkumar: Aerospace EngineeringDocument998 pagesProf. K. Ramamurthi Prof. S. Varunkumar: Aerospace EngineeringKannan RamarajNo ratings yet
- Rigid Body MotionDocument8 pagesRigid Body Motiondesi prawitaNo ratings yet
- Recent Advances in Robust Control - Novel Approaches and Design MethodsDocument474 pagesRecent Advances in Robust Control - Novel Approaches and Design MethodscemokszNo ratings yet
- MC Test Diff Eq Ch 08Document2 pagesMC Test Diff Eq Ch 08Kimberly SolisNo ratings yet
- Matrix ExponentialDocument14 pagesMatrix Exponentialvignesh0617No ratings yet
- Solution To The Positive Real Control Problem For Linear Time-Invariant SystemsDocument13 pagesSolution To The Positive Real Control Problem For Linear Time-Invariant SystemsRohit GandhiNo ratings yet
- Problems Chaptr 1 PDFDocument4 pagesProblems Chaptr 1 PDFcaught inNo ratings yet
- Femap UputstvoDocument66 pagesFemap Uputstvodakiza019-1No ratings yet
- Factorization Methods for Discrete Sequential EstimationFrom EverandFactorization Methods for Discrete Sequential EstimationNo ratings yet
- Solutions To Exercises: Min Max MinDocument18 pagesSolutions To Exercises: Min Max MinBetaSolDelEsteNo ratings yet
- Optimal ControlDocument38 pagesOptimal ControlLaercioNo ratings yet
- Dynamic Programming and Optimal Control: Third Edition Dimitri P. BertsekasDocument54 pagesDynamic Programming and Optimal Control: Third Edition Dimitri P. BertsekasRachit ShahNo ratings yet
- MIT6 231F15 Solution1Document9 pagesMIT6 231F15 Solution1Berfu TürkmenNo ratings yet
- Optimal ControlDocument38 pagesOptimal ControlLaercioNo ratings yet
- Solutions To Exercises: Min Max MinDocument18 pagesSolutions To Exercises: Min Max MinBetaSolDelEsteNo ratings yet
- Rule MiningDocument2 pagesRule Miningravi ramaNo ratings yet
- MATHS Revision DPP No 1Document8 pagesMATHS Revision DPP No 1ashutoshNo ratings yet
- AsianJPharmHealthSci 2-3-428Document5 pagesAsianJPharmHealthSci 2-3-428KkanuPriyaNo ratings yet
- Reset Logon, Networking & PersonalizationDocument10 pagesReset Logon, Networking & PersonalizationDenis TomaNo ratings yet
- Petroleum GeologyDocument1 pagePetroleum GeologyRevan AkramNo ratings yet
- Clipping (Advanced Grammar)Document3 pagesClipping (Advanced Grammar)Adriana MarcosNo ratings yet
- 16-31 Maret 2021Document23 pages16-31 Maret 2021Medika AntapaniNo ratings yet
- Tone - 5 - Plagal 1 - 4 Aug - 6ap - 6 Matt - ParalyticDocument6 pagesTone - 5 - Plagal 1 - 4 Aug - 6ap - 6 Matt - ParalyticMarguerite PaizisNo ratings yet
- Caring in Nursing: Four AspectsDocument47 pagesCaring in Nursing: Four AspectsAnuchithra RadhakrishnanNo ratings yet
- Demerit System PointsDocument87 pagesDemerit System PointsBusinessTech25% (4)
- Draft Law Regarding Matrimonial Regimes Family Donations and Successions PDFDocument56 pagesDraft Law Regarding Matrimonial Regimes Family Donations and Successions PDFMugaboNo ratings yet
- Four Theories of the Press - Libertarian vs AuthoritarianDocument8 pagesFour Theories of the Press - Libertarian vs Authoritarianআলটাফ হুছেইনNo ratings yet
- Sarah Lowthian.: Hello My Name IsDocument3 pagesSarah Lowthian.: Hello My Name Isapi-225679366No ratings yet
- Why Eye Is The Important Sensory Organ in Our LifeDocument3 pagesWhy Eye Is The Important Sensory Organ in Our LifeAljhon DelfinNo ratings yet
- B. Wordsworth by V.S. NaipaulDocument18 pagesB. Wordsworth by V.S. NaipaulanushkahazraNo ratings yet
- Born 1925 EngDocument30 pagesBorn 1925 EngFranz SchindlerNo ratings yet
- Mock Exam Practice - ListeningDocument5 pagesMock Exam Practice - ListeningChristeen221No ratings yet
- Quotation # SO2021/1274870: Quotation Date: Expiration: SalespersonDocument1 pageQuotation # SO2021/1274870: Quotation Date: Expiration: SalespersonAbdul WadoodNo ratings yet